基于GPS/GIS车辆行驶安全预警研究
2015-03-30张伟朋杨志强贺凯盈
张伟朋,杨志强,贺凯盈
(长安大学测绘与空间信息研究所,陕西 西安710064)
一、引 言
当今科技发展迅速,行车安全问题很突出,近两年无人驾驶技术被广泛关注,但是由于安全、法则等种种原因使之不能很好地被推广。由于很多地区道路设计受到恶劣地形条件的限制,道路环境很差,很多都达不到标准,甚至成为所谓的死亡路段。研究行车安全预警对驾驶员的行车安全及无人自动驾驶系统都有很现实的意义。
二、行驶车速作为预警研究参数的确定
车速是车辆在公路上行驶时对道路线形最直观的反映,是道路线形和驾驶员主观期望共同作用的结果,也可以说是交通环境和驾驶员主观心理等各种因素的综合产物。在公路线形设计阶段和运营阶段,车速都扮演着重要角色,是联系两个阶段的桥梁[2]。由于线形条件对行驶车辆最直接的影响表现在实际车速上,因而用行驶车速作为道路线形安全预警研究指标具有一定的可靠性。另外,在车辆行驶时,通过受力分析来确定车辆在道路上的稳定状态都是离不开车速所产生的影响,这就使得行驶车速作为预警参数更加肯定。
1.平曲线段车辆横向稳定性约束条件
车辆在公路平曲线段行驶时,横向稳定性问题主要是横向滑移和横向倾覆。由于现代汽车在设计时一般轮距较宽、重心较低,车辆在曲线上行驶时,在发生横向倾覆之前先产生横向滑移现象。在通常情况下,只要满足横向滑移稳定条件,倾覆稳定条件也能满足,除非车体很高而轮距较小,离心力所产生的横向力矩达到倾覆力矩。为了保证平曲线段车辆稳定性,只需将车转弯时抗滑移稳定性条件得出的安全速度临界值作为车辆横向稳定性约束条件[3]。
平曲线段,由于离心力的存在,车辆的受力情况比较复杂(如图1所示),可得超高方向上保持车辆横向稳定性的约束条件为

式中,fH、θ、R、m、g分别为路面横向摩擦系数、横向倾角(超高坡度)、平曲线半径、汽车质量和重力加速度;符号分别对应正常超高与反超高两种情况。
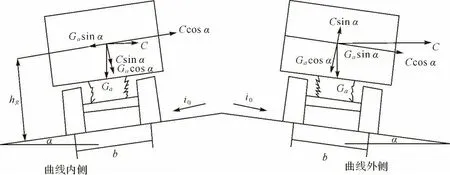
图1 汽车在曲线上行驶所产生的横向作用力
根据式(1),可得到下式

式中,υ是以m/s作为单位的,将其化为以km/h作为单位,则上式化为

式(3)等号表示半径R、超高横坡坡度ic、路面横向摩擦系数fH与临界侧滑速度υ的关系。
2.路面摩擦系数的确定
温度和湿度的变化是使路面状态及摩擦性能发生明显变化的因素。受雨雪雾天气及货车制动洒水影响时,道路表面可能产生水、雪、冰等覆盖物,形成潮湿、积水、积雪、结冰等不同的路面状态。根据试验调查与经验总结,可将路面状况分为6种类型,其路面摩擦系数的确定方法见表1,纵向摩擦系数取fL=(0.7-0.8)f,横向摩擦系数取fH=(0.6-0.7)f[4]。
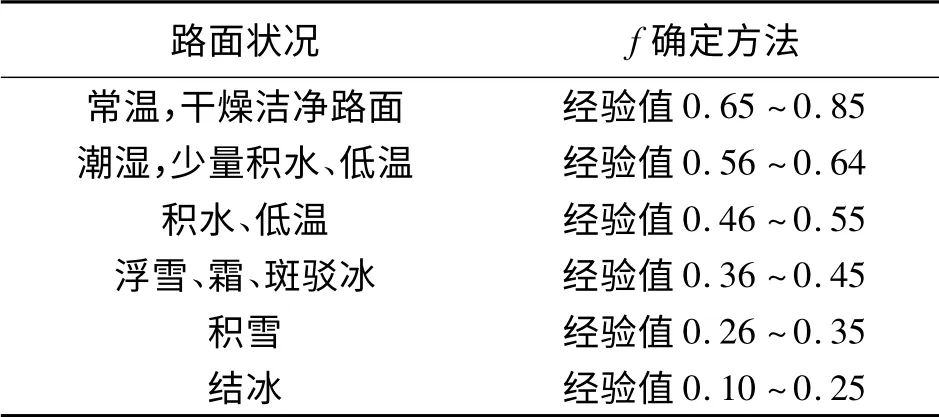
表1 不同路面状况下路面摩擦系数的确定
3.汽车速度约束条件确定
图1为汽车在曲线上行驶所产生的横向作用力,横向力Y为

通常α角很小,因此cosα≈1,sinα=tanα=io
式中,“+”表示路拱双坡外侧;“—”表示路拱双坡内侧;α为路拱横坡坡角,一般很小;io为路面横坡坡度;C为离心力,其计算公式为

因此

因此
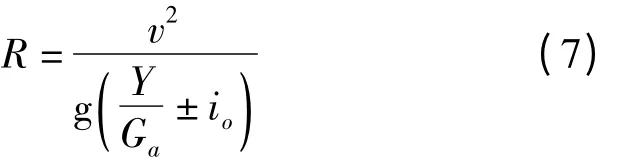

由上式可知,R、v值不取决于Y的绝对值,而取决于Y/Ga,即取决于单位重量的相对横向力值。取μ=Y/Ga称为横向力系数,带入式(8),得

在道路上行驶的汽车,当其位于一段曲线上的某一个点时,其超高横坡度、曲线的半径是确定的,根据u值与乘车人感觉及耗油,μ值取0.15,此处υ是以m/s作为单位的,将其化为V以km/h作为单位,则式(10)变形得汽车的极限行车速度为

式中,R为曲线半径,单位m;μ为横向力系数;io为超高横坡度。
三、系统总体设计
本系统是希望在车辆行驶过程中,首先要将道路划分成不同的线形类型。在驾驶员的角度,根据道路的线形设计以实际速度为依据,与根据道路各项参数所确定的危险速度做比较,对驾驶员进行实时提醒警告,以便使其安全行驶。其总体设计过程如图2所示。
导航定位系统主要有GPS导航技术、惯性导航技术、轨迹推算技术定位等。数据采集及数据库建立主要依赖于成熟的GIS技术。目前主要的GIS产品均提供GPS接受功能,可直接通过GPS设备获取坐标信息并显示在地图上,并具有数据分析、数据管理、地图投影、数据发布的能力[6]。
系统先通过GPS导航系统将车辆当前所在的位置,然后通过坐标转换将GPS采集的坐标与道路坐标相统一。在GIS系统中匹配所在道路的线形信息,从而确定道路在此处的参数(数据采集系统获得),然后根据GPS测得的速度进行行车安全分析。当发现可能接下来会发生危险,马上报警,并提醒驾驶员(或者车辆自动驾驶系统)应该怎么操作[7]。
四、行车安全分析系统具体内容
此处的设计是将当前实测速度与根据道路参数等计算的最大侧滑速度与道路设计中的考虑驾驶员心理的速度进行比较,从而做出预警。当实测速度v>侧滑速度v2时,就发出警报,并提醒赶紧减速;当实测速度v1>考虑驾驶员心理的速度v3时,提醒驾驶员减速,以便平稳舒适行驶[5]。程序设计执行过程如图3所示。
五、结束语
道路线形安全主要与道路线形、人、环境等有关系,而道路线形的设计主要考虑车速影响。本文是在参读很多资料后对判断道路线形安全影响的参数进行最后确定,很明显车辆行驶速度是最直接和最可靠的标准。在道路设计中有很多的速度概念以确保道路设计的合理性,而本文就是将车辆的实际行驶速度作为判断量,并且对车辆进行受力分析,得出基于实际车速来预警的模型。
车辆行驶安全包含了很多方面的因素和内容,本文所述将GPS定位导航与GIS系统结合对车辆速度、道路线形等进行研究的基础上进行的初步设计。要达到很好的效果,必然要与车辆生产技术、动力学、交通工程、人体视觉以及心理学联合研究。希望以后在各研究领域的学者在各学科融合的基础上能够有更深入的研究。
[1] 丁玲.公路线形设计与行车安全的关系[J].交通世界:运输,2011(5):126-127.
[2] 高建平,郭忠印.基于运行车速的公路线形设计质量评价[J].同济大学学报:自然科学版,2004,32(7):906-911.DOI:10.3321/j.issn:0253-374X.2004.07.014.
[3] 刘丹.基于GIS的道路交通安全评价与预测方法研究[D].北京:北京交通大学,2012.
[4] 杨梅.公路线形因素对交通安全的影响分析[D].西安:长安大学,2009.
[5] 林志英.道路线形条件对交通安全的影响分析[D].长沙:中南大学,2010.
[6] 黄文卿.基于可能速度的路线线形设计质量评价研究[D].武汉:武汉理工大学,2008.
[7] 翟战强,蔡少华.基于GPRS/GPS/GIS的车辆导航与监控系统[J].测绘通报,2004(2):34-36.
[8] 马俊海,黄明.车辆监控系统中GPS,GIS,GSM的应用[J].测绘通报,2002(10):34-36.
[9] 赵琳琳.道路线形安全评价方法研究及应用[D].昆明:昆明理工大学,2012.
[10] 郭凤香.道路线形安全分析与评价[D].昆明:昆明理工大学,2005.
