一种新型自解耦六维力/力矩传感器结构设计与优化
2015-04-01熊雅晴虞伟建
熊雅晴,虞伟建
(南京航空航天大学 航空宇航学院,江苏 南京210016)
0 引 言
六维力/力矩传感器一直是国内外研究的热点课题之一,专家学者对弹性体式六维力/力矩传感器做了大量的研究探索。多维传感器的应用领域很广,主要包括:智能机器人领域[1]、航空航天和军事领域[2]、生物医学工程领域[3]以及其它工业领域。
多维传感器的厂家主要在美国、瑞士、德国以及日本。印度科学研究院设计了一种高灵敏度的基于近奇异构型的Stewart 平台的六维力/力矩传感器[4],其后,瑞士苏黎世联邦高等工学院研制了第一台电容式六维力/力矩传感器[5]。六维力/力矩传感器的核心部分是六分量天平,常用的六分量传感器的结构形式可以分为:筒式、柱式、环式、悬臂梁式、十字梁式、倒T 型等形式[6~9]。传统的传感器弹性体结构形式限制了它的使用范围,故而研制高精度的多维传感器是传感器技术发展的必然要求。
本文在工程需求和前人研究的基础上提出了一种新型的六维力/力矩传感器,该传感器可以感知三维空间坐标系下x,y,z 三个方向的力FX,FY,FZ和力矩MX,MY,MZ。该结构相对简单,具有良好的各向同性特性,测量精度高,维间耦合误差小。
1 六维传感器的结构
影响多维传感器精度的因素有很多,其中最主要的因素是维间耦合。解决耦合问题一方面是采取电路或信号处理方法,另一方面是从传感器自身结构上采取措施。从根本上讲,维间耦合程度的主要影响因素是传感器自身结构[9],因而,传感器弹性体的结构选取十分重要。
本文设计的六维传感器的结构如图1 所示,主体部分包括中心圆环和由4 个对称分布的T 形结构围绕而成的环状结构。该结构形状对称,具有较大的刚度。T 形梁是整个结构最薄处,也是结构的敏感元件。
2 有限元仿真

图1 六维传感器结构Fig 1 Structure of six-dimension force/torque sensor
利用有限元软件ANSYS 对六维力/力矩传感器弹性体进行静力分析,确定结构的尺寸和在单维力作用下结构的变形最大区域。
2.1 弹性体限元模型
弹性体结构尺寸如表1 所示。

表1 结构尺寸Tab 1 Structure size
弹性体材料的杨氏模量为2×1011Pa,材料密度为7 800 kg/m3,泊松比为0.33。利用有限元软件ANSYS 对六维力/力矩传感器进行三维实体建模,并用20 节点的高精度单元SOLID95 对模型划分网格。考虑到计算精度,采取疏密结合的方式进行网格划分。
2.2 结构应变分析
分别在结构上加载六个单维力,分析其应变分布情况。由于结构对称,FY与FX的受力情况等效,MY与MX的受力情况等效,故不在此列出。图2 分别给出了弹性体在不同受力情况下结构的总应变情况。

图2 不同载荷下结构应变分布Fig 2 Strain distribution of structure under different loads
根据分析结果可知:在FX=100 N 单独作用下,上下T型梁两侧的应变较大;在单维力FZ=100 N 单独作用下,T型梁的上下表面应变较大;在MX=100 N·m 单独作用下,上下T 型梁表面应变较大;在MZ=100 N·m 单独作用下,T 型梁两侧的应变较大。根据结构变形特点,选取应变较大区域作为单维传感器测量桥路的贴片位置。
3 应变片布片与组桥
在弹性体贴片区域选取16 条路径,对单维传感器的贴片区域沿路径方向各点的应变进行分析,从而确定应变片的最佳贴片位置。各路径的位置和应变片的分布情况如图3所示。A1~A4 路径分布在T 型梁的上表面。B1~B8路径分布在在T 型梁侧边轴线上。C1 ~C4 路径分布在T型梁的下表面。各路径起点在靠近中央环形一侧。在各路径图式位置粘贴应变片。

图3 应变片位置与路径标识Fig 3 Position of strain gages and paths sign
每一维使用4 只应变片构成全桥检测电路。6 组桥路共计24 只应变片,如图4 所示。
各桥路的输出电压为

其中,ε1为弹性体上第i 个传感器的应变值,U 为激励电压,K 为应变片的灵敏系数。
4 实验结果
4.1 各桥路输出
利用ANSYS 后处理器提供的路径映射技术得出路径上各点的应变情况。根据有限元分析结果计算出各桥路的输出。贴片点的位置发生变化,桥路的输出随着改变。图5给出了各桥路的应变输出与贴片位置的变化关系,其中横坐标表示贴片点与路径起点距离,纵坐标表示桥路的应变输出。

图4 组桥示意图Fig 4 Bridging form
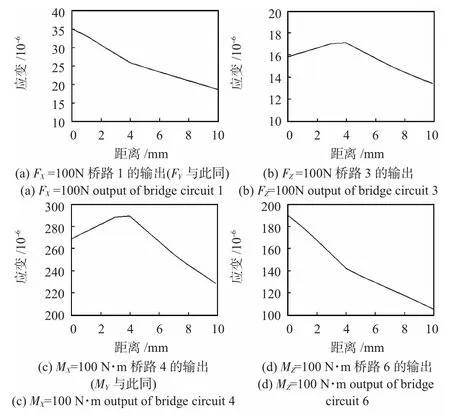
图5 各桥路的输出Fig 5 Output of each bridge circuit
可以看出:在单维力FX=100 N 作用下,贴片位置位于在路径起点处,桥路的测量值最大;在单维力FZ=100 N 作用下,贴片位置距离路径起点4 mm 处,应变输出有最大值;在单维力矩MX=100 N·m 作用下,贴片位置距离路径起点3.8mm处,应变输出有最大值。在单维力矩MZ=100N·m 作用下,贴片位置在路径起点处,桥路的输出最大。根据上述分析结果,选取应变输出最大的点为贴片点。
4.2 维间耦合分析
根据结构力学特征选取了贴片点。下面进一步分析六维力/力矩传感器的维间耦合效应。表2 给出了多维力/力矩传感器弹性体各桥路的输出情况,其中“-”表示不敏感。
根据表2 可知,FX主要影响桥路1 的输出,FY主要影响桥路2 的输出,FZ主要影响桥路3 的输出,MX主要影响桥路4 的输出,MY主要影响桥路5 的输出,MZ主要影响桥路6 的输出,各维力之间耦合误差小。
由以上分析可知,设计的传感器自身具有解耦功能,维间耦合小。

表2 各维力/力矩在不同桥路的输出Tab 2 Output of different bridge circuits under different dimensional force/torque
5 结 论
本文设计了一种新型的具有自解耦功能的六维力/力矩传感器弹性体结构。该弹性体结构简单,对称性好,刚度较大。根据传感器的力学特性确定了弹性体的布片和组桥方式。分析了贴片点的位置变化对桥路输出的影响,并确定了各测量桥路的最佳贴片位置,提高了传感器灵敏度。其中,桥路1、桥路2 和桥路6 的贴片点在路径起点处,桥路4、桥路5 的最佳特征点位于距离路径起点3.8 mm 处,桥路3 的贴片点在距离路径起点4 mm 处。最后,对传感器的维间耦合效应进行了分析,结果表明:新型六维力/力矩传感器的具有自解耦功能,各维力的输出之间影响较小。通过以上分析优化,使设计的传感器具有灵敏度高、维间耦合小等优点,具有较好的应用前景。
[1] 崔维娜,王 巍.一种新型水下机器人用六维腕力传感器[J].仪器仪表学报,2001,22(4):388-390.
[2] 孟祥玮,高学平.船模六自由度运动量的接触式测量[J].船舶力学,2010,14(4):379-384.
[3] 徐书法,国占宝,曹 坦,等.生物传感器及其在食品安全检测中的应用[J].现代科学仪器,2008(6):102-105.
[4] Ranganath R,Nair P S,Mruthyunjaya T S.A force-torque sensor based on a stewart platform in a near-singular configuration[J].Mechanism and Machine Theory,2004,39(9):971-998.
[5] Beyeler F,Muntwyler S,Nelson B J.A six-axis MEMS forcetorque sensor with micro-Newton and nano-new-tonmeter resolution[J].Journal of Microelectromechanical Systems,2009,18(2):433-441.
[6] 杨锦尊.新型传感器的应用及发展方向[J].现代电子技术,2006(20):17-18.
[7] 倪守忠,蒋晓波,尚贤平.环式传感器边界安装条件对力值测量误差的影响[J].工业计量,2013,23(2):15-17.
[8] 张美芹,王人成,胡 晓,等.6 分量应变式力传感器弹性体[J].中国康复医学杂志,2006,20(10):768-769.
[9] 吴宝元,吴仲城,申 飞.多维加速度场下六维力传感器弹性体结构设计[J].华中科技大学:自然科学版,2008,36:142-144.
