红外图像传感器成像动态模拟系统设计
2015-03-30史建业徐定科
张 建,史建业,徐定科
(浙江大学 生物医学工程与仪器科学学院,浙江 杭州310027)
0 引 言
红外图像传感器成像可得到丰富的目标图像数据,在军事、民用等领域均取得了广泛的应用[1]。红外图像传感器的成像过程依赖于实时探测,存在成本较高、探测条件苛刻等问题。在实际应用中,常采用成像模拟装置仿真生成红外图像传感器探测的图像,既可降低成本满足需求,又可为红外图像传感器的性能分析和设计提供依据[2]。
由于红外图像传感器探测的环境是不断变化的,成像模拟系统的图像仿真生成需达到较高的帧频和分辨率,保证动态实时模拟出红外图像传感器的探测图像[3]。2008 年,中国科学院上海技术物理研究所的陈元林、汤心溢等人研制了一种实时动态图像传感器成像仿真器,可以50 fps 的帧频实时产生分辨率为320×240×16 bit 的图像[4]。2010 年,西安电子科技大学的林凯研究了一种模块化实时红外图像传感器成像仿真系统,可以73 fps 的帧频实时产生分辨率为256×256×16 bit 的红外图像[5]。
本文设计了一种红外图像传感器成像仿真系统,通过在数字信号处理器(digital signal processor,DSP)上运行红外云图产生算法,可动态模拟红外图像传感器探测的图像并上传到电脑。仿真结果表明:本系统可以76 fps 的帧频实时模拟产生分辨率为512×512×16 bit 的红外图像并上传到电脑,图像质量良好,红外图像传感器成像模拟效果显著。
1 红外图像传感器成像简介
红外图像传感器可探测红外辐射并转换为图像数据,主要由三个部分组成:光学系统、探测阵列、信号处理电路三部分组成,框图如图1 所示。
其中,红外辐射输入量首先经过光学系统的聚焦,聚焦后的辐射量经过探测阵列器件完成辐射量到电信号的转换。探测阵列输出的电信号量较微弱,需经信号处理电路进行放大处理,以像素灰度数字量的形式输出。

图1 红外图像传感器框图Fig 1 Block diagram of infrared image sensor
红外图像传感器成像的优势在于实景探测,可以得到目标物体的实时红外辐射图像数据,精度高,还原度好。但红外图像传感器价格昂贵,实际探测过程受外界条件限制且需要消耗大量的人力、物力,限制了其应用范围,常采用成像模拟系统仿真产生红外图像传感器探测的红外图像。目前红外图像传感器成像的图像分辨率可达1024×1024以上[7]。未来,红外图像传感器探测的分辨率将得到进一步提升,针对红外图像传感器成像的仿真系统的发展仍然滞后,亟待突破。
2 系统软硬件设计
2.1 系统概述
红外图像传感器的探测目标有建筑物、天空、地面等,本文以天空为研究对象,实时模拟天空的红外图像。红外图像传感器探测的图像分辨率较高且处于变化的过程,动态模拟系统产生的红外图像的帧频和分辨率需提高,以更好地模拟出红外图像传感器的成像过程。系统的硬件以DSP 为核心处理器实时计算生成红外天空图像数据,产生的数据经USB3.0 接口上传到电脑,为保证图像数据的传输质量,采用DDR3 作为高速数据缓存。系统的总体框图如图2 所示。
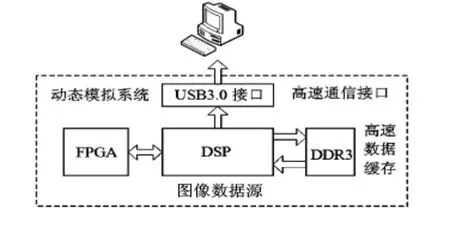
图2 总体框图Fig 2 Overall block diagram
图2 中,DSP 为模拟图像数据源,实现天空红外图像的动态模拟生成。系统可以76 fps 的帧频模拟分辨率为512×512×16bit 的红外图像传感器探测数据,每秒产生的图像数据量为38 MB。DDR3,USB 3.0 等通信接口的数据传输速率均高于38MB/s,保证红外图像数据的高速传输。
2.2 系统硬件设计
系统的硬件电路按照功能可分为计算单元和高速通信电路,其中,计算单元采用DSP+FPGA 的架构,高速通信单元包括USB3.0 接口、DDR3 高速数据缓存模块等。其中,红外图像传感器成像动态模拟系统的图像数据源为DSP,产生的图像数据传输速率高达38 MB/s,高速数据的流向顺序如图3 所示:DSP 产生红外图像数据后,首先将数据缓存到DDR3 中。缓存一定帧数后,DSP 读取缓存的图像数据,并通过PCIE 接口将数据传输到USB 3.0 转PCIE 的桥接器转换为USB 3.0 格式,再通过USB 3.0 接口上传到电脑。为保证图像数据的传输质量,图中的各个环节(DDR3,PCIE 接口、USB3.0 接口)的数据传输速率均大于38 MB/s。

图3 高速数据流向图Fig 3 High speed data flow direction diagram
1)DSP+FPGA 核心架构
本系统的硬件电路采取DSP+FPGA 的架构,其中DSP主要用于实时模拟生成红外传感器探测的图像,选用的是TI 的多核处理器TMS320C6678,共有8 个C66x 内核,八核的总浮点计算能力为160 G 浮点运算每秒(floating-point operations per second,FLOPS),强大的计算能力保证了红外图像的动态产生。FPGA 选用Xilinx V5 系列的FPGA,用于扩展外围接口,控制硬件系统电源上电时序,向DSP 提供复位和中断信号等。
2)DDR3 高速数据缓存
本系统实时传输的数据量较大,为保证数据传输质量,需进行高速数据缓存。缓存介质的读写速率需达到38 MB/s以上,本系统的缓存介质至少缓存1s 的图像数据,缓存器件的存储容量应不小于38 MB。DDR3 采用双倍数据速率技术,在时钟的上升沿和下降沿均可进行数据读写,存取速率很高。本系统选取镁光公司的MT41J256M16RE,存储容量达512 MB,数据位宽16 bit,最高读写速率可达1 600 Mbps,存储容量和存取速率均能满足需求。
3)USB3.0 接口
红外图像传感器成像动态模拟系统可以将红外图像数据通过USB 3.0 接口上传到电脑,TMS320C6678 没有USB3.0 接口,本系统通过USB 3.0 转PCIE 的桥接器将TMS320C6678 的PCIE 接口扩展为USB 3.0 接口,框图如图4所示。其中USB 3.0 的理论传输速率最高可达5 Gbps,PCIE接口的理论传输速率也为5 Gbps,远远高于系统数据流传输速率38 MB/s。
4)高速电路信号完整性设计
DDR3,USB3.0,PCIE 等接口的传输速率很高,容易受到电磁干扰,本系统进行了信号完整性设计,保证信号传输质量:
a.确保高速信号线的上下层都是完整的返回平面,使传输线的阻抗不发生突变。
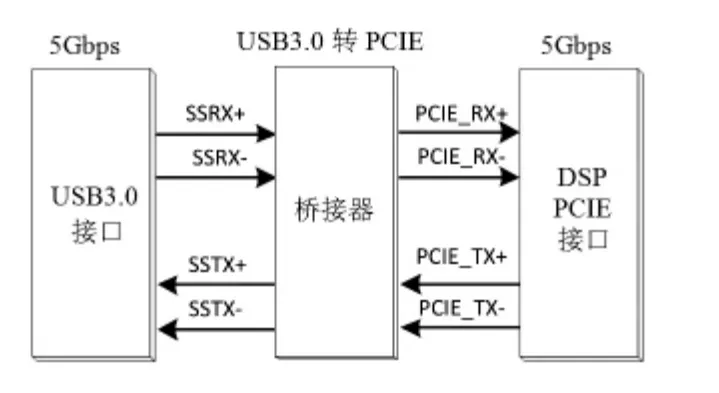
图4 USB3.0 接口框图Fig 4 Block diagram of USB3.0 interface
b.传输线阻抗:单端高速线阻抗均控制为50 Ω,差分高速线的差模阻抗控制为100 Ω。
c.走线规则:避免90°走线,差分线保证等长,高速线之间需要满足3 W 原则,防止串扰。
d.端接匹配电阻:在地址线和控制线的终端端接匹配电阻,消除反射。
2.3 系统软件设计
本系统实时模拟产生天空红外图像,天空红外图像的产生关键在于云图的生成。目前云图的产生方式主要有粒子法、噪声法、分形法等[8]。其中,粒子法的计算量较大,分形法不能产生任意分辨率的图像,本文采用Perlin 噪声法[9]产生红外云图,流程图如图5 所示。
首先设定模拟图像的产生帧频和分辨率,与模拟的红外图像传感器探测的图像帧频和分辨率相同。假设设定的图像分辨率为m×n×16 bit,完成设定后根据图像分辨率产生二维Perlin 噪声数组Noise[m][n],对生成的Perlin 噪声迭代求和N 次,得到Perlin 云噪声图数据Perlin_Noise[m][n],求和公式如式(1)所示

但此时得到的云图轮廓并不明显,需要Perlin 云图进行锐化处理,本文采用指数函数进行锐化处理,可得到更为清晰的云图数据Perlin_Cloud[m][n]。最后进行线性灰度变换,对于每个噪声点,线性灰度变换的公式如式(2)所示

式中 W 为当前噪声点的噪声值,Wmin为所有噪声点中的最小值,Wmax为所有噪声点中的最大值,Gmax为灰度变换后的最大灰度值,即灰度值上限,Gmin为线性灰度变换后的最小灰度值,即灰度下限。灰度变换完成即得到模拟红外云图。
3 仿真实验
本文在CCS 的环境下运行红外云图产生算法,模拟产生分辨率为512×512×16 bit 的红外云图。模拟产生的红外云图像如图6(a)所示,其中最暗点的灰度值为0,最亮的点的灰度值为65 535,图中像素点颜色的深浅表示云层的厚度,颜色越浅的像素点,云的厚度越厚。红外图像传感器实际探测的红外云图如图6(b)所示。从图中可看出:系统仿真的云图形状和实测的云图形状类似,可明显看出:云的轮廓。此外,实测系统每秒可产生76 帧红外云图,帧频较高,动态性好,对红外图像传感器成像的动态模拟效果显著。
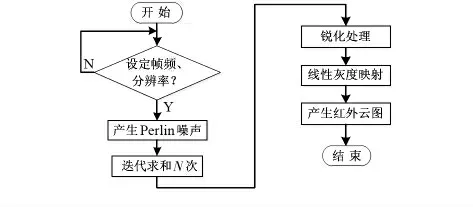
图5 红外云图像产生算法流程图Fig 5 Flow chart of infrared cloud image generating algorithm
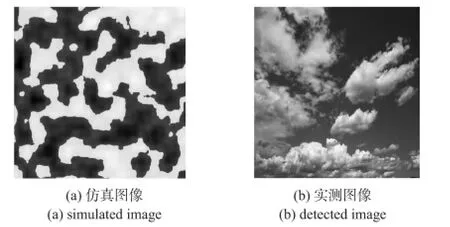
图6 红外云图像Fig 6 Infrared cloud image
4 结 论
本文设计了一种红外图像传感器成像动态模拟系统,为模拟产生红外图像传感器探测的天空红外图像,进行了软硬件设计。通过在多核DSP 上运行红外云图产生算法,动态模拟产生红外图像传感器成像仿真数据,图像数据在DDR3 缓存后经USB3.0 接口上传到电脑。实验结果表明:本系统可以76 fps 的帧频实时模拟产生分辨率为512×512×16 bit的红外云图,图像质量良好,且与红外图像传感器探测的云图形状相似,对红外图像传感器成像的动态模拟效果显著。
[1] 程 瑶,鲁 进,孟丽娅.红外图像传感器成像仿真系统设计[J].液晶与显示,2013(5):788-792.
[2] 娄树理,张 健,任建存,等.红外成像传感器建模与仿真技术研究进展[J].红外,2014(7):1-4.
[3] Sanders Jeffrey,Brown S,Scott D.Utilization of DIRSIG in support of real-time infrared scene generation[C]∥Aero Sense 2000,Orlando,USA,International Society for Optics and Photonics,2000:278-285.
[4] Yu Yang,Tang Xinyi,Cai Haijiao,et al.3D simulation of realtime infrared scene based on DSP[C]∥International Conference on Computer Science and Software Engineering,Wuhan,China:IEEE,2008:915-918.
[5] 林 凯.一种模块化实时红外场景仿真系统研究[D].西安:西安电子科技大学,2010.
[6] 简献忠,裴云天,孙胜利,等.MCT1024 红外焦平面阵列成像传感器[J].激光与红外,2001(5):284-285.
[7] 常 丽.基于分形几何的动态云模拟及纹理分割算法的研究[D].秦皇岛:燕山大学,2010.
[8] 齐 越,段米毅.基于Perlin 噪音绘制云的方法[J].系统仿真学报,2002,14(9):1204-1207.
