嫦娥三号软着陆轨道的建模分析
2015-03-25申延成商玉凤庞世春
申延成,商玉凤,庞世春
(空军航空大学 飞行基础训练基地基础部,长春130022)
0 引言
在进行月面勘测时,为了保证仪器设备以及航天员的安全,登陆飞行器都是采用软着陆的方式,所以登陆飞行器的软着陆轨道设计至关重要。嫦娥三号于2013 年12 月2 日1 时30 分成功发射,12 月6 日抵达月球轨道。嫦娥三号的着陆轨道为从近月点至着陆点,其软着陆过程共分为6 个阶段,要求满足每个阶段在关键点所处的状态。
本文首先求出了嫦娥三号在近月点、远月点的速度;其次,采用离散化的思想,对嫦娥三号的软着陆过程进行建模分析,将连续轨道离散化,根据每个阶段两个端点的状态去确定阶段中各个离散点的状态,进而实现对飞行器软着陆轨道的控制。经仿真验证,发现本模型能较准确地模拟出嫦娥三号的软着陆轨道;最后,对模型进行了误差分析。
1 模型的建立与求解
以近月点为坐标原点,近月点指向月心方向为y 轴正方向,垂直于y 轴且与嫦娥三号在近月点速度方向相同的方向为x 轴正方向,建立如图1 所示的直角坐标系。
由万有引力定律可知,嫦娥三号在近月点所受的向心力即为月球对其的引力,即:

其中M 为月球的质量,m 为嫦娥三号的质量,r 为嫦娥三号在近月点与月心的距离,r'为嫦娥三号在近月点对椭圆轨道的曲率半径。易得

联立方程(1)(2),代入相应的数据即可算出近月点的速度va=1692。2m/s,同理得远月点的速度vb=1613.9m/s。
把从15km 到3km 主减速阶段的软着陆轨道用时间间隔进行离散化,整个轨道可分割为N 个小段,每段的节点设一个推力方向,如图2 所示。
在主减速阶段,要使嫦娥三号获得最好的减速效果,减少燃料消耗,应该保持最大推力[1-2],且使每一时刻的推力方向与当时的速度矢量反向。当时间间隔足够小时,可以近似地把嫦娥三号在第i+1 时刻的位置点(xi+1,yi+1)指向第i 时刻的位置点(xi,yi)的方向作为推力的方向,即

图1 直角坐标系示意图

其中θi是第i 时刻嫦娥三号运动方向与x 轴负向的夹角。
在间隔时间很小的情况下可以忽略质量的变化,并且由比冲关系式可知,在一个时间间隔t 内的燃油消耗量为
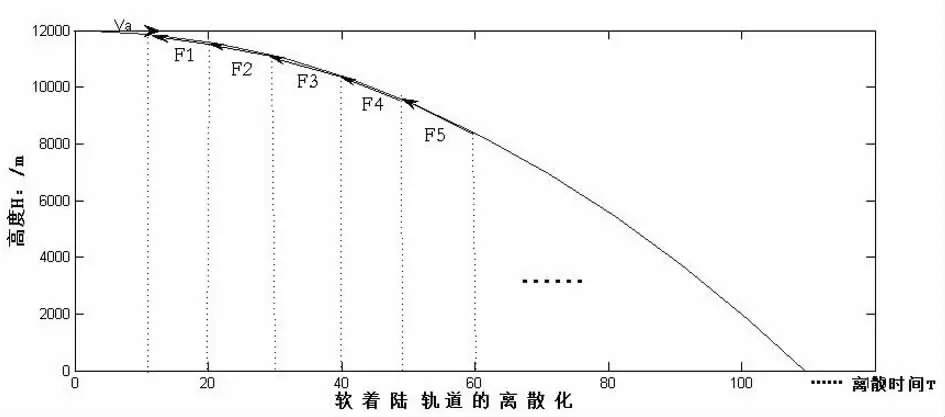
图2 主减速阶段的软着陆轨道离散化
其中,F 是发动机的推力,ve表示以米/秒为单位的比冲表示单位时间燃料消耗的公斤数。所以第i时刻末嫦娥三号质量为

对嫦娥三号在第i 时刻至第i+1 时刻过程进行受力分析,如图3 所示。
由牛顿定律,容易得到

其中,Fx、Fy分别表示合外力在x、y 轴上分量,ax、ay分别表示嫦娥三号在x、y 轴上的加速度。分析式(5)发现:在第i 时刻至第i+1 时刻过程中,嫦娥三号沿x 轴和y 轴分别作匀加速直线运动,于是可得到关于位移和速度的方程:


图3 嫦娥三号的受力分析图
其中,vXi+1、vYi+1分别为嫦娥三号第i+1 时刻速度vi+1在x、y 轴上的分量。这样,由方程(3)(4)(5)(6)(7)(8)(9)(10)(11)便可表示出嫦娥三号在第i(i=0,1,…,N)时刻的质量、速度和位移。
快速调整阶段的分析过程与主减速阶段完全类似,这里不再赘述。
在粗避障阶段,首先对着陆区照片图像进行预处理,然后按下面的方法分步骤找出合适的悬停位置:
Step1:取一个固定点作为参考点,扫描所有的格点,确定每个点的高程值。
Step2:取适当的高度间距值,并从最高的高度向下减一个间距作为起始判断高程。
Step3:找出所有满足该高程的点,判断这些点是否在图中可大致互相连接形成闭合的圈,并且在圈中存在比其高程小的闭合的圈;如果有,排除所有的在该圈内以及所有圈上的点。
Step4:判断高程再减一个间距,如果判断高程未低于最低高程,执行Step3。
Step5:在剩下的格点中选取行列相连足够大且离中心点距离最短的矩形,作为最后的选择点。
找到合适的悬停位置以后,采用与主减速阶段同样的分析方法来模拟这个阶段嫦娥三号的运行轨迹。只是考虑到在本阶段末要求嫦娥三号水平速度为零悬停,我们分两个阶段来完成。第一个阶段是移动到悬停位置正上方,保证速度为零;第二个阶段是竖直向下运动,直至将高度降至100m。
精避障阶段采用与粗避障阶段同样的方法,首先对嫦娥三号高度为100m 时正下方的图像照片进行预处理,选取合适的着陆点。进一步,嫦娥三号在精避障阶段的状态改变量较小,其轨迹可以近似成一条指向月心的轨道。
2 仿真计算
在主减速阶段,已知嫦娥三号初始状态为m=2400kg,θ0=0,x0=0,y0=0,vX0=va,vY0=0。代入初始状态进行递归就可以得到嫦娥三号主减速阶段的运动轨迹。通过MATLAB 编程[3],最终可以得出嫦娥三号在主减速阶段的运动轨道,如图4 所示。
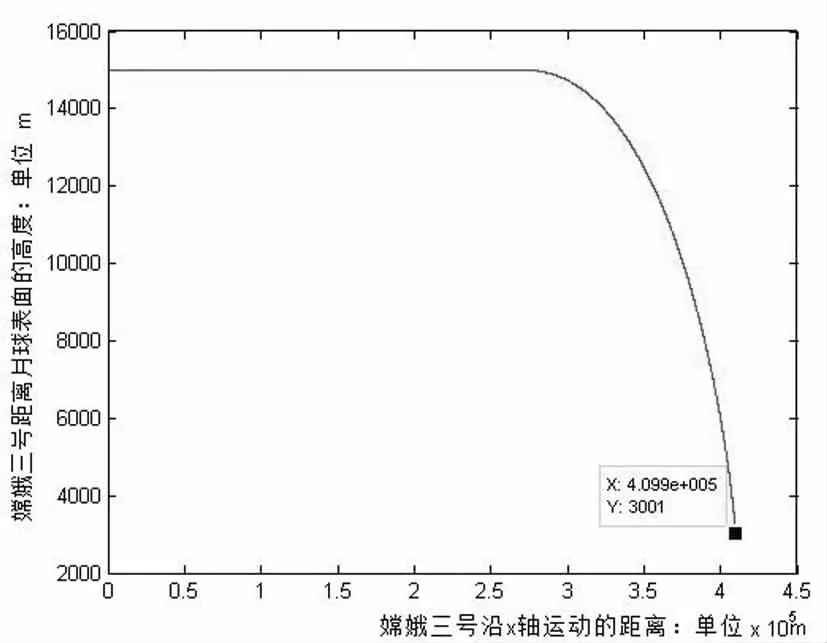
图4 嫦娥三号在主减速阶段的的运动轨道
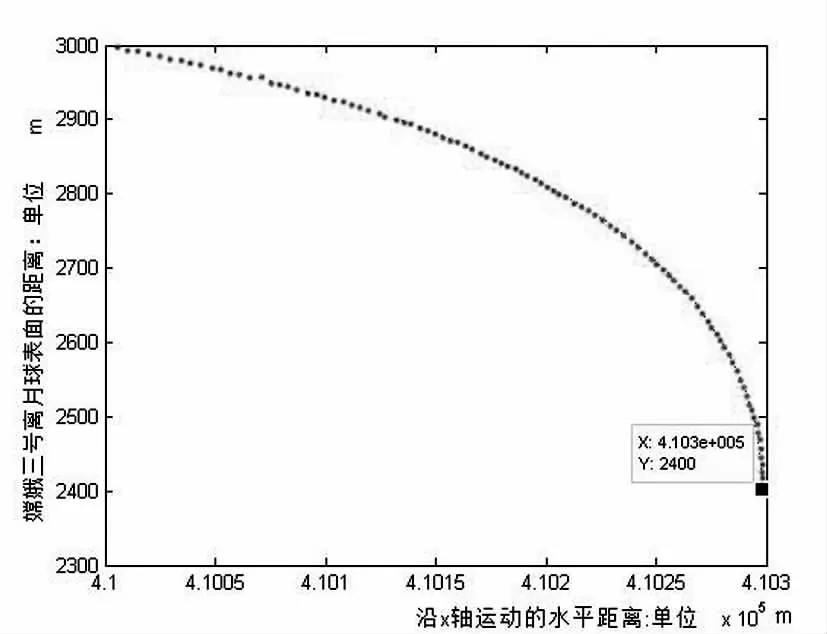
图5 嫦娥三号在快速调整阶段下运动轨迹
主减速阶段共用时425.5 秒,本阶段结束时,嫦娥三号高度为3km,距离近月点的高度差为11996m,水平距离为409.84km,使用燃料1084.9kg,嫦娥三号此时质量为1315.1kg,沿x 轴正方向的速度49.75m/s,轴正方向的速度26.84m/s,合速度大小为56.53m/s,合速度方向跟x 轴正方向的夹角为28.2°.由高度差和合速度可以看出此模型具有较好的合理性。
快速调整阶段的初始状态为m=1315.1kg,θ0=0.49,vX0=49.75m/s,vY0=26.84m/s。代入初始状态值进行递归,使用MATLAB 编程便可得出嫦娥三号在快速调整阶段沿坐标系的运动轨迹,如图5 所示。
由图5 可得,此轨迹与实际要求达到的状态较为符合。在快速调整阶段嫦娥三号高度下降了600m,水平运动了274.97m,使用的时间为10.8s,使用燃料质量为27.8kg,嫦娥三号此时质量为1287.2kg,沿x 轴正方向的速度为0.36m/s,y 轴正方向的速度为83.32m/s。
在粗避障阶段,对照片处理得到图6。然后,根据我们的搜索算法,很快就将像A、D、E 这样的大坑中的点全部排除,最后留下B—C 走廊,其中B 是中心点的位置。显然B 点周围没有较大的矩形以满足于降落,所以沿着B 周围遍历,最后找到C 这个最佳悬停点,其位置坐标为(950,1250)。在该阶段嫦娥三号应移动距离为223.6m。通过MATLAB 仿真,此阶段嫦娥三号的运动轨迹如图7 所示。

图6 距2400m 处的月球表面等高线图
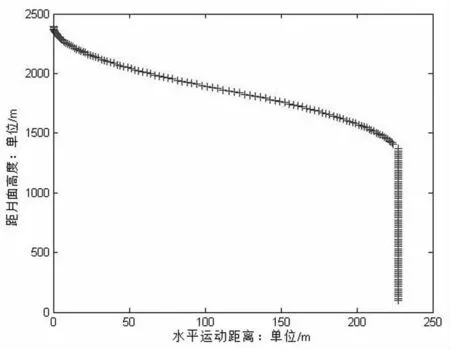
图7 嫦娥三号粗避障阶段的模拟轨迹
在精避障阶段,对100m 处获得的月面着陆区照片进行处理得到图8。然后,根据粗避障阶段的算法,很容易得到A、B、C、D、E、F 处可能存在较大的坑,在选取着陆点时先把这几块矩形所包围的面积剔除。为了节省油料,可选取与中心点距离最短的点为着陆点。用穷举法,发现(54.33,38.64)满足可行域,且离中心较近。
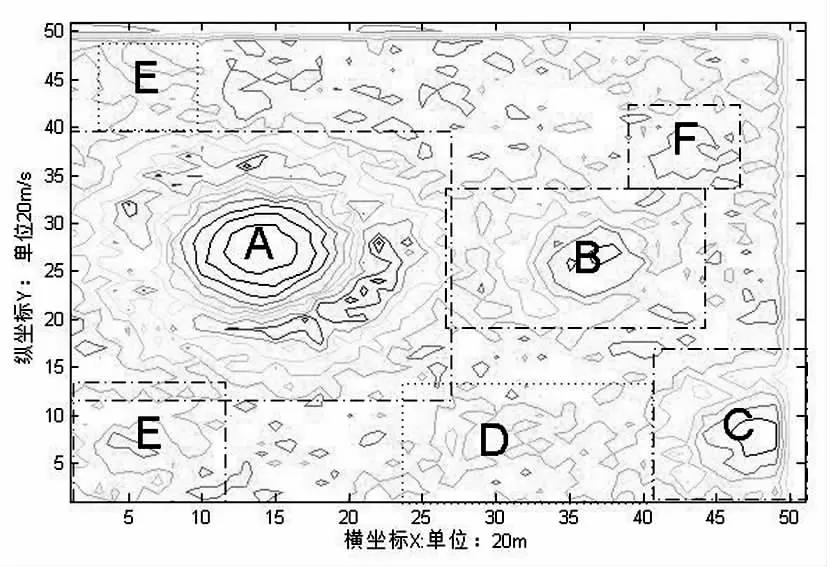
图8 距100m 处的月球表面等高线图
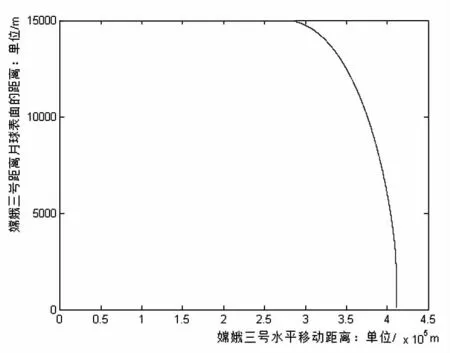
图9 嫦娥三号的整个软着陆轨道模拟图
精避障阶段与粗避障阶段过程相似,并且嫦娥三号的状态改变量较小,其轨迹可以近似成一条指向月心的轨道。在缓速下降阶段和自由落体阶段嫦娥三号只是垂直下落,没有横向的位移。于是,从粗避障过程的第三阶段开始到着陆都是一条指向月心的轨道。结合前面几个阶段的运行轨迹,可以得到整个过程的着陆轨迹,如图9 所示。
3 误差分析
在着陆轨道的确定上,因为解析法难以求解,所以本文采用将轨道离散化分段控制的方法,来计算着陆轨道。通过列出第i 时刻至第i+1 时刻过程中各个量之间的关系,由初始状态去递推出各个时刻的状态。也就是说,在本模型中只能知道每个时间区间两个端点的状态,若想知道区间中某个点的状态,只能用区间端点的状态去替代。进一步,在对着陆轨迹曲线的处理过程中,采用了以直代曲的思想,如图10 所示。
综合以上分析,在本模型中,控制的时间间隔t 越大,误差越大。
4 结语
月球软着陆是月球探测中的一项关键技术,如何实施软着陆以及如何更好地实现对其控制并在过程中尽量减少燃料的消耗,已成为月球探测研究工作中的重中之重。本文建模思想简单,操作性强,对探测器的软着陆轨道设计具有一定的参考意义。
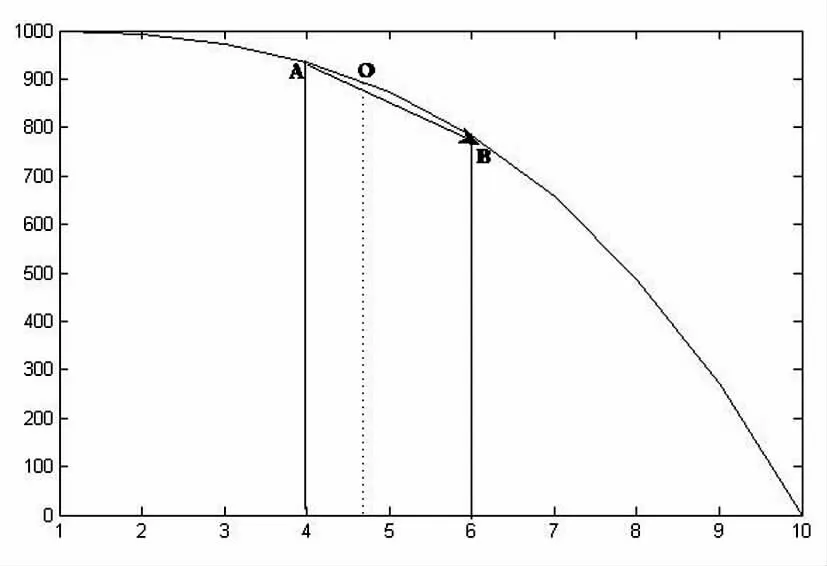
图10 以直线长代替弧线长示意图
[1] 孙军伟,乔栋,崔平远.基于SQP 方法的常推力月球软着陆轨道优化方法[J].宇航学报,2006(1):99-102.
[2] 赵吉松,谷良贤,潘雷.月球最有软着陆两点边值问题的数值解法[J],中国空间科学技术,2009(4):21-27.
[3] 金明,阮沈勇.MATLAB 实用教程[M].2 版.北京:电子工业出版社,2008.
