摄像头智能车识别路标无线装置实现变速停启
2015-03-27安徽财经大学管理科学与工程学院胡恬恬
安徽财经大学管理科学与工程学院 胡恬恬
引言
本文以飞思卡尔KL25摄像头智能车模为例,探讨摄像头智能车如何识别路标无线实现变速停启及其与已有车辆结合的实用价值。
1 灯塔控制方式及模块原理图
灯塔又发射模块和接收模块组成见图1,发射模块中白色的灯为红外灯,红色为LED灯,额定电压为5V-7.2V,灯塔的模块组装好打开开关,灯塔处于常亮状态即开关控制模式。或者将灯塔组装号后将开关关掉,通过单片机控制EN脚电平的高低状态控制灯塔模块的亮灭,也可将EN脚接入计时器,通过记时方式自动控制灯塔亮灭。
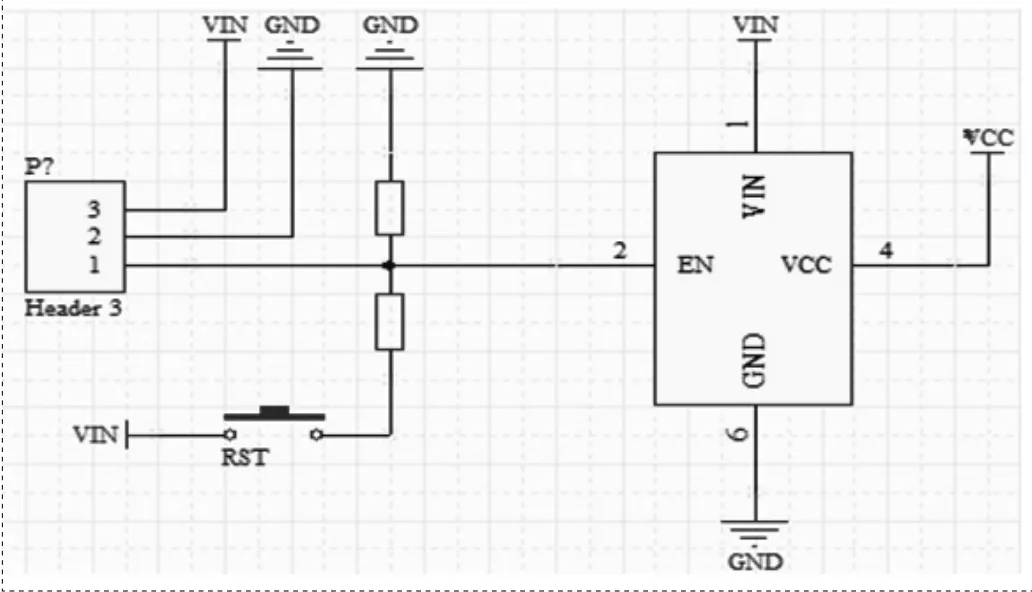
图1
其中40KHz震荡电路加1KHz振荡电路的耦合电路,符合飞思卡尔杯智能车比赛的要求,为了使灯塔信号适应更广泛的红外检测管,在原有的40KHz调制信号上加上了1KHz的调制信号,其中占空比为50,峰值电流20mA。见图2。信号通过与门进入三极管中,控制红外发射LED灯的工作状态。在对信号进行检测时,要在三极管前即接收信号之前进行波形检测,否则可能由于电路的延时作用,只能检测到1KHz的波形。
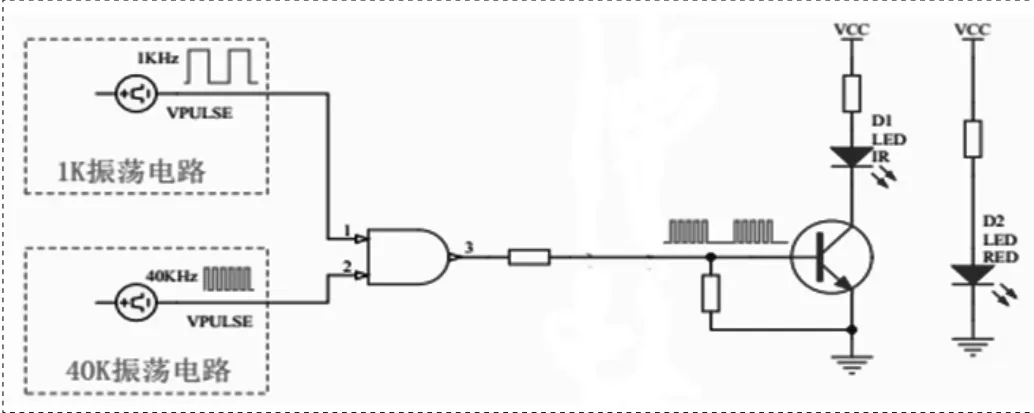
图2
在本车模中灯塔使用HS0038红外接收模块见图3,通过接收灯塔信号产生的方波信号,实现发车灯塔检测的目的。HS0038最高电压为6V,所以VCC可用3.3V或6V,VCC经R4为4.7K的电阻使HS0038的DATA脚处于高电平,D1中没有电流流过,红色发二极管灭。当HSOO38在接收到红外线的情况下,DATA脚处于低电平状态,D1有电流流过,红色发二极管亮。其中接收模块分为单接收模块与双接收模块,因为双接收模块的范围比单接收模块的范围大,而且如果双接收灯塔模块的一个灯塔出现故障,另一个灯塔仍可以继续工作,所以本模块选用双接收模块。
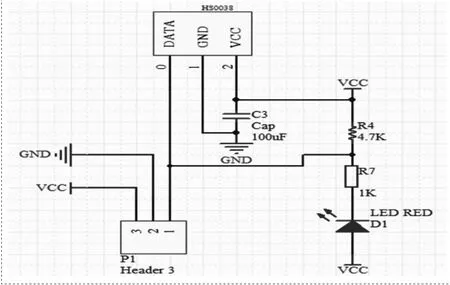
图3
由于大赛要求车模主板上的灯塔接收模块电路需自制,本车模的灯塔接收模块的PCB图如图4所示。引脚一接5V电源,引脚二接地,引脚三接MKL25芯片上PTE20引脚,引脚四接MKL25芯片上PTE21引脚。在MKL25芯片中PTE20引脚与PTE21引脚具有通用异步接收器/发送器UART0_TX、UARTO_RX功能,UART0_TX通过调制TPM1CH0,控制SOPT5_UART0 TXSRC。其中UART具有支持全双工异步,发射器与接收器独立运行的功能,使得无线设备信号的传送效率更快且收、发数据可同时高效的进行。

图4
2 发车区域灯塔控制车模起步与停车
根据比赛的要求,为使灯塔信号适应更广泛的红外检测管,在原有的40KHz调制信号上加上了1KHz的调制信号。比赛前将车模放在发车灯塔前发车区域内,灯塔处于常亮状态,车模检测到灯塔信号。当发车灯塔灯灭后进入记时状态,车模发车运行。发车灯塔灭后5秒后重新点亮,等待车模到达终点。当车模沿着赛道顺利行驶一圈后,行驶到终点附近没有通过计时系统之前,车模检测到发车灯塔上的LED脉冲灯光时,车模减速慢行为刹车做准备。当计时系统检测到车模通过后,发车灯塔灯灭,同时比赛计时结束。车模检测到灯塔灯灭时,应该立即停止。如果车模在灯塔前停下来,比赛正常结束。如果车模停在灯塔后面或者没有停车,比赛时间会加罚1秒。
3 赛道内灯塔控制车模变速
赛道内部先设定一个灯塔,称为变速灯塔,该灯塔要远离发车灯塔防止信号干扰。变速灯塔的频率可由外部电脑控制。在车模的程序中可设定信号为30KHz加上1KHz的调制信号为减速信号,车模在进入变速灯塔区域后,检测到变速灯塔上的LED脉冲灯光为减速信号时,车模速度降低百分之十。在程序中也可以设定信号为20KHz加上1KHz的调制信号为减速信号,对应车模速度可降低百分之二十。同理,在车模的程序中可设定信号为50KHz加上1KHz的调速信号为加速信号,车模在进入变速灯塔区域后,检测到变速灯塔上的LED脉冲灯光为加速信号时,车模速度提高百分之十。车模程序中设定检测到灯塔不同的信号频率时,可将信号划分为已设定好的频率段,控制车模是加速还是减速,速度提高或者降低,提高或者降低比例。
4 利用灯塔控制车模变速停启技术与已有车辆结合的实用价值
对摄像头智能车识别无线路标实现自动停启变速的研究,能实现人通过对路边单片机的控制来控制无线发生装置,进而达到对智能行使的车子外部控制。这是对智能车多功能的一种创新,同时也符合无人车驾驶的创意理念。目前我国研究的无人车智能性已达到很好的研究水平。为了无人车的通用性与安全性考虑,在无人车的设计中也必然会加入路边无线的控制,以达到安全的保障作用。无人驾驶技术难以批准商用,将无人驾驶汽车的部分技术与人工驾驶的车辆结合在一起,已经成为一种趋势。防抱死制动系统、牵引或稳定控制系统、高级泊车导航系统等都可以证明这一点。
结论
本文以MKL25为最小系统的摄像头智能车为例,探讨智能车如何识别路标无线装置控制车模变速、起步与停车及其商业应用价值。事实证明智能车识别路边无限装置控制车模变速停启技术的可行性,该技术的商用价值很高,可以与现有车辆结合起来,使车辆行驶达到更安全可靠的功能。
[1]付少波主编.传感器及其应用电路[M].化学工业出版社,2011.
[2]朱兆优,陈坚,邓文娟主编.单片机原理与应用[M].电子工业出版社,2008.
[3]郭天祥主编.51单片机C语言教程[M].电子工业出版社,2008.
[4]辛晓宁,王晓旭.PWM调制的设计与实现[J].电子设计工程,2013,2(4):122-124.
[5]隋金雪,杨莉,张岩编著.“飞思卡尔”杯智能车设计与实例教程[M].电子工业出版社,2014(1).