基于双秤台汽车衡的车辆动态称重算法
2015-03-27张晓东李丽宏宋艳琴
张晓东,李丽宏,宋艳琴
(太原理工大学 信息工程学院,山西 太原030024)
0 引 言
双秤台汽车衡由于其称量准确、高效等优点,目前已经广泛应用于高速公路计重收费系统。汽车通过秤台时,其作用在秤台上的力除了真实轴重外,还有很多因素产生的干扰,如车速、车辆自身谐振、路面不平、轮胎驱动加速等。经过仔细研究分析发现,轴重信号的噪声有高频部分和低频部分。利用小波变换算法消除高频干扰,对信号进行降噪预处理。针对低频噪声干扰,利用BP 网络算法进行滤波。理论上讲,对于同一种的车型利用神经网络处理动态称重数据,只要采集足够多、足够全的称重数据,通过样本训练总是可以找到一个合适的网络模型,利用该模型计算出被测车辆的精确重量。
针对实际情况中都是不同轴型的车辆过秤,本文提出引进可以识别轴型的专家系统,对于不同轴型的车种使用改进后的BP 网络模型滤波,最终车辆的重量更加接近真实值。
1 小波变换滤波预处理
1.1 双秤台汽车衡
如图1 所示,双秤台动态汽车衡有2 个秤台、8只称重传感器,2 只传感器并联为一组可采集4 路车辆轴重信号并对其进行滤波预处理。
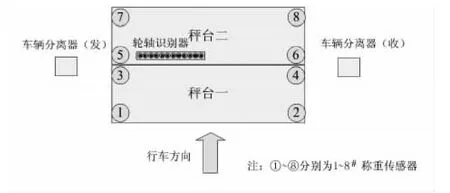
图1 双秤台汽车衡传感器分布结构示意图Fig 1 Structure diagram of sensor of double weighing platform truck scale
1.2 滤波预处理
小波变换对于非平稳的小区域噪声信号具有很好的滤波作用,同时动态称重过程中的噪声频段分布明确,因此,信号中的尖峰和突变能得到很好的处理,从而实现非平稳信号的消噪。经反复实验研究发现,轴重信号可分5 层高频滤波,轴重信号小波分解树示意图见图2。
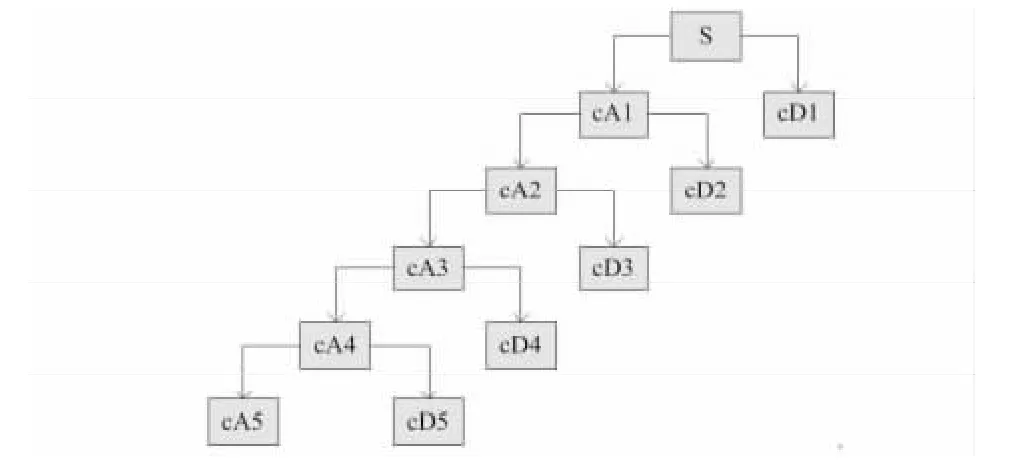
图2 轴重信号小波分解树示意图Fig 2 Schematic diagram of wavelet decomposition tree of signal of axle load
如图2 所示,第1,2,3,4,5 层噪声的高频部分(cD1,cD2,cD3,cD4,cD5)包含了路面不平、发动机转动等因素产生的噪声,可以使用小波变换滤掉以上噪声干扰。
第5 层低频部分(cA5)主要包括轮轴通过秤台时称重传感器的线性变化(即真实轴重信号),速度、驱动力加速对轴重信号的干扰以及车辆的自身谐振噪声,小波变换无法很好滤掉,处理时保留。
完成上述滤波过程后,将小波分解后的各层信息进行小波重构,重构信号即为去掉高频噪声后的轴重信号。
2 轴型识别系统
2.1 传感器输入
如图1 所示,秤台一和秤台二可判断系统是否有轴以及是否联轴,轮轴识别器可判断每轴的轮胎数是单胎还是双胎,最后车辆分离器可判断是否整车通过。系统软件的工作流程见图3。
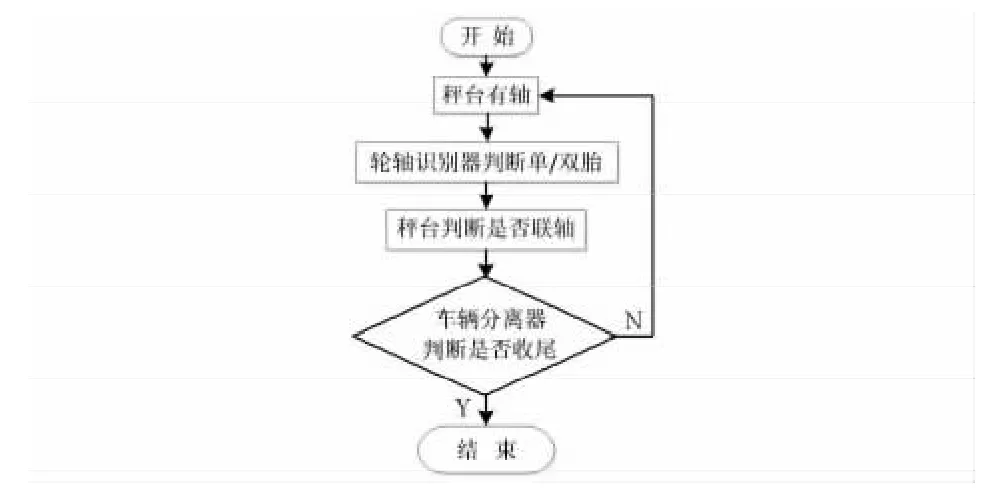
图3 轴型识别程序流程Fig 3 Program flow of axle type identification
经过传感器输入信号和仪表程序分析,可得出车辆的基本轴型,之后经过轴型识别的专家系统的分析,可得出车辆车型轴型编码。
2.2 专家系统
如图4 所示,一般专家系统由知识库、数据库、推理机、解释部分和知识获取5 个部分组成。知识库是专家系统的一个重要组成部分,实际中每种车型具有固定的联轴,而且每种车辆第一轴必定单轮非联轴。根据这些信息和程序分析判断结果可进行知识获取并作为专家知识库,将测得的每个轴组信息作为数据库,利用专家知识库对当前获得的数据进行推理并给出解释和车辆轴型编码。
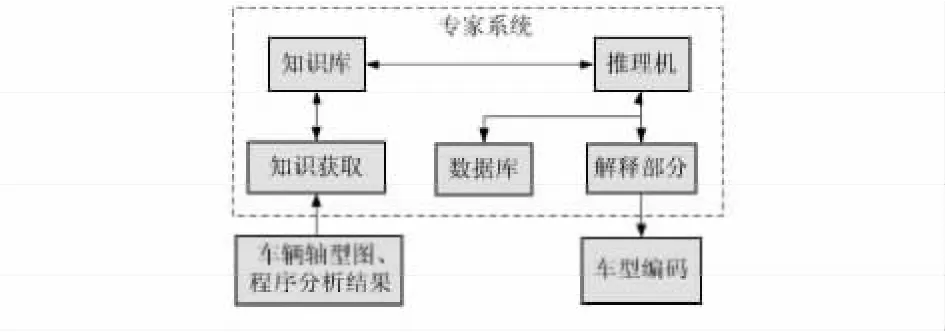
图4 专家系统组成框图Fig 4 Composition block diagram of expert system
3 BP 网络模型
3.1 BP 网络及其学习规则
BP 网络的产生归功于BP 算法的获得。BP 算法属于δ算法,是一种监督式的学习算法。BP 网络工作原理概括来说,就是通过不断调整层与层之间的各个权值,使得误差函数最小。如图5 所示的三层网络为例进行BP 算法推导。
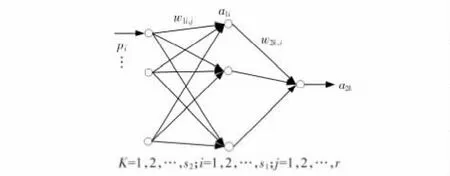
图5 三层网络简图Fig 5 Schematic diagram of three-layer BP network
3.1.1 信息的正向传递
隐含层中第i 个神经元的输出为

输出层第k 个神经元的输出为

3.1.2 利用梯度下降法求权值变化与误差的反向传播
1)输出层的权值变化:对从第i 个输入到第k 个输出的权值,有
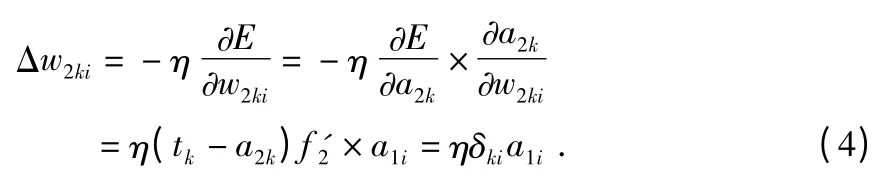
定义误差函数为

其中

同理,可得

2)隐含层权值变化:对从第j 个输入到第i 个输出的权值,有
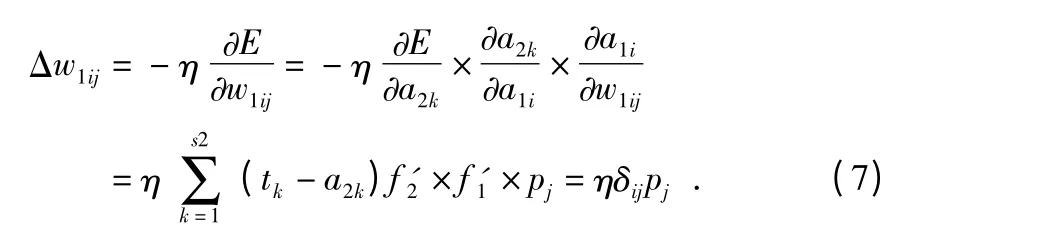
其中

同理,可得

3.2 BP 网络模型
选取由输入层、隐含层、输出层的三层BP 网络。
3.2.1 输入层的选取
对一个BP 网络而言,其输入量的选取将直接决定该网络最终处理数据的能力。在选取BP 网络输入时,总体原则是输入量要尽可能地从不同方面反映所处理数据的特征。
从实验中发现,车辆静态轴重不仅和秤台动态称量值紧密相关,而且跟车轴速度以及加速度有关。现场观察发现,多轴重车司机经常利用速度变化作弊称重,例如:跳磅(前轴急加速)、拖磅(后轴急减速)过秤等。假设车轴匀加速,通过测量车轴在2 个秤台的速度,可以计算车轴的加速度。计算公式如下

其中,a 是车轴加速度;v1是车轴在第1 个秤台的速度;v2是车轴在第2 个秤台的速度;s 是两秤台的中心距离。
此外,轴型不同的车辆在车辆自身谐振也有不同规律,对称重结果的影响也不同。使用专家系统识别车辆轴型后将车型编码输入网络,适用于各种车型,可提高网络的精度。
综上所述,以车轴在秤台一的重量、速度,车轴在秤台二的重量、速度和车轴在秤台的加速度以及车辆轴型作为BP 网络的输入,输入节点个数为6。
3.2.2 网络结构的确定
双秤台汽车衡动态称重的目的就是测量车辆的各个轴重,轴重累加得到车辆静态车重。所以,网络的输出就是车辆的静态轴重。
通过实际仿真计算可得到,隐层的节点数确定为15 个。通过网络层数和输入层、隐层、输出层节点的确定,训练误差为0.001%,最终可确定网络的结构为6×15×1。
4 实 验
4.1 实验样本选择
实验车辆选取一辆115 型四轴车和一辆159 型六轴车。两种车辆分别以5,10,15,20 km/h 左右匀速通过双秤台汽车衡,以5,10 km/h 左右加速通过双秤台汽车衡,以15,20 km/h 左右减速通过双秤台汽车衡。每种车辆共采集样本数据100 组,共采集200 组数据。
其中,每种车辆随机抽取90 组数据作为训练样本,剩余10 组作为测试样本。
4.2 实验结果
将180 组样本数据的秤台一轴重、秤台二轴重、秤台一速度、秤台二速度、加速度、车型作为BP 网络的输入,输出为静态轴重,将训练好的网络检验剩余20 组数据,实验结果见表1。
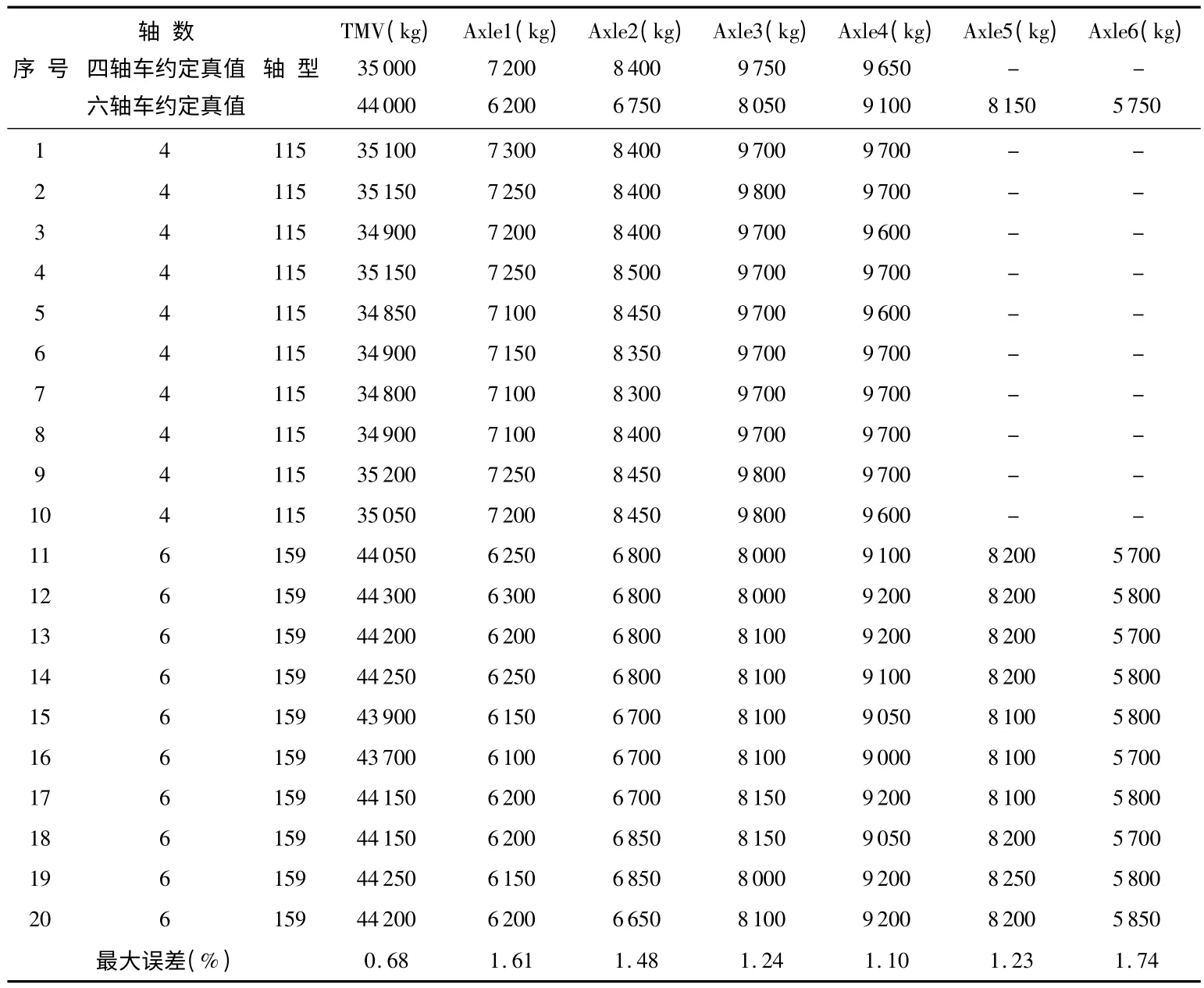
表1 实验数据Tab 1 Experimental datas
从表1 中可以得出:两种车辆的单轴最大误差为1.74%,整车总重最大误差为0.68%,已达到GB/T 21296—2007《动态公路车辆自动衡器》规定的整车总重量的准确度:2 级和单轴载荷的准确度:D 级。显然,基于BP 网络的双秤台动态汽车衡对于两种不同轴型的车辆称重已取得较好的效果。
5 结 论
本文针对双秤台动态汽车衡并根据称重信号分析情况,采用小波变换对信号预处理去除高频噪声。之后将信号输入BP 网络,并在BP 网络模型中加入轴型识别系统和加速度作为输入节点,利用BP 网络良好的自我学习能力,对两种不同车辆过秤数据训练,将训练后的数据检验实验数据。实验证明:该方法能保证处理结果达到动态称重相关国家标准中的较高精度,而且对不同车型车辆具有普遍的适应性。
[1] 李丽宏,石常兴.数据融合技术在车辆轴型识别系统中的应用[J].电子设计工程,2011,19(9):76-78.
[2] 李丽宏,赵 娜.卡尔曼滤波在动态汽车衡称量中的应用[J].软件,2012,33(3):25-28.
[3] 武奇生,王 丹,陈圆媛,等.基于ETC 的车辆动态称重系统轴载数据处理算法研究[J].公路交通科技,2009(10):190-194.
[4] 刘汉平,王健刚,陈冰泉.汽车的运动速度对动态称重结果的影响[J].中外公路,2006,4(26):231-234.
[5] 柒丽娟,那文波,李 宁,等.小波分析在微重量动态称重中的应用研究[J].工业控制计算机,2009,22(10):52-55.
[6] 裴春清.基于深度滤波的动态汽车衡算法[J].科技应用,2008,37(S2):7-9.
[7] 李丽宏,王淑娟.专家系统在车辆轴型识别中的应用[J].软件,2012,33(3):12-14.
[8] 张建新.广义神经网络在联体秤台中的应用[J].计量装置及应用,2013,23(5):48-50.
[9] 曹兴锋.一种BP 神经网络气象预测中的应用研究[J].科技通报,2012,28(8):55-57.
[10]陈 政,钟汇才,李 庆.基于PVDF 压电传感器的车辆动态称重信号的研究[J].传感器与微系统,2012,31(4):36-39.
[11]张德丰.Matlab 神经网络编程[M].北京:化学工业出版社,2011:131-156.
[12]GB/T 21296—2007,动态公路车辆自动衡器[S].
