基于CAN总线的煤矿井下水情监测通信系统
2015-03-19张宏涛
张宏涛
(1.晋城无烟煤矿业集团有限责任公司,山西 晋城 048006;2.太原理工大学,山西 太原 030024)
引言
现在,国内煤矿主要采用RS485信息传输系统作为矿井水情监控系统,该系统的监控底层设备之间无法进行信息沟通,这跟它以主从式体系结构组成、采用时分制通讯为主流技术不无关系。由于传输速度的限制,矿井水情监控系统的实时性一直未能很好的解决。水情监测具有分布分散、情况各异、变化复杂的特点,这个技术难题一直困扰着安全生产。
在水情监测技术发展方面,地面已有的技术对推动煤矿井下水情监测具有重要的指导作用,主要研究包括:文献[1]研究了基于RS485总线的分布式水位监测系统,利用RS485网络构建分布式水位监测系统,并对其软硬件及通信接口设计作了较为详细的介绍,具有建设简单、成本低廉、质量可靠、通信距离远等优点。文献[2]研究了基于GPRS技术的现代化水情监测调度系统,应用GPRS数据终端,综合互联网技术和移动无线传输技术,最终达到水情监测的无线化和自动化。文献[3]研究了嵌入式水情自动监测终端,对水位以CDMA无线通讯方式传送给中心站的系统主机,主机对数据进行处理后发出准确命令,不仅能大大提高效率,也有助于国家水利部门了解水资源情况,为防洪减灾和水资源建设提供很好的依据和支持。文献[4]研究了基于GSM 短消息的水情实时监测系统。该系统由数据采集子系统和监测中心子系统组成,利用水位传感器实时监测水情的变化,由数据采集子系统的GSM MODEM以短消息的方式将当前的实时水情数据发送到水情监测中心和相关管理人员手机,以便及时处理。
因此设计能有效应用于煤矿井下的所有工作环境,随时采集能最直接反应水文信息的变化的信息,最终达到水情实时监控的目的,对超前预测水文灾害具有重要的意义。
1 CAN总线通信介绍
随着计算机硬件、软件技术及集成电路技术的迅速发展,作为计算机控制领域的一个分支,工业控制系统的发展一日千里,为了适应技术需求,分布式工业控制系统逐步发展起来。这类技术将微处理器作为控制核心,属于将5C技术紧密结合的产物,融合了计算机、自动控制、通信、显示技术和转换技术。它具有广泛的适用范围和良好的可扩展性,方便维护,可靠性和抗故障能力也表现突出。因此,相对于单一仪表控制系统和集中型计算机控制系统其具有不可忽视的优越性。
现场总线技术已逐渐成为自动化通信领域研究的热点之一。它的出现为提高分布式控制系统的通信实时性和可靠性提供了技术支撑。CAN(Controller Area Network)属于控制局域网,与RS485类似,也是一种分布式控制或实时控制系统中常用的串行通信网络。控制器局部网是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其性能优越,已逐步在汽车业、医疗领域、建筑行业、机电一体化等控制领域得到了推广和应用。1991年9月,PHILIPS半导体公司制订并且发布了有关CAN总线的技术规范(CAN VERSION2.0)。该规范分为 A、B两部分。2.0A主要叙述了1.2版本规范中具体定义的CAN报文格式,而2.0B重点定义了适用于CAN总线的标准和扩展两种数据帧格式。之后,1993年11月国际标准化组织正式颁布了ISOll898标准,该标准进一步促进了高速通信控制器局部网(CAN)的推广与应用。CAN协议涵盖的开放式系统互联基本上按照模型中的传输层、数据链路层及物理层设计。其中关于ISO/OSI基本上按照模型中的传输层、数据链路层及物理层。
CAN总线在信息发送控制、系统兼容性、通信速度及错误控制等方面都有不同于传统总线的特点。在信息发送机制方面,CAN总线采用多主控制模式,当总线没有执行收发动作时,所有的网络内节点都可开始发送消息,当然,发送权由谁获得取决于发送的先后顺序。系统中多个网络节点同时发送数据时,信息中包含较高优先级ID的发送节点可获得发送权。根据CAN标准定义,所有网络内的消息都以约定不变的帧格式传输。当总线空闲时,所有节点都可以发送新报文。多个节点遭遇发送冲突时,根据标识符决定报文的优先级。ID并非代表发送的目的地址,而是象征着正在所发消息的优先等级。当同时有两个以上的数据节点开始发送报文时,将由控制器对各消息ID的进行逐位仲裁。优先级最高的节点可继续发送报文,优先级较低的则立刻停止发送,转为接收状态。这样的逐位仲裁机制能够保证最大程序的信息完整性和传输的快速性,可有效提高总线数据的传输速率。
2 煤矿井下水情监测通信系统架构设计
分站的通信部分主要由CAN通信网络组成,CAN通信采用C8051F040自带CAN控制器,CAN控制器包含一个控制局域网核、消息存储器、一个消息处理状态机以及控制寄存器。CAN控制器可以工作在高达1M位/s的位速率。Silicon Labs的CAN有32个消息对象,每个消息对象有其自己的标识掩码,通过标识掩码筛选接收到的信息。数据、消息对象和标识掩码都存在控制器局域网的消息ROM中。CAN控制器功能强大,可以单独处理与数据发送和接收过滤有关的所有协议,完全用不到C8051微处理器。这就使得用于CAN通信的处理器带宽最小。C8051的读写数据功能都通过特殊功能控制器配置CAN控制器来完成。CAN网络典型双波特率拓扑结构如图1所示。

图1 CAN网络典型多波特率拓扑结构图
监控系统采用了分站与主站搭配的主从式系统架构,分站与主站均配置CAN总线接口,通过CAN总线进行信息交换,实现数据共享,主站除了CAN总线接口后还配置了以太网通讯接口,可以兼容100/1 000BASE-T网络,实现与工业环网对接。每一个分站都可以查询到其他另外分站的水位、压力、水泵状态,这都依赖于CAN总线数据传输的快速性和可靠性。
根据实地调研与煤矿井下实际工况需要,系统准备安装10个监控分站和一个主站。分站分别在3条巷道的10个水仓位置安装,以实现对水仓水位信息、水泵状态、报警状态信息的采集。对于水量不是特别大、水位变化不是很频繁的地方并未安装水泵,故仅对水位信息进行监测。主站通过CAN总线接口接收来自各个分站的反馈信息,然后通过以太网接口将所有信息传送至地面调度中心的上位机,来实现信息总览和实时监控。系统总体通讯架构设计图如下页图2所示。

图2 通信系统架构图
通过实际测量,本监控系统中最远的两个分站节点的距离大约4km,对照表1可以看出,本通讯协议的波特率设置不宜超过20kbps;因此在适用工业设备的应用层协议只能选用CANopen协议;但是本系统中总线只用于简单收发数据,而CANopen协议中涉及到通讯模型和对象词典等复杂定义,实现起来较为复杂,从实用性和简易性角度来分析,选择自己构建适合自身系统的通讯协议。结合监控系统功能,本系统采用主从轮询的方式搭建通信协议,帧格式采用标准帧格式,即ID位数为11,系统站点一共有9个,故设置ID时,前7位全设置为1,后4位分别设置为0x01~0x09,即分站编号为1—8,主站编号为9。通过分析系统功能,可知主站需要向分站发送21字节数据(请求报文),而分站需向主站返回17字节数据(响应报文)。但是CAN总线每一帧只能携带8字节的数据,故主站向分站发送数据时分3帧进行,分站向主站返回数据也分3帧进行。因此,将CAN协议每帧中数据段的第一个字节作为“帧编号字段”,之后的7个字节的数据才是有效载荷。
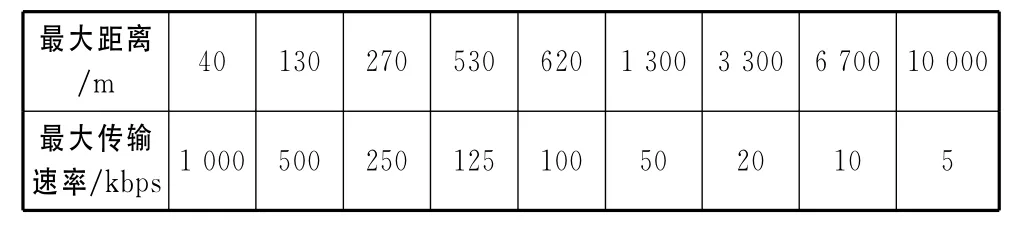
表1 CAN总线系统在任意两节点之间的最大距离与最大传输速率对应表
3 结语
完成了CAN总线搭建,进行了通信调试,验证了数据传输以及通信的稳定性,在调试过程中不断改进电路结构和软件结构,使整个系统更加符合现场使用需求。
[1] 唐振,宋天武,金明.基于RS-485总线的分布式水位监测系统设计[J].湖北科技学院学报,2013(8):211-212.
[2] 曹卫,董航飞,李宗宝.GPRS技术在水利监测系统中的应用[J].排灌机械,2007(5):39-42.
[3] 马洪连,李龙,芦良鑫.水情自动监测终端的设计与实现[J].仪器仪表学报,2007(1):274-276.
[4] 沈旭.基于GSM短消息的水情实时监测系统设计[J].微计算机信息,2008(18):141-142.
