六旋翼飞行器红外探测系统设计与验证
2015-04-04邱亚峰
张 雷,邱亚峰,孟 瑞
六旋翼飞行器红外探测系统设计与验证
张 雷,邱亚峰,孟 瑞
(南京理工大学 机械工程学院,江苏 南京 210094)
为了在人员无法到达的位置进行探测,设计出以六旋翼飞行器为搭载平台的红外探测系统。因为国内外没有一家将红外可见光融合系统与六旋翼飞行器系统融于一体的科研单位,因此该项目尚处于探索阶段。将先行进行红外探测系统与连接云台的设计,使其实现水平方向可360°,俯仰可-90°~+30°转动,之后对所设计的探测系统进行图像采集实验,根据不同视场得到的图像,可以验证设计的六旋翼飞行器红外探测系统满足设计要求。
六旋翼飞行器;红外探测系统;连接云台;图像采集
0 引言
现在对于大家来说旋翼式飞行器都不陌生,许多工科类院校或相关研发公司都在进行多旋翼飞行器的开发,目前比较普遍的有四旋翼飞行器、六旋翼飞行器,它们已在许多领域得到广泛应用。而红外可见光融合系统是指将轻型红外探测器与可见光(CCD)探测器捕获的图像进行综合,鉴于图像融合技术的重要性,世界上大部分发达国家包括部分发展中国家都竞相投入大量人力、财力和物力进行图像融合技术的研究,并已取得丰硕成果。例如美国研发团队基于人眼彩色视觉原理的融合方法已在1999年开发出红外与可见光融合的夜视系统装置、手持式及头戴式双传感器夜视镜等[1]。但是目前,国内外还没有一家将红外可见光融合系统与六旋翼飞行器系统融于一体的科研单位,因此该项目尚处于探索阶段,本文的目的是设计出可以与六旋翼飞行器连接的红外可见光融合系统和用于连接两者的云台结构,并验证所设计系统与结构的可行性。
1 技术要求与工作原理
1.1 技术要求
根据需要在空中对恶劣地理环境进行图像采集、同时又要适用于黑暗环境的特点,确定的相关技术指标如表1所示。
1.2 工作原理
本文将以六旋翼飞行器作为探测器的搭载平台。参照技术指标系统需实现水平方向360°全方位以及竖直方向-90°~+30°区域的监控扫描,该角度范围主要依靠飞行器云台来实现,飞行器云台依靠3个舵机的驱动能够实现水平旋转和一定角度范围的俯仰运动。根据设计要求飞行器负载平台需要将该探测器送到合适的位置并保持悬停状态,完成图像信息采集[2]。
探测器由轻型红外探测器与CCD探测器组成。CCD探测器在光线良好的情况下可探测较远距离的目标,对外界环境因素的依赖性较大,而红外探测器则不易受外界环境因素干扰,可以全天候工作,无需借助其他光源便可对热辐射源进行探测[3]。探测器图像分为两路经过无线传输设备传输至地面图像融合处理系统进行处理,可以输出单路视频,也可输出融合视频,供选择分析采用。DSP图像融合系统主要由前端的探测模块[4]和图像融合电路板组成,系统原理框图如图1所示。
2 红外可见光融合系统设计
2.1 图像融合探测器设计
设计的红外可见光融合系统的探测器根据表1中的技术指标选择可见光探测器和红外探测器:可见光探测器所使用的CCD是Watec公司的WAT-902H2(PAL)型高分辨率高灵敏度彩色摄像机。该探测器采用1/3In CCD图像传感器,有效像素数为752(H)×582(V),重量约140g,具有功耗低、体积小、重量轻、成像质量好等优点。探测器的镜头是中联科创的VM08050MP型可见光镜头,焦距范围8~80mm,视场角7.2°~41°,重量约100g;红外探测器采用的是广州飒特公司的HR320型非制冷红外热成像机芯,工作波段8~14mm,分辨率384×288,并配有电控调焦红外镜头,视场角11°~8.2°,焦距5m~¥。
2.2 图像融合系统的结构设计
图像视频采集的质量不仅与红外探测器、CCD探测器及无线传输模块性能参数有关,还与轻型红外与CCD融合系统结构的设计相关。该融合系统结构设计的要点是保持两套探测器视场大小相同并且有效重合,视场即通过探测器观测到的可视域的大小,两套探测器视场完全重合才能保证得到更好的融合图像质量。为满足视场重合要求,探测系统结构设计如图2所示。

表1 探测系统的技术指标
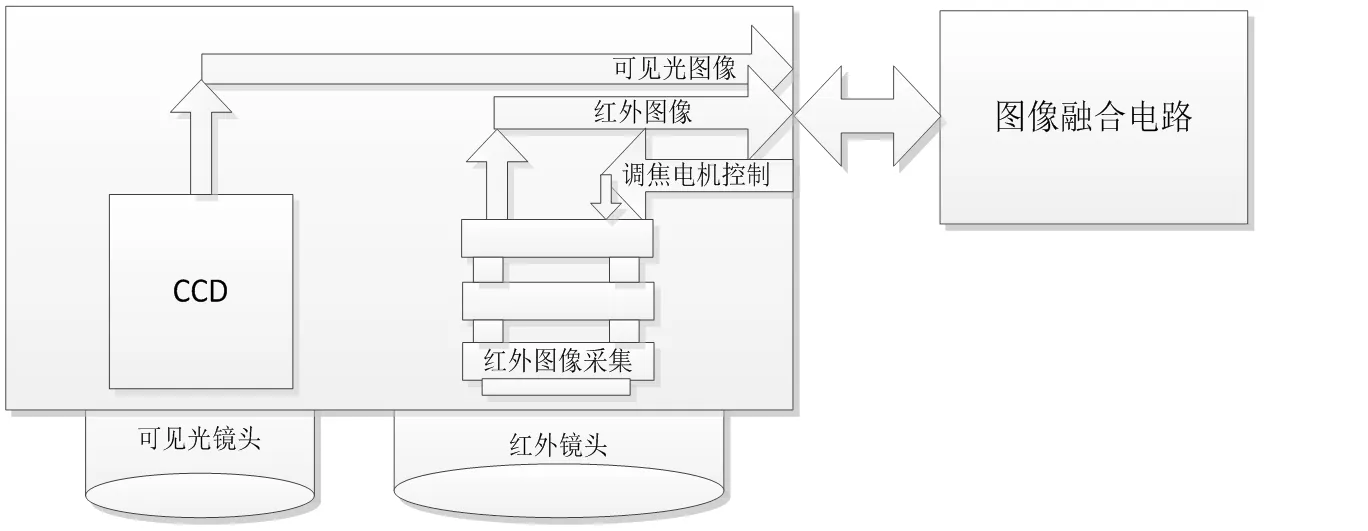
图1 红外图像融合系统原理框图
图2可见探测系统结构及其各零部件的装配关系,为保证红外与CCD探测器光轴平行,这两部分安装于前面板上,红外探测器固定安装在前面板右侧,使其轴线垂直于前面板,CCD探测器由镜头固定圈连接到前面板上,该部分可以微调,三维装配图如图3(a)所示,实物如图3(b)所示。
镜头固定圈上下设计2个3通孔,左右设计两个M3螺纹孔,镜头固定圈与前面板用两根固定销连接,探测器与镜头固定圈装配到位后用两个指螺紧固,保证探测器可以与固定圈一起绕固定销小幅度转动,便于调节CCD探测器的视场使其与红外探测器视场重合。左侧面板与支撑板分别设计一个圆柱凸台,并在凸台中心设计一螺纹通孔,将CCD探测器调节精准之后用两根螺钉安装在凸台螺纹孔中并且拧紧使其分别顶住探测器左右两侧。
2.3 图像融合系统光轴调校
配准前可见光探测器和红外探测器拍摄到的靶标图像[5]以及它们的融合图像如图4所示。可见光图像4(a)中靶标成黑色十字线,红外图像4(b)中靶标成白色十字线。在融合图像4(c)中两个十字线位置错开,水平方向相差15个像素,垂直方向相差13个像素,红外探测器分辨率为384×288,视场角为11°~8.2°,根据公式(1)计算可得[6],可见光探测器和红外探测器水平方向光轴偏差7.5mrad,垂直方向光轴偏差6.5mrad:

式中:为探测器的视场角;为该视场角对应的像素数;为该方向上十字线偏差像素数;为光轴偏差量,mrad。
1.接收机1 2.电池 3.左侧面板 4.CCD探测器 5.镜头固定圈 6.CCD镜头 7.底板 8.接收机2接收机盛放盒 10.上面板 11.支撑板 12.红外探测器 13.调节孔 14.红外镜头
图2 探测系统示意图
Fig.2 Schematic diagram of detection system

以轻型红外探测器为基准对CCD探测器安装结构进行调节,得到配准后可见光探测器和红外探测器拍摄到的靶标图像以及它们的融合图像如图5所示,可见光图像5(a)与红外图像5(b)中的靶标重合,误差在一个像素以内,根据公式(1)计算可得,可见光探测器和红外探测器水平方向光轴偏差0.5mrad,垂直方向光轴偏差0.5mrad,符合设计要求。
3 连接云台结构设计
根据技术指标,云台除用于安装红外可见光探测系统外,还需要实现水平方向360°,俯仰-90°~+30°转动。本文设计的云台由3种运动机构组成:纵向周转机构、横向周转机构、俯仰运动机构。纵向周转机构主要起到两个作用:第一作为飞行器与探测系统提供衔接,第二保证飞行器云台具备360°全方位转动能力,保证探测监视的快速响应特性;横向周转机构作用分为:增稳作用,保持云台安装探测系统的载物台面保持水平;俯仰运动机构作用:变换探测系统拍摄角度,保证能够探测到仰角15°以下的任意目标物(角度低于15°,主要考虑两点:①飞行器能够飞到制定点进行图像采集活动;②角度大于15°会导致机臂头端包括无刷电机、旋翼进入探测系统视场)[7]。
3.1 纵向周转结构设计
在纵向周转机构中,要求云台整体水平旋转速度不能过快,转速过高不易控制合理的定位,转速过慢不能够及时跟踪目标物,造成图像采集延迟,最好能够将转速控制在0.15r/s左右。舵机转速由无负载的情况下转过60°角所需时间来衡量,常见舵机的速度一般在0.11s/60°~0.21s/60°之间[8]。换算成转速为:0.794r/s~1.515r/s,若将舵机转速计算云台转速需计算传动比,依据公式(2):
=a/b=ba=a/b=b/a(2)
式中:为传动比;a、a、a、a分别为舵机齿轮的角速度、转速、直径、齿数;b、b、b、b分别为云台齿轮的角速度、转速、直径、齿数。
由云台转速及舵机转速范围可计算出传动比的范围:5.3<<10.1。因此在负载不大的情况下优先考虑小传动比设计,齿轮传动符合设计要求,根据传动比范围选用传动比=6,连接情况如图6所示。图6中可清晰看出各零部件之间的装配关系,即销轴用于飞行器升力单元与落地支撑单元的衔接。舵机带动小齿轮转动时,由于大齿轮与飞行器动力单元固定不动,舵机连同飞行器落地支撑单元围绕大齿轮旋转,实现云台360°全方位运转。
3.2 横向周转结构设计
飞行器探测系统主要针对图像视频的采集而研发,图像质量的好坏决定了飞行器探测系统的性能好坏。对目标物图像信息进行采集时,为提高画面质量,要保证探测系统红外镜头轴线与CCD镜头轴线所在平面处于水平位置,这就要求飞行器云台具备一定的横滚能力[9]。飞行器调整飞行姿态完成指定运动要求,会造成机身倾斜,尤其当飞行器做向右、向左飞行时,没有横向周转机构时,探测器带来的倾角将得不到补偿,采集的图像会严重倾斜,令人视觉疲劳[10]。

图4 配准前十字靶标图像

图5 配准后十字靶标图像 Fig.5 Cross target images after registration

图6 纵向周转机构示意图
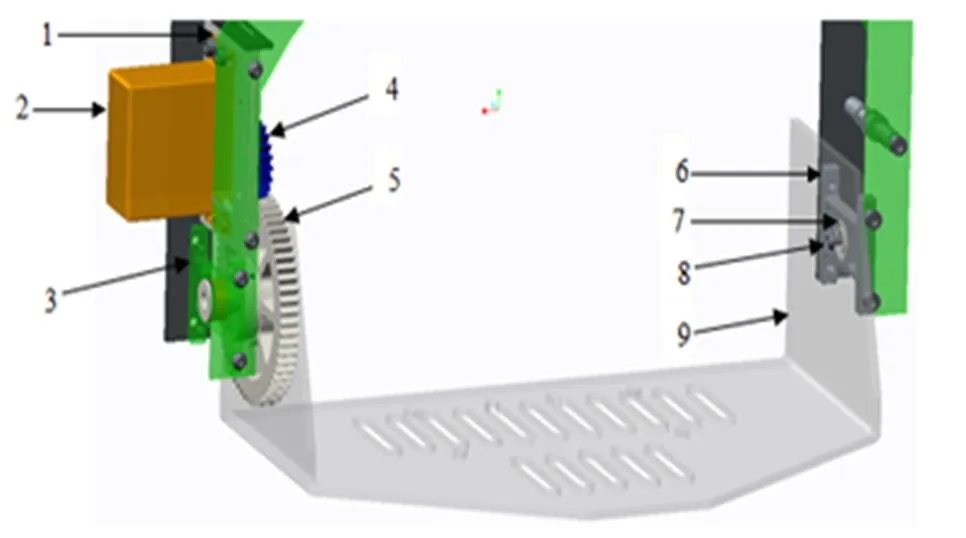
横向周转机构要具备响应快速的特性,因此所用舵机应具备较高转速,由于重力的作用,探测器安装于飞行器云台上方后,自身重力能够辅助舵机完成保持水平的动作,因此对于舵机来说,扭矩不用太高,又因为双传感器探测系统安装于俯仰机构上,因此横向周转机构整体尺寸较大,为了减轻总体重量预留足够大的安装空间,动力传动设计采用同步带传动,最小传动比为飞行器水平放置时的位置,此时≈4。横向周转机构动力源选用STO960HMG-3.5T型号数字舵机,该舵机运转角度范围-90°~90°,扭矩为12.2kg×cm,转速为0.16s/60°(1.042r/s),由式(2)及当传动比=4时,得滚转速度为0.26r/s,能够满足使用要求。设计的周转机构示意图如图7所示,图7(a)为周转机构三维装配效果图,图7(b)为左视图。
3.3 俯仰机构设计
飞行器云台俯仰机构设计是保证探测系统能够完成对正下方到水平偏上的区域进行扫描探测,云台俯仰机构的动力输出为俯仰轴系,该轴系由云台支撑架、左侧传动支撑轴系、右侧支撑轴系及负载台等组成。三维设计效果如图8所示。
3.4 飞行器探测系统整机展示
结合空间布局对以上几部分运动机构进行设计,并将各部分设计好的元件出具工程图,对所有元件进行定制或采购,最后装配在一起。整机如图9所示。
4 系统测试结果分析
我们对基于无人机平台的红外与可见光图像融合系统[11]进行了室外飞行的图像采集实验,图10(a)为飞行器搭载探测器飞行并且采集图像的实验。为充分保证实验安全性使飞行器高度到达20m左右悬停,此时飞行器距路上行走的人员两点之间的距离约为40m。图10(b)~(d)为探测系统采集到的图像,图(b)为可见光图像,图(c)为红外图像,图(d)为融合图像。由图可见,无人机搭载探测器从空中拍摄图像,经无线传输模块传输到地面接收器,能够采集到较为稳定清晰的图像。对比3张图可以看出可见光图像较为清晰的反映出视场内人物及路面的景象;由于室外气温较低,路面热辐射较少,红外图像可以清晰地辨认出路面上行走的人员目标;而融合图像具备两者图像的优点,背景清晰、目标明显[12]。

Fig.7 Schematic diagram of lateral flow diagram
1舵机安装板 2.舵机 3.工字支撑板1 4.小齿轮 5.大齿轮工字支撑板2 7.轴套1 8.销轴1 9.负载台

Fig.9 The detection system
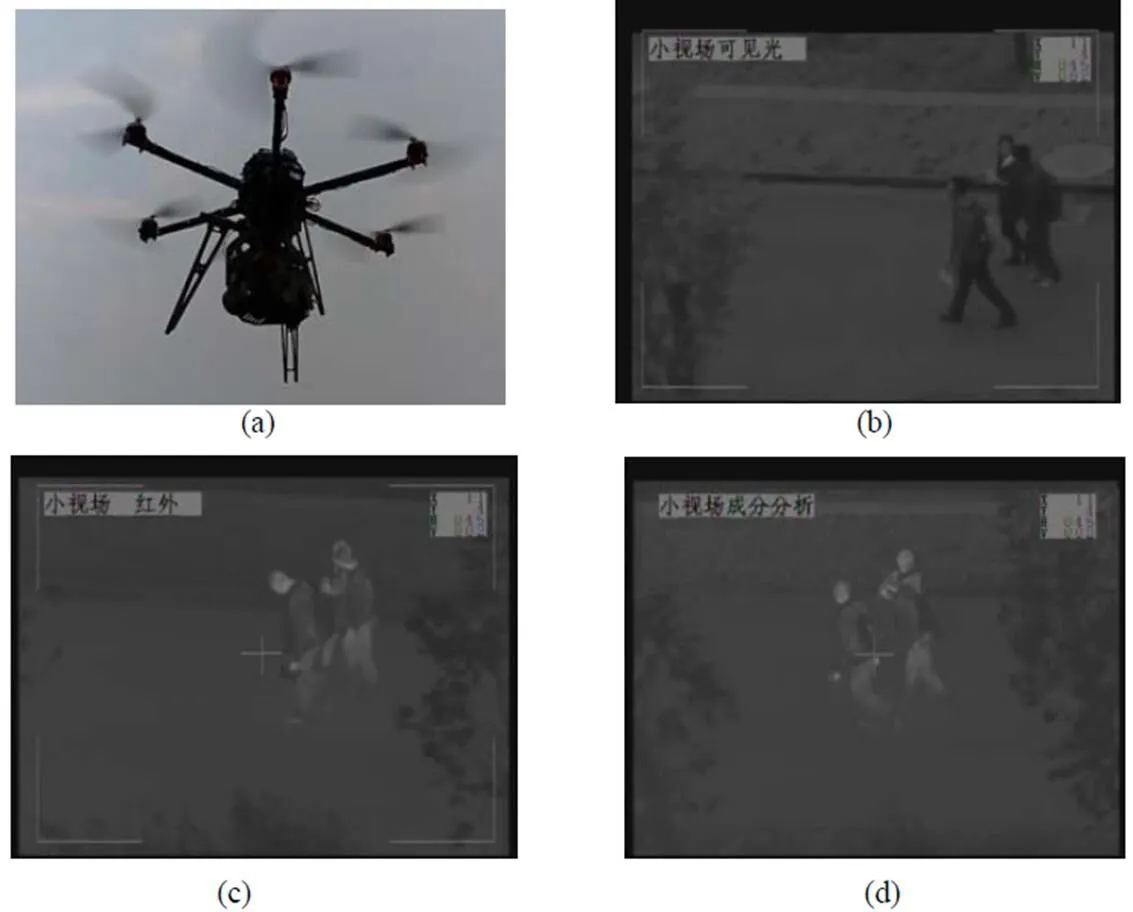
图10 飞行器搭载探测器飞行采集图像
5 结论
基于六旋翼飞行器平台的红外与可见光图像融合感知系统实现了图像融合系统与无人机的有效结合,在图像融合系统已有的探测优势下,进一步提高了其探测能力,拓展了其应用领域。系统结构紧凑,体积小,质量轻,操作简单,性能稳定。无人机可以将探测器带到人员无法到达的位置进行探测,其自主悬停、定位、巡航等功能为探测提供了很好的支持,为应对特殊的探测环境提供可能性。
[1] 田思. 微光与红外图像实时融合关键技术研究[D]. 南京: 南京理工大学, 2010.
[2] 赵坤, 车驰骋. 宽谱段近红外星敏感器光学系统的设计[J]. 应用光学, 2013, 34(1): 22-25.
[3] 李延彬, 韩四宁, 于天河. 红外景象模拟器[J].红外技术, 2006, 28(11): 661-664.
[4] 姜斌. 红外与可见光图像融合系统研究[D]. 南京:南京理工大学, 2012.
[5] 纪小辉, 杨璐, 姜旭. 一种多光谱多光轴准直系统的设计[J]. 应用光学, 2013, 34(6): 894-896.
[6] 赖德雄, 张云飞.飞行器红外隐身性能评估方法研究[J].红外技术, 2014, 36(5): 398-403.
[7] Eryk Brian Nice.[M]. Ithaca: The Faculty of the Graduate School of Cornell University, 2004.
[8] 宋文瑞. 涵道风扇式微型飞行器气动布局设计与气动特性分析[D]. 南京: 南京航天航空大学, 2012.
[9] John Seddon, Simon Newman.[M]. Third Edition, Wiley: 2011.
[10] 张阳胜, 刘荣. 一种新型六旋翼飞行器的设计[J]. 机械与电子, 2010(5): 64-66.
[11] Samir Bouabdallah, Marcelo Becker, Roland Siegwart. Autonomous miniature flying robots: coming soon[J]., 2007: 88-98.
[12] 王宇庆, 王索建. 红外与可见光融合图像的质量评价[J]. 中国 光学, 2014, 7(3): 396-401.
Six Rotor Aircraft Infrared Detection System Design and Verification
ZHANG Lei,QIU Ya-feng,MENG Rui
(,,210094,)
This infrared detection system, in which the six rotor aircraft is the carrying platform, is designed for detecting the area people have no access to. Since no R&D institution has been capable of integrating six rotor aircraft system with fusion technology of infrared and visible image, this project is still at a groping stage. This article covers the design of infrared detection system and connection structure which enables it rotate 360°in horizontal direction and -90°to+30°in the direction of pitch axis. And the images of different views from image acquisition test can prove that infrared detection system with six rotor aircraft meets the design requirements.
six rotor aircraft,infrared detection system,connection structure,image acquisition
TN216
A
1001-8891(2015)08-0685-06
2015-01-16;
2015-03-10.
张雷,男(1989-),江苏南通人,硕士研究生,从事机械电子工程方面研究。E-mail:843149114@qq.com。