基于Pinnacle的对流层延迟改正模型分析
2015-03-30杜顺季
杜顺季
(广州市城市规划勘测设计研究,广东 广州510060)
一、引 言
GPS静态测量技术已经成为建立城市及工程测量基本控制网的主要手段。GPS测量中的对流层延迟一般指卫星信号在通过高度为50 km以下的没有被电离的中性大气层时所产生的信号延迟[1]。对于GPS信号而言,由于波长太长,在对流层几乎不存在色散效应,因而不能采用双频改正的方法来消除对流层延迟[2]。目前,GPS数据处理主要采用两种方式减小对流层延迟影响:参数估计法和模型法。
参数法将对流层延迟改正在数据处理中当作未知参数,通过平差计算来估计精确值。模型法通过建立数学模型计算对流层延迟,目前常用的对流层模型计算方法分为直接法和利用映射函数计算[3],直接法有Hopfield模型、Saastamoinen模型、Black模型等,利用映射函数方法用天顶延迟值与卫星高度角的投影函数两部分乘积求得。
二、Pinnacle中对流层模型
Pinnacle为托普康GPS接收机的配套数据处理软件,界面可视化,操作便利。基线解算主要通过设置基线和卫星的引擎(Engine)完成,不同的面板设置观测值组合模型、卫星时段、截至高度角和对流层模型等[4]。本文采用软件版本为V1.07,提供对流层改正选择有以下5种:不采用对流层模型(Don’t Apply)、Goad-Goodman模型、Neill(1996)模型、Neill(2005)模型、UNBabc(2003)模型。
1.Goad-Goodman模型
该模型又称为改进的Hopfield模型。Hopfield大气模型是一个较为简单的大气模型,建立的前提是假设气体处于流体静力学平衡中,遵从理想气体规则,重力加速度为常量,与高程无关,折射率N分为干湿两项,并表示为离地高度的四次方函数,作为常用的计算模型,国内外学者提出多种改进的模型,Goad-Goodman提出适用于任一高度的改正模型,实现原理见文献[5]。
2.Neill(1996)模型
该模型是Neill在1996年,利用全球26个探空气球站的资料建立的一个全球模型,又称为NMF模型,是连分式映射函数模型,其值只与测站的纬度、高度和观测日期有关,并且认为大气层分布随着时间周期性变化。投影函数包括干分量投影函数和湿分量投影函数两部分,以15°和75°为纬度分界值应用不同公式计算,具体的计算公式在文献[1]中已详细叙述。Neill 1996模型精度较高,曾被广泛应用,在中纬度地区效果较好,但是该模型没有考虑经度因素,在高纬度和赤道地区效果欠佳[1]。
3.Neill(2005)模型
该模型又称为GMF(global mapping function)模型,基本的对流层改正模型同NMF模型一样,附加了ECMWF数值气象模型,将年积日、经度、纬度、高程作为输入参数,按照与年积日有关的内插函数进行内插获得相应的模型系数值。采用了ECMWF 40年观测数据的重新分析结果,提高了映射函数的精度,降低了NMF的区域性高程误差和年度误差。
4.UNBabc(2003)模型
该模型为加拿大新布伦瑞克大学创建的对流层改正模型,同样是以连分式映射函数为基本模型,与NMF函数形式相近,采用北美地区1992—1995年5年间的51个无线电探空测站数据,确定模型中的a、b、c 3个参数。该模型可以适用于卫星高度角低至2°,且该模型具有结构简单,使用方便等特点。
三、实测数据的基线结果分析
本文应用Pinnacle软件对广州市南部某区的D级GPS城市控制网观测数据进行处理,外业数据的采集按照规范[6]要求执行,采用天宝双频接受机,卫星截止高度角为15°,时段观测时长超过1 h。基线处理模型设置为软件自动选择。文中为方便数据对比,将5中模型分别简述为无模型、G-G模型、Neill93模型、Neill05模型、UNBabc模型,同一基线除了对流层模型更改外,其余的参数,如卫星高度角、时段编辑、某卫星是否禁用等处理均保持一致,对处理结果进行分析。
1.不同模型解算基线结果分析
选取6条不同长度的基线数据进行解算,不同模型的解算残差见表1,基线长度见表2。

表1 不同模型计算的基线残差表 mm

表2 不同模型计算的基线长度表 m
从表1可以看出,随着基线长度增加,解算结果的残差变大,在10 km以内的基线,残差可以达到1 cm精度,在本项目的基线解算中也是按照该指标进行基线结果的精化。从计算的结果上看,相比于不采用对流层模型,使用模型后解算出的基线长度均变小。对比表1和表2,Goad-Goodman模型与Neill2005模型、Neill1996模型与UNBabc模型的基线残差和长度结果一致。同一条基线,采用不同的模型解算,基线残差也就是内符合精度相当,但是基线长度有一定偏差,超过10 km的基线,采用对流层模型和不采用模型长度较差有2.5 cm,40 km时可达5 cm,需进行对流层延迟改正,消除粗差。5 km以内的基线仅使用差分模式解算基线也能够达到不错的效果。
2.与已知基线对比分析
项目提供了部分二等点、C级点和广州CORS系统基准站点作为起算点,根据这些高等级的已知点广州平面坐标可以反算基线三维空间长度,起算点概略高程采用广州市似大地水准面精华成果,由WGS-84大地高计算广州高程,绝对精度可达到5 cm[7],根据误差传播定律,对于超过1 km的基线,长度计算结果的影响可以忽略不计。通过已知长度基线的外符合精度比较,能全面地分析基线解算结果。
Pinnacle软件中,除了选择对流层模型外,还有两个选项可以设置,即是否估计天顶对流层延迟和是否使用默认气象参数。上文已经得知在广州南部平原地区有些模型之间结果一致,因此选用Neill2005模型和UNBabc模型进行分析,因此该部分共分为5种解算策略:不采用对流层模型;采用默认气象参数的Neill2005模型;采用默认气象参数的UNBabc模型;采用定义气象参数的Neill2005模型;采用定义气象参数的UNBabc模型。默认气象参数在软件中设置为温度T=20℃,大气压P=1 013.25 mba,湿度e=50%,由于在施测过程只要求记录天气状况,无须测量气象元素,自定义的气象值采用测区附近的气象自动观测站数据,选用观测时段内较为炎热的一天的气象值,具体值为T=35℃,P=1005 mba,e=80%,该气象值和标准气象值有较大差异。以反算的基线长度为参考值,不同方法解算的基线长度较差如图1所示。
图1纵轴为解算结果的基线长度和坐标反算的长度较差,横轴为5条不同长度的GPS基线,长度从1.5 km至51.7 km,5个直方图分别代表不同的解算方法。从图1可以看出,如果不采用模型估计,对1.5 km的基线影响不大,短基线两端的空间相关性强,直接差分可基本消除大气影响,但是其余4条基线较差都超过25 mm,对22.4 km的基线影响最大,为56 mm,对51.7 km的基线反而相对较小。使用差分法解算基线,差分的过程便可消除部分对流层的影响,这部分值也就是差分后的残差值,与基线两端的气象和观测卫星分布有关,从数值上没有明显的规律,并不是基线越长差分后的残差越大,对于超过2 km的基线应该采用对流层模型改正,特别是51.7 km的长基线,模型改正后较差不足10 mm,为不改正时的28%,相对精度可达0.01×10-6D,所有的基线使用模型改正后最弱边相对精度可达0.18×10-6D。
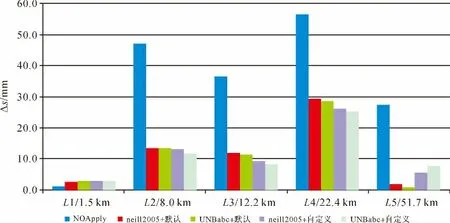
图1 不同解算方法基线长度较差对比
使用对流层延迟模型改正过程中,是否采用标准气象参数进行改正的差异不大,对51.7 km的基线使用自定义气象参数后的较差反而比用标准参数的较差值有明显的增大,其余几条基线是否采用标准气象值的差值变化在3 mm以内,采用标准气象值也可以达到较好的改正效果。采用标准气象元素法的关键在于:不怕测区中进行同步观测的各站都含有系统的气象误差,但只要它们的差值的误差不大即可,系统的气象误差将使各站产生大体相同的绝对天顶对流层延迟,但一般不会引起较大的相对延迟误差,上述尺度误差是允许的。图1中的基线,使用自定义气象参数后引起的尺度误差,最大值为2.9×10-7,也完全满足C级网10-6的精度要求。
四、结 论
根据规范[6],在城市及工程测量的GPS控制测量中,应满足C级GPS测量的精度要求,C级网平均边长为20 km。本文采用实测数据进行处理分析。结果表明,采用Pinnacle软件进行基线处理满足普通等级控制网的精度要求,基线越长,解算结果中误差越大,10 km以内的基线,解算中误差应尽量控制在10 mm以内。软件采用差分模式进可削减对流层影响,但差分后对流层影响依然存在,20 km的基线不使用对流层模型残差可达60 mm,解算基线时建议应该选择对流层模型进一步减少对流层误差。在平原地区,Pinnacle提供的对流层模型中,Goad-Goodman模型和Neill2005模型计算结果相当,Neill1996模型和UNBabc2003模型结果相当,50 km内不同模型之间的差异在3 mm以内,差异并不明显,可采用较新的Neill2005或UNBabc2003模型解算。差分模式下,是否使用实测气象参数值对结果影响很小,尺度影响在10-7量级,测量的气象值也会有代表性误差,因此可直接采用标准气象值计算,减轻外业测量和数据处理的工作。
[1] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2010:86-95.
[2] 王新龙,李亚峰.GPS定位中4种对流层延迟修正模型适应性分析[J].电光与控制,2008(11):5-9.
[3] 赵铁成,韩曜旭.GPS定位系统中几种对流层模型的探讨[J].全球定位系统,2011(1):46-52.
[4] 北京合众拓普科技发展有限公司.Pinnacle软件用户手册[EB/OL].2015-03-12.http:∥wenku.baidu.com/view/8c28b9325a8102d276a22f4a.html.
[5] 陈招华.区域精密对流层延迟模型建模[D].长沙:中南大学,2010.
[6] 中国国家标准化管理委员会.GB/T 18134—2009全球定位系统(GPS)测量规范[S].北京:中国标准出版社,2009.
[7] 周平红,蒋利龙,李军国.GZCORS-RTK高程精度稳定性分析[J].全球定位系统,2012(6):64-69.
