4G网络在无人驾驶智能车远程监控系统上的应用
2015-03-28谭宝成曹国浩
谭宝成,曹国浩
(西安工业大学电子信息工程学院,陕西西安710032)
远程监控系统是具有尖端科技领域的全球卫星定位系统(GPS)、通信技术、互联网技术和其它应用领域的有机结合。远程监控系统所涉及的核心技术中,数据传输技术是最关键技术,它决定了系统的实时性、可靠性和容错性[1]。4G网络的发展改变了通信网络的格局,传输速度快,已成为网络通信首选的目标。
1 无人驾驶智能车监控系统的原理结构
本系统主要由无人驾驶智能车(数据终端)、服务器、控制端和监视端组成[2],采用服务器端和客户端模式。工作原理是无人驾驶智能车通过4G网络把车上的信息传送到服务器上,于此同时服务器会把无人车的信息通过4G网络传送到监视端和控制端,控制端的操作人员根据信息对无人驾驶智能车做出相应的操作。图1显示了远程监控系统原理结构。
在远程监控系统中,无人驾驶智能车的信息主要由惯导(GPS)定位出无人车的航向、速度、经纬度,方向盘上的编码器采集车方向的偏转角度,无人车上的摄像头采集图像信息和传感器判断障碍物、路沿和电池信息。
2 无人驾驶智能车网络通信功能
1)网络通信的选择
当今社会高速发展,人们的要求也普遍变高。在中国很多地方,有线传输变得相当困难,而且费用比较昂贵。无线代替有线传输已经成为一种趋势,并且无线传输灵活。无线传输的种类比较繁多[3],例如,红外线、蓝牙、现在热衷的WIFI、UWB、Zigbee这些无线传输适合短距离传输,传输速度快,其中UWB传输速度可达数百Mbps,这些只适合我们在小范围使用。而无线数传电台、GSM、GPRS和3G传输距离较远,无线数传电台可传输十几公里,但是成本高、标准不统一。GSM、GPRS和3G无线传输的距离就非常远,只要是基站覆盖到的地方都可通信。三者中3G网络传输速度最快,可达到2 Mbps,但是我国3G面临着致命的缺点:就是移动无线接入网络的空中接口不统一,易造成通讯混乱。4G网络简称第四代移动通信及其技术,它融合了3G和WLAN,可以传输高质量的视频图像,且图像的高清质量和程度与我们在家里看高清电视图像相同;它下载、上传和上网速度都比较快,其中下载速度可达到100 Mbps,上网速度比拨号上网快2 000倍,上传速度达20 Mbps;它还可以满足不同用户的各种不同需求[4]。无人驾驶智能车在马路上行驶时,会出现一些障碍物或者故障。如果及时把信息传送并最终显示在监视端和控制端上,控制端的操作人员便可以及时地对无人驾驶智能车做出决策,从而避免一些问题的产生。在信息传送过程中,根据4G的特点,可以达到上述要求。综合对比,本文无人驾驶智能车远程监控系统选用4G网络。

图1 远程监控系统原理结构图Fig.1 Principle structure of remote monitoring system
2)网络通信协议
本系统是在Winsock控件下进行VB编程,TCP和UDP是目前众多通信协议中使用最为广泛地传输协议。TCP协议允许创建和维护与远程计算机的连接,连接之后,计算机之间就可以把数据当作一个双向字节流进行交换,数据传输完成后,还要关闭连接,安全性比较高。UDP协议是一个面向无连接的协议,计算机并不需要建立连接,它为应用程序提供一次性的数据传输服务,不提供差错恢复,不能提供数据重传,传输数据安全性较差。我们日常使用的QQ软件就是UDP协议,经常会出现接收不到信息的问题。鉴于无人驾驶智能车远程监控系统数据传输安全性高的要求,本系统选用TCP协议。
3)网络通信实现
本系统根据VB语言中Winsock控件的属性、方法、事件以及4G网络来实现客户机端与服务器端之间的通信。服务器端程序有3个winsock控件,分别对应于无人车程序上的winsock控件、监视端程序上的winsock控件和控制端程序上的winsock控件。服务器端识别客户机信息主要是客户机的端口号。
连接的工作原理是:首先打开服务器端程序,服务器会不停地监听客户端的请求,一旦客户端向服务器端发出连接请求,服务器就会识别客户端的端口号,识别完成后,就会建立连接,于此同时服务器与客户机之间建立了一条通信信道,直到关闭为止。如果无法识别,服务器就会关闭。连接成功后,便可以发送接收数据。客户机指的是监视端、控制端和无人驾驶智能车。图2显示了服务器与客户机连接流程图。
发送接收工作原理:首先客户机向服务器发送连接请求,一旦服务器响应了客户机发送的连接请求时,就会触发服务器中ConnectionRequest事件,这样就创建了连接。连接成功后,客户机便可以向服务器发送信息,于此同时服务器会根据端口号的信息判断是无人驾驶智能车端的信息还是控制端信息,并将信息分别保存在数据库中,监视端只接收信息。图3显示了服务器与客户机发送数据流程图[5]。

图2 连接流程图Fig.2 Connection diagram
3 无人驾驶智能车远程监控界面
本系统采用远程监控,传输的信息包括数字信息和图像信息。远程监视端界面包括数字信息界面和图像信息界面。图4显示的数字信息界面,图5显示图像信息界面[6]。
在无人驾驶智能车运行时,4G网络会将车辆、障碍物信息以及图像视频信息传给远处的监视端,远处监视端的操作人员了解信息后,做出相应的判断。图6为远程控制界面。
4 4G网络传输问题和分析

图4 数字信息界面Fig.4 Digital information interface

图5 图像信息界面Fig.5 Image information interface
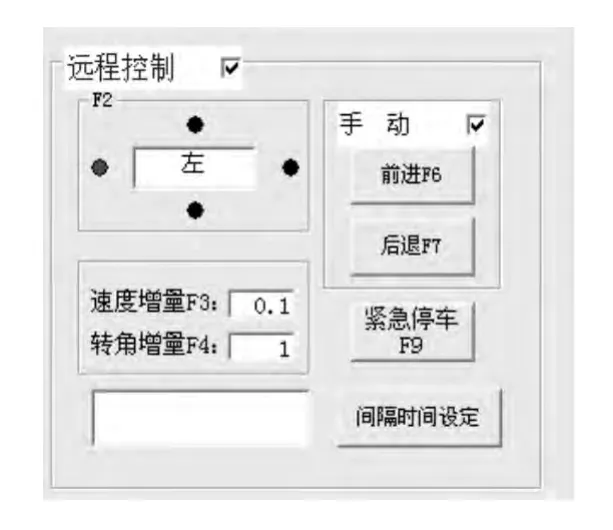
图6 远程控制界面Fig.6 Remote supervision interface
由于图像采集的信息量非常大,4G网络在传输上会出现延时问题,经过测试,延时大概在1.5 s,而3G网络大概在3 s,当然这跟测试的环境有关。数字采集就不会出现网络延时问题。无人驾驶智能车在公路上行驶时,会出现跟车、超车、转弯(弯道行驶)和停车的情况。跟车时,即使出现延时也不会有啥问题,我们会根据车与车之间的距离信息做出车速和方向盘的调整,始终与其他车辆保持在安全间距范围。超车时,我们会先根据前后方车的信息做出判断,是决定超车还是继续跟车,当符合我们设定的超车程序时,无人驾驶智能车就会做出超车反应并进行超车,网络延时也不会出现大问题。转弯时,由于网络的延时,远程监控端的操作人员不能及时看到转弯信息,很容易出现事故。这时,我们会从道路上采集的信息作出判断,那就是在无人驾驶智能车快要进入弯道时,我们会在程序上做出提前转弯的判定而不是等到进入弯道才转弯,这样就可以避免因网络延时造成的事故。停车时,主要靠sick采集车与前方的距离以及UTM采集公路旁的边沿距离,达到我们程序上设定的的停车距离,无人驾驶智能车就会自动停车。由于采集的是数字信息,不会出现延时现象。
5 结束语
4G网络在无人驾驶智能车远程监控系统上的应用融合各方面技术资源对它进行管理、诊断和数据分析,节省了大量的人力、物力和财力。由于4G网络在现阶段技术还不太成熟,覆盖范围还不是很广,无人驾驶智能车在使用上还有一定的局限性。预计不久的将来4G无线通讯技术的不断普及和完善,更多低码率、高品质的图像压缩技术也将产生,这使得无人驾驶智能车监控系统的性能不断的得到提高和完善,那时无人驾驶智能车会更加灵活、可靠和安全,必定会有一番光明的前景。
[1] 张帆.轨道车远程监控系统设计[D].吉林:吉林大学,2010.
[2] 张剑锋,樊晓宋,曹宝健.一种试验车远程监控系统设计[J].工业控制计算机,2009,22(8):33-34.ZHANG Jian-feng,FAN Xiao-song,CAO Bao-jian.A design of remote monitoring system for test vehicle[J].Industrial Control Computer,2009,22(8):33-34.
[3] 陈高锋.常用无线通信技术简介[J].电脑知识与技术,2012,8(5):1062-1064.CHEN Gao-feng.Brief introduction of common wireless communication[J].Computer Knowledge and Technology,2012,8(5):1062-1064.
[4] 任頲.4G无线网络与3G网络的分析对比[J].硅谷,2013(8):105-120.REN Ting.4G wireless network compared with the analysis of the 3G network[J].Silicon Valley,2013(8):105-120.
[5] 邓远宁.基于无线传感网络的独立电网远程监控系统的设计[D].长沙:湖南大学,2013.
[6] 于瑞.智能家庭远程监控系统[D].青岛:青岛科技大学,2013.