飞机泊位系统中的激光扫描数据的处理
2015-03-18王春彦邸金红
王春彦,邸金红
(郑州航空工业管理学院电子通信工程系,郑州450000)
引 言
飞机泊位引导[1]是指将到港飞机从滑行道末端导引至机坪的停机位置并准确停泊的过程。目前,飞机泊位引导主要分为两种工作方式:(1)人工引导;(2)自动引导。人工引导是通过专业引导员站在入坞飞机的前方用专用标牌向飞行员展示各种行为语言来指示飞机的入坞信息。自动引导是通过各种类型传感器采集入坞飞机的姿态和速度信息,利用计算机对这些入坞信息进行有效处理和分析进而产生入坞飞机的引导信息,并通过停泊前方的显示设备向飞机驾驶员、副驾驶员或其他人员显示泊位引导信息。近年来,随着机场管理控制系统的自动化、网络化、一体化和智能化水平的提高,传统的人工引导方式已不能满足需求。自动飞机泊位引导系统则能有效提高机场的装备水平、运营效率、管理水平和服务质量。
自动飞机泊位引导系统按使用传感器的类型不同主要分为:(1)地埋线圈类;(2)激光扫描测距类;(3)视觉感知类。地埋感应线圈类误差较大、易损坏、可靠性不高;视觉感知类对天气和照度有要求、适应性较差;而激光扫描测距类不受环境照度的影响、且受天气影响较小、精度较高,因而得到广泛应用。飞机泊位系统国外早有所发展,1992年瑞典的FMT公司研制了基于激光技术的飞机位置及咨询显示系统(aiccraft positioning and infomation system,APIS);1995年瑞典的Safegate公司推出了以激光为基础的新一代Safedock引导系统。目前,Safegate公司市场占有率达到80%。美国Honeywell公司的可视化飞机泊位引导系统(visual docking guidance system,VDGS)和德国西门子公司的视频泊位引导系统(video docking system,VDOCKS)也得到应用。而国内还没有生产销售具有自主知识产权的泊位引导系统。
1 基于激光扫描的飞机泊位的原理与激光扫描系统的构成
基于激光扫描[2]的飞机泊位引导系统采用水平扫描步进电机和垂直扫描步进电机驱动水平振镜和垂直振镜,对激光测距仪的发射光束和回波光束实现偏移,水平振镜和垂直振镜的偏转角及激光测距数据组合后得到3维测量数据。3维数据以离散点的形式描绘出飞机机头的轮廓,提取出飞机鼻尖和引擎的参量,并将引导信息显示在正对引导线安装的LED上,从而实现入坞飞机的捕获、跟踪、引导、识别、精确定位,并要求在停止线上,飞机偏离引导线的距离小于100mm。
跟踪引导飞机泊位的过程中,双镜系统中的垂直镜跟踪飞机的鼻尖,水平镜水平扫描1行,根据落在飞机上的扫描点,通过二次拟合,拟合出的曲线上的顶点,即距离最小值点,就是飞机的鼻尖。通过对鼻尖所在位置的坐标解算,得出鼻尖相对于引导线的偏差,判断当前飞机是否偏离引导线,并将飞机的偏离情况通过LED屏显示,飞机员通过查看LED,调整飞机至引导线重合。在引导飞机泊位的过程中,根据飞机固有的特性,不同的型号飞机的鼻尖高度和引擎距离鼻尖的距离不同,对泊位飞机的机型进行识别。
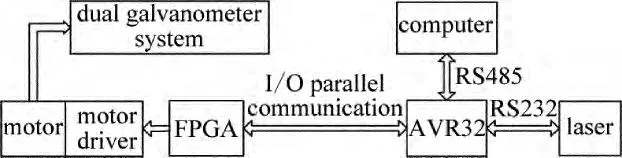
Fig.1 Laser scanning system of aircraft docking system
本文中研究的飞机泊位系统基于振镜的激光扫描[3-5],如图1所示。激光扫描系统设计为外置于工控机的独立子系统,便于其维护与调试,提高系统的可靠性。控制器采用AVR32,通过输入/输出(input/output,I/O)并行通信与现场可编程门阵列(field programmable gate array,FPGA)协同工作,完成水平和垂直扫描控制、激光扫描数据的采集、与工控机的数据通信等,而激光扫描点云数据的处理由工控机完成,并由当前数据处理结果得到下一步需采取的扫描策略。激光扫描系统通过独立的RS485接口与工控机连接,形成一对一的通信方式。
2 激光扫描数据处理算法流程图
对激光扫描数据进行处理,主要是为了消除激光扫描数据点中的噪声点,并对该噪声点进行补偿;精简数据传输字节,以提高数据在上位机和控制板卡之间的通信速率;对扫描点数据进行曲线拟合以获得飞机的扫描轮廓,判断飞机相对停止线的左右偏离情况,处理流程如图2所示。
在激光扫描数据的处理过程中,主要采用了对激光扫描数据的精简和错误点标识,对应图2a;对激光数据进行中值滤波以消除噪声点,对应图2b;对机头扫描数据进行曲线拟合,以满足数据结算的需求,对应图2c。
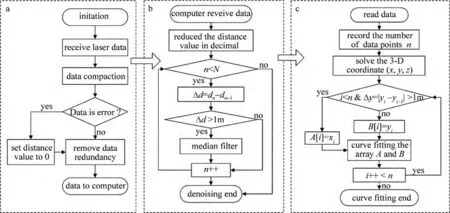
Fig.2 Processing of laser scanning data
3 数据精简与错误点标识
激光扫描系统选用班纳公司的LT300远距离激光测距仪[6]。班纳LT300型激光测距仪采用激光脉冲飞行时间测量法,对于自然物体表面测量范围可达300m,满足飞机泊位的距离要求,测量精度到60mm,满足系统的100mm泊位误差要求。
激光测距仪以二进制输出距离值,单位为mm。输出距离值为3byte,其中byte 2最高位始终为1;byte 1和byte 0的最高位始终为0。剩余的21bit表示距离值。为了数据的快速传输,需要在AVR32 MCU中对数据精简处理。先将byte 2,byte 1和byte 0的最高位去掉。在机场的实际环境中,由于飞机泊位的最大距离不大于200m,因此表示距离值的21bit中,使用低18bit就可以表示200m内的任意距离,单位为1mm,而高3bit不使用。如图3所示。
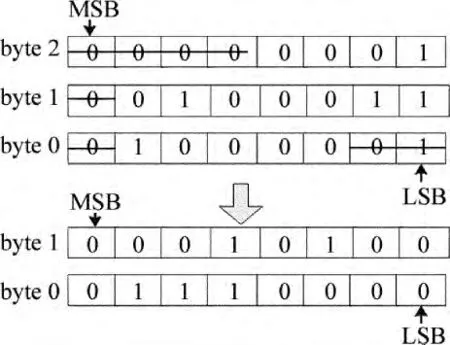
Fig.3 Data compaction of laser scanning data
激光测距仪的单次测量误差最大为60mm,小于100mm的系统误差要求,因此在毫米量级的误差可以忽略不计。将上述18bit量程的最低2bit舍去,如图3所示,不影响精度,此时距离值的最小单位为4mm。从而实现将3byte的距离值缩减为2byte。此时可使数据传输速率增加1/3。以距离值29121mm为例,原存储格式为:0x814341。经过数据精简后,传输格式为:0x1470。数据精简算法示意如图3所示,图中,MSB表示字节的最高位(the most significant bit),LSB表示字节的最低位(the least significant bit)。
激光测距数据精简后,进行错误点的标识。在实际飞机泊位的过程中,由于飞机泊位系统安装位置距离飞机停止线的距离在12m以上,整个飞机入坞区域中和飞机泊位系统的安装位置的最大距离不超过150m。因此,将精简后的激光数据值中的小于12m和大于150m的距离值标为0,并在上传数据给工控机之前,去除这些距离值为0的数值。
4 消除噪声
通过对机场的现场测试数据分析可知,在连续扫描的数据中总存在一些杂散点和错误点,需要对其进行滤除。为保证数据处理的实时性,此处引入图像处理中的中值滤波算法并加以简化,使之应用于激光扫描数据的噪声去除[7-8]。消除噪声的流程如图2b所示。
将激光扫描的每行/列数据看成点集P(d1,d2,d3,…,dN)。定义前向数据差Δdb=di-di-1。对于在一个平面上的点,di≈di-1,Δd≈0。由于存在噪声点,且假设该噪声点的值为di,通常该噪声点值与其相邻点di-1,di+1的差值 Δdf和 Δdb会较大,其中 Δdf=didi-1,Δdb=di-di+1。根据机场实验得到的数据分析,设定阈值Δd=1m,即相邻两点的距离差值阈值大于1m时,可认为距离值发生突变,对应的激光点不在同一个平面上[9-11]。如图4所示。
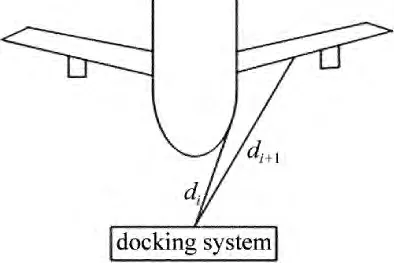
Fig.4 Distance mutation
中值滤波的流程如图2b所示,中值滤波的效果如图5所示。
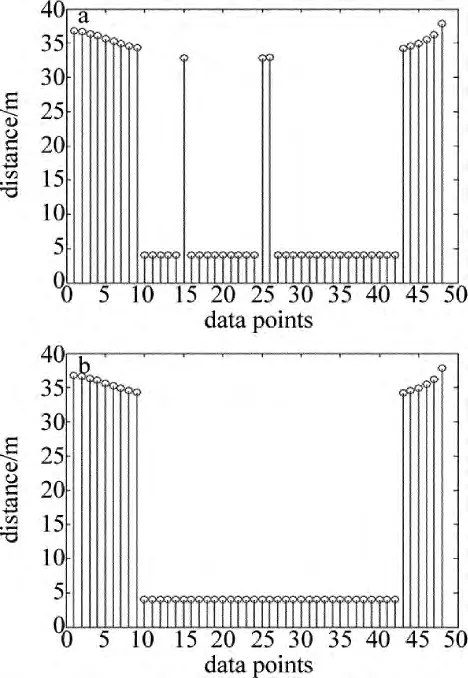
Fig.5 Effect of the median filtering a—before median filtering b—after median filtering
5 数据拟合
在对扫描点进行重排后,需要对扫描数据点进行曲线拟合。在实际应用中,重点关注机头位置的扫描点的曲线,根据机头外形,选择最小二乘的二次曲线进行拟合[12-14]。
对落在机头上的3维点 pi(xi,yi,zi)与另一点pj(xj,yj,zj),由于 pi和 pj同属于同一行激光点,因此zi=zj。即进行曲线拟合时仅需要对(xi,yi)进行曲线拟合。
根据飞机外形轮廓和角度值α确定,假设落在机头上的点集为 S(p1,p2,p3,…,pN)。其中 pi的值为点集合(xi,yi)。可将飞机机头部分进行的扫描点用二次多项式拟合,即:

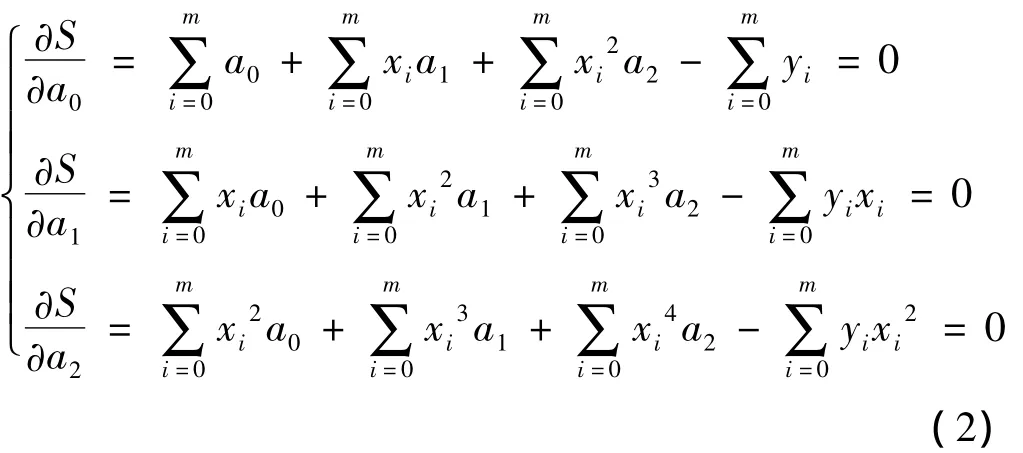
引入记号s次曲线拟合过程中xi的幂次数。则(2)式可以表述为:,其中,k 是二
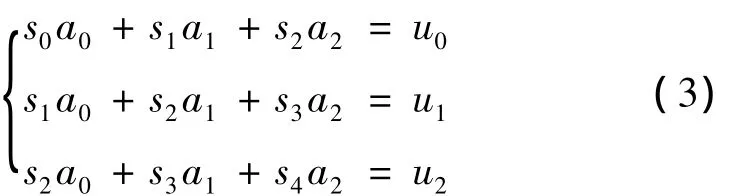
将(3)式用矩阵形式表示为:
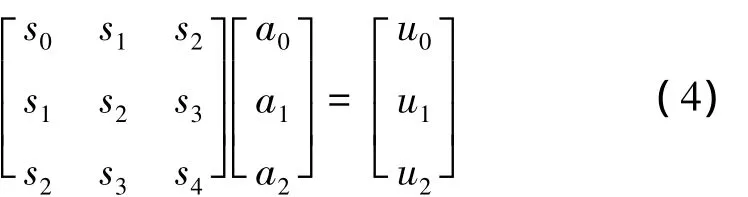
通过对此方程进行求解,可以得到(a0,a1,a2)的值。数据拟合过程如图2c所示。图6为一次扫描数据的二次拟合曲线图。

Fig.6 Effect of conics fitting
图6 中虚线为激光扫描原始数据的轮廓线,实线为经过最小二乘的二次多项式拟合后的曲线。
6 结论
针对飞机泊位对时间和精度的严格要求,本文中研究了对激光数据的处理。通对激光数据精简,解决数据传输速率过慢的问题。通过中值滤波,能较好地消除扫描点中杂散的噪声点,且通过控制中值滤波的模长可以滤除连续的噪声。通过最小二次曲线拟合,可以描绘出飞机的外形轮廓,用来判断飞机相对引导线的偏离程度。通过机场实际测试,对激光数据的处理,可以很好地保证实现飞机泊位过程的精确性。
[1] HAN W P,MENG W.Error analysis and correction methods of dual galvanometer scanning[J].Elector-Optic Technology Application,2011,26(4):14-18(in Chinese).
[2] ZHANG H X.Study on building modeling based on 3-D laser scanning technology[J].Laser Technology,2014,38(5):431-434(in Chinese).
[3] PENG L Y,WANG X Y,ZHOU J T,et al.Polynomial fitting correction of galvanometer geometric distortion error in laser marking[J].Laser Technology,2013,37(5):601-604(in Chinese).
[4] QIN G,XU D Sh.Design and realization of multi target pulsed laser range finder on CPLD[J].Laser& Infrared,2010,40(2):152-154(in Chinese).
[5] LIU W.The laser ranging system based on FPGA technology[D].Nanjing:Nanjing University of Science and Technology,2007:30-57(in Chinese).
[6] ZHOU Sh Y.Design and research on laser range finder system[D].Harbin:Harbin Institute of Technology,2009:40-52(in Chinese).
[7] WANG X X,JIANG D F,LIN Zh W.High efficiency implementation of real time median filtering in embedded system[J].Microelectronics,2010,40(6):852-856(in Chinese).
[8] WEI Y F,DU Zh Ch,YAO Zh Q.Application of median filter in point cloud data pre-processing lidar[J].Laser Technology,2009,33(2):213-216(in Chinese).
[9] ZHANG M Y,WANG H L.Application of image noise removing based on improved median filtering[J].Ordnance Industry Automation,2006,26(8):45-47(in Chinese).
[10] KOLTEP P,SMITH R,SU W.A fast median filter using AltiVec[C]//IEEE International Conference on Computer Design(ICCD).New York,USA:IEEE,1999:384-391.
[11] JIANG B,HUANG W.Adaptive threshold median filter for multiple-impulse noise[J].Journal of Electronic Science Technology of China,2007,5(1):70-74.
[12] REN Sh Zh,WANG G J.Optimizing the parameters of data points in curve and surface fitting[J].Journal of Image and Graphics,2006,11(1):96-102(in Chinese).
[13] LIU J.Fitting and interpolation for curve and surface from scattered data using moving least squares method[D].Hangzhou:Zhejiang University,2011:18-38(in Chinese).
[14] WANG L P.Research on curve and surface fitting from cloud data[D].Ji’nan:Shandong University,2008:18-44(in Chinese).
