高旋弹用惯性测量系统多量程传感器组合设计*
2015-04-01刘秀锋侯利朋刘一鸣
刘秀锋,李 杰,2,侯利朋,刘一鸣,刘 俊,2,陈 伟
(1.中北大学 电子测试技术国防科技重点实验室,山西 太原030051;2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原030051;3.山西北方惠丰机电有限公司 科研设计二所,山西 长治046012)
0 引 言
在当今现代化高技术战争中,惯性制导系统应用于常规武器弹药实施精确打击有着不可替代的特殊地位,惯性制导武器大都依靠惯性测量系统测出载体的位置、速度和姿态等参数,通过计算机处理,形成制导指令信息传送给控制系统,对飞行轨迹不断进行调整,直到命中目标,所以,惯性测量系统的测量精度是决定武器系统能否精确打击的决定性因素之一。
然而在高速旋转环境下,载体的转速和加速度变化范围很大,尤其是在飞行初期,具有高转速、高加速度和高过载的特点,在此情况下,由于电机受到变参数等因素影响,电机超调和滞后很大[1],使得微惯性测量单元(microinertial measurement unit,MIMU)测得瞬时数据超过其量程,致使缺失数据无法实时解算。
基于上述影响因素,本文采用多量程的MEMS 惯性传感器与MIMU 组合测量弹体的各个飞行阶段的信息,将各量程的数据组合解算,得出弹体各个阶段的姿态、速度和位置信息[2]。
1 系统工作原理
半捷联惯性测量系统与被测弹体在俯仰和偏航方向捷联,滚转方向不捷联,由电机驱动惯性测量系统相对载体反转,形成一个“减旋”系统,该系统使滚转轴向所敏感到的角速率远小于弹体实际角速率,能有效隔离载体扰动,实现小量程高分辨率MEMS 惯性传感器测量高转速武器弹药的转速信息[3],其总体组成结构由半捷联机械结构部分、控制驱动部分和测试采集存储部分组成,系统的总体组成结构示意图如图1 所示。将60 r/s 量程陀螺(以下简称大陀螺)安装在弹体的轴向上,实时测量高速旋转武器弹药的角速率,并传入电机控制电路,将采集得到的转速信号实时转换为无刷直流电机的控制信号脉宽调制(PWM)脉冲,通过驱动器控制电机与高速旋转武器弹药的相反的角速率旋转,实现减旋的目的,系统工作原理图如图2 所示。微惯性测量单元(micro inertial measurement unit,MIMU)与电机轴向捷联,此时用于敏感载体姿态信息的MIMU 处于低转速的环境中,这样就可以将低量程高精度的MEMS 陀螺仪应用于惯性测量,提高惯性测量的精度[4]。

图1 系统总体组成结构示意图Fig 1 Diagram of system overall structure as a whole
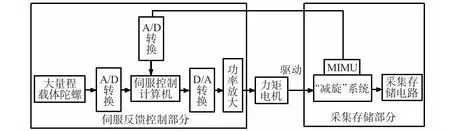
图2 系统工作原理框图Fig 2 Working principle block diagram of system
2 总体设计原理
2.1 硬件总体设计原理
该系统通过MIMU 敏感弹体的姿态信息,采用现场可编程门阵列(FPGA)控制A/D 转换器采集MIMU 数据并将其转换为数字信号,然后传输到FPGA 中,FPGA 将采集到的数据以一定格式编码,最终存储到FLASH 中,这些模块统称为采集存储模块(以下简称采存模块),实现弹体发射到落地过程中飞行参数的实时准确记录[5],因此,采存模块是常规弹药飞行参数测试的重要组件。
由于所用采存模块为6 通道采集存储,所以,该系统用2 个采存模块,分别为采存模块A 采集MIMU 的6 路数据,采存模块B 采集大量程的加速度计和陀螺仪,如图3 所示。当飞行初始时刻系统瞬时具有高加速度和高转速,电机滞后很大,所测数据超过MIMU 量程,此时采用大量程加速度计和陀螺仪数据,当载体转速不断下降,电机工作于低速状态,趋于稳定,此时采用MIMU 数据,将各量程的惯性传感器的数据组合得到弹体的各个阶段的飞行数据。

图3 系统硬件设计原理图Fig 3 Hardware design principle diagram of system
2.2 A/D 转换模块设计
TI 公司的ADS8365 主要特点有:6 通道并行输入;芯片内部具有可选的FIFO 工作模式;16 位的A/D,采集精度高;正常工作时功耗仪为200 mW,功耗低。
ADS8365 有6 个模拟输入通道,分为A,B,C 三组,每组包括2 个通道,分别由/HOLDA,/HOLDB,/HOLDC 启动A/D 转换。ADS8365 的时钟信号由外部提供,转换时间为20 个时钟周期,最高频率为5 MHz,在5 MHz 的时钟频率下,每个通道的总的转换时间为4 μs。数据输出方式很灵活,分别由BYTE,ADD 与地址线A2,A1,A0 的组合控制。转换结果的读取方式有三种:直接读取、循环读取和先进先出(first in first out,FIFO)方式[6]。
2.3 FPGA 控制模块设计
本系统中采用的 FPGA 是 Xilinx 公司生产的XC2S30E,XC2S30E 是Spartan—ⅡE 系列产品中的一种。由于这种FPGA 采用了低内核电压,这将从根本上减小芯片功耗,从而解决高速工作状态下发热量大的问题。同时其丰富的门阵列资源,也为复杂控制逻辑的实现提供了可能[7]。本设计采存模块中主要用其进行时序逻辑控制,实现信号采集、存储等功能。A/D 转换器,FLASH 的所有控制引脚均与XC2S30 相连,为XC2S30 作为系统核心提供硬件基础。通过输出控制信号使得A/D 转换器采集惯性信息敏感仓中MIMU 输出的加速度和角速度信息,进而将数据在XC2S30 内部容量为1kB 的FIFO 中缓存。XC2S30 通过模拟RS—232 串行通信接口发送转换后的数字量,其经过滑环传输后再由惯性信息采集仓中XC2S30 模拟的串行通信接口接收数字量并将整合后的数据存储到FLASH 中。使用FPGA 作为A/D 转换器和FLASH 的控制器,其高速的数据处理速度与控制速度可以满足系统高采样率和处理速度的要求[8]。
2.4 FLASH 存储模块设计
FLASH 选取的是K9F2G08,用于存储采集到的数据,其工作电压为3.3 V,如图4 所示为电路原理图。

图4 FLASH 存储模块电路图Fig 4 Circuit diagram of storage module of FLASH
SD0~SD7 为数据接口,WE 为写选通;R/B 为READY/BUSY OUTPUT(空闲/忙),当输出为高电平,表示空闲;当输出为低电平,表示忙;WP 为写保护。RDB1,WDB2 为存储时WDB2 导通,由采存端F3.3 供电,RDB1 两端无电压;读数时RDB1 导通,由读数端R3.3 供电,WDB2 两端无电压;FC1~FC8,U12C1~U12C 为去耦电容器。去耦电容器在集成电路电源和地之间有两个作用:一方面是本集成电路的蓄能电容;另一方面旁路掉该器件的高频噪声[9]。
3 实验验证
将半捷联惯性测量系统置于高速飞行仿真转台上模拟高速旋转的武器弹药飞行试验(如图5 所示),实验过程系统偏航角始终保持0°,俯仰角从45°匀速变到-45°滚转轴转速图如图6 所示。

图5 高速飞行仿真转台实验Fig 5 Experiment of high speed flight simulation turntable

图6 滚转轴转速图Fig 6 Revolving speed diagram of wobble shaft
通过对实验数据进行上位机读取,首先分析了原始数据的正确性。由于所用MIMU 陀螺x 轴量程为300°/s,飞行初始阶段测得数据超过其量程,转速如图7 所示。

图7 超量程转速图Fig 7 Revolving speed diagram of over-range
通过相关姿态算法解算,得到半捷联惯性测量系统在高速飞行仿真转台试验中的姿态信息如图8 所示。
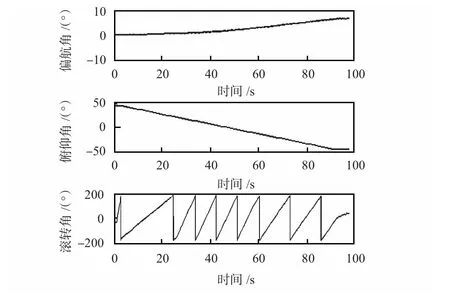
图8 系统的姿态信息Fig 8 Attitude information of system
将超量程数据进行组合后,通过Matlab 软件可以绘制出x 轴的角速率信息图,如图9 所示。
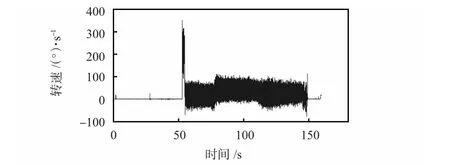
图9 组合数据转速图Fig 9 Revolving speed diagram of combined data
由相关姿态算法解算,得到半捷联惯性测量系统组合数据的姿态信息如图10 所示。
试验过程中偏航角保持不变,由所测数据超量程时,解算可得出系统在80 s 时的偏航姿态角误差为5°。对系统数据进行组合后由图可得出系统在80 s 时的偏航姿态角误差为0.6°。该试验结果表明,该系统能很好的弥补武器弹药初始飞行时刻的惯性传感器超量程问题,提高惯性测量系统的精度,能完整准确的记录半捷联惯性测量系统的姿态信息。
4 结束语

图10 改进系统的姿态信息Fig 10 Attitude information of modified system
本系统采用多量程的惯性传感器和MIMU组合将弹体各个飞行阶段的数据进行测量,通过FPGA 模拟通信口接收数据并存储在FLSAH 中,实现对半捷联惯性测量系统的实时记录,能很好地解决武器弹药飞行初始时刻惯性传感器超量程问题,通过高速飞行仿真转台组合数据分析处理实验验证,该设计能实时准确采集并存储弹体各个飞行阶段的信息,对试验过程中系统的飞行姿态、位置、速度等相关参数的准确分析具有重要的意义,对常规弹药的制导化具有很大的应用价值。
[1] 李 杰,刘 俊,张文栋.微惯性测量装置[J].仪器仪表学报,2006,27(6):1450-1451,1462.
[2] 李 杰,马 幸,刘 俊,张文栋.小型惯导系统数据实时采集处理与存储设计[J].中国惯性技术学报,2008(6):274-277.
[3] 朱海荣,李 奇,顾菊平.扰动补偿的陀螺稳定平台单神经元自适应PI 控制[J].电机与控制学报,2012,16(3):34-36.
[4] 李 杰,洪惠惠,张文栋.MEMS 微惯性测量组合标定技术研究[J].传感技术学报,2008(21):1169-1173.
[5] 岳凤英,高松山.MEMS 惯性测量组合在无人机飞行参数测量中的应用[J].火力与指挥控制,2009(34):174-176.
[6] 赵位桦,姜 力,赵大威.基于DSP 的多自由度假手电气控制系统的研究[J].传感器与微系统,2008,27(1):118-120.
[7] 张 松,李 杰.半捷联MEMS 惯性测量装置数据硬回收系统设计[J].传感技术学报,2013,26(9):1219-1223.
[8] 张少华,李锦明,苏树清.基于FPGA 的双光幕测速系统设计与实现[J].传感器与微系统,2015,34(2):92-94.
[9] 杨志勇,文 丰,郝晓剑.基于Flash 存储器的抗高过载电子记录器关键技术研究[J].国外电子测量技术,2009,28(7):27-29.
