航空摄影测量在矿区1:2 000地形图测绘中的应用研究
2015-03-18王贺封张安兵张兆江
焦 旭,王贺封,张安兵,张兆江
(1.河北工程大学资源学院,河北邯郸056000;2.河北省煤炭资源综合开发与利用协同创新中心,河北邯郸056000)
随着测绘技术与计算机技术的快速发展,摄影测量经历了模拟摄影测量、解析摄影测量、和如今的数字摄影测量阶段。无人机航空摄影以其灵活机动、高效便捷、成本低等特点为快速获取影像提供了保障,目前已在各类工程领域广泛应用。如王俊等使用Leica ADS80航空摄影测量系统在甘肃省基础测绘任务中得到了很好的应用[1];洪运富等利用无人机遥感影像对张家口市重点尾矿库进行了环境监控[2];吕立蕾等研究证明了无人机航摄技术可以高效、快速地完成线路带状地形图测绘任务[3];赵星涛等利用无人机低空航摄获取了矿区0.20 m分辨率的正射影像及立体正摄影像对,并结合开采沉陷预计下沉等值线为矿山地质环境的精细探测提供了一种可行的途径[4];李雷等为利用无人机影像进行大面积城市基本比例尺地形图进行了尝试[5]。无人机影像在城镇、乡村地形图测绘,正射影像的生产及矿区环境监测、数字矿山建设等应用中发挥了重要的作用。但由于无人机搭载非量测相机,存在飞行姿态不稳定、旋偏角较大、影像畸变较大、比例尺不一等问题,要使其精度满足于大比例尺地形图测绘,需要深入研究的东西还很多,特别是在矿区大比例尺地形图测绘中的应用研究相对较少。本文以“冀中能源邯郸矿业集团太行矿业有限公司矿区基础地形图更新”为例,采用DAT-Matrix2.0结合PAT-B平差软件进行空三加密,导入Map-Matrix4.1进行立体采集,提出了一套矿区大面积、大比例尺地形图的成图方法,并对空三加密关键技术和成图精度进行了研究和分析。
1 影像获取与控制点布设方案
矿区位于武安市东南方向,距武安市约5 km,属丘陵地类型。影像获取采用华测P700无人机搭载索尼 A7单反数码相机,镜头焦距为32.887 mm,设计航高约800 m。考虑到无人机质量轻,低空作业时气流对其旋偏角影响较大,重叠度设计较小容易造成航摄漏洞。而重叠度设计较大,航飞重叠度又会导致基高比小,影响高程精度,同时也会带来内业测图时像对数量过多,增加处理难度。为此,经过综合考虑,航飞设计航向重叠度70%,旁向重叠度40%,航摄共飞行8个架次,获取影像3 011张。
控制点布设方面,由于测区地形环境复杂,在每个预布设控制点的点位范围内要选取多个特征地物作为控制点,预留多个点位,以避免外业人员无法到达及无法判断具体位置的情况发生。本文控制点布设采用航线方向每隔6条基线布设一个平高控制点,旁向每隔一条航线布设一排平高控制点的方式。
2 空三加密
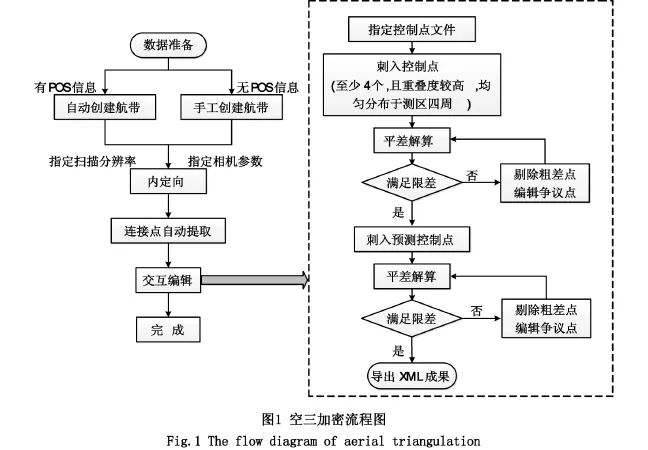
空三加密是用摄影测量解析法确定区域内所有影像的外方位元素,影响最终成图精度的最为关键的技术。本文主要利用DAT-Matrix2.0结合PATB光束法平差软件对测区获取影像数据进行空三加密处理,通过影像内定向,自动转点,交互编辑,粗差检测及精度检查等处理过程,有效地保证了测图精度。空三加密流程如图1所示。
2.1 无人机影像畸变差改正与内定向
由于无人机搭载非量测相机,其物镜畸变差较大,如不对畸变差进行校正,将会对空三加密精度造成很大影响。相机的误差主要来源是光学镜头的畸变差和机械误差。畸变差包含径向畸变差和切向畸变差,是由于相机镜头在制作和使用过程中引起的像点偏移其正确成像位置的点位误差;机械误差是在镜头摄取的影像转化到数字化阵列影像过程中产生的误差。
为了减小影像畸变差对空三加密精度的影响,影像畸变差改正是空三加密重要内容。本文首先对影像畸变差进行改正,利用的相机畸变改正模型如(1):

2.2 相对定向与影像匹配
相对定向的目的是恢复摄影时相邻两影像摄影光束的相互关系,从而使同名光束对对相交[6]。目前,数字影像的全自动相对定向已不再仅仅利用传统的6点,而是利用相当多的点来完成,这样就可以有大量的多余观测,以提高定向参数解算的可靠性,并可自动剔除粗差[7]。因此,需要对影像匹配提出更高的要求,影像匹配精度的好坏、速度的快慢直接决定着空三加密的精度、效率及自动化程度。
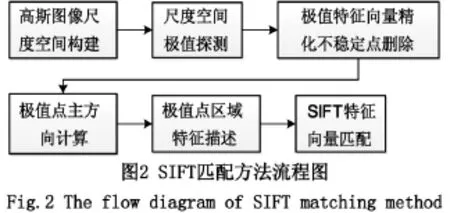
常用的影像匹配方式有灰度相关匹配、最小二乘匹配和基于尺度不变特征匹配(Scale Invariant Feature Transform,SIFT)三种。无人机受风力影响,飞行姿态不稳定,影像旋偏角较大,传统的二维相关、一维相关的灰度匹配已经不能匹配到点,而最小二乘匹配虽然匹配精度很高,但计算时间长,效率低,因此采用以上两种方法要使匹配达到高精度、高效率均存在一定局限性。然而Lowe 1999年提出并在2004年进一步完善的SIFT匹配算法[8-9]能较好的解决这一问题,SIFT算子能够提供最为稳定的尺度、旋转以及平移不变特征,对于光照及噪声影响也具有较强的抵抗性,从而达到抗几何变换的目的。SIFT特征匹配算法流程如图2所示。
SIFT匹配保证了尺度不变性,对于较大旋偏角,较难匹配的像对也能匹配到同名像点;但同时也存在匹配精度不高,匹配点位分布不均匀,错误匹配等现象。因此需要采用附加约束条件的方法来剔除错误匹配。论文对数据处理时,使用DAT-Matrix2.0结合PATB光束法平差软件很好地解决了这一问题。对于旋偏角较大的像对,传统灰度匹配方法匹配不到点时,可结合SIFT匹配算法进行匹配,通过这种传统的灰度匹配与SIFT匹配算法相结合的方式,匹配的同名像点密度较好。为保证匹配精度,再调用PATB平差软件进行解算,对错误匹配像点进行剔除,以提高匹配的精度。另外,对于某些基于上述匹配方法仍没有匹配到精度较高的点时,可在影像缺点的地区手工添加少量连接点,所选取的点应是特征位置点,具有特征纹理的位置,例如房角、道路交叉口、方形水井拐角等,而且要添加准确并保证添加的点连接度在4度连接以上,在航带内与航带间都有重叠,以加强整个架次的模型连接性,提高像点精度。
2.3 绝对定向
通常,当加密一个测区时,首先做粗差检测。影像匹配完成后,首先在测区四周均匀刺入至少4个控制点,调用PATB平差解算。首次解算一般假设像点观测精度为1/2像元大小,控制点限差为所要达到精度的3倍,进行解算。解算完成后将平差报告中sigma naught值赋予此测区的像点观测限差,再进行挑粗差解算,并将超限的粗差点剔除改正。如此反复平差解算直至报告中像点精度满足要求,根据预测控制点点位由外至内依次刺入其他预测控制点,并调整其点位于正确位置,然后更改控制点限差为所要达到精度的一半,再次平差解算,剔除粗差点,再次反复解算剔除粗差点直至控制点残差满足要求。
2.4 空三加密精度分析
空三加密完成后,主要从以下几点判定成果的可靠性:
(1)像点最大残差值(Max Change值)在规范误差范围内。
(2)像点观测中误差sigma值在规范范围内,一般控制在1/2像元以内。
(3)控制点精度在误差范围内。
控制点平面中误差、高程中误差按下式计算。

式中:m-控制点中误差,单位为m;Δi-控制点实测值与解算值之差;n-参与评定控制点个数。
经过计算,研究区域控制点定向精度见表1。

表1 控制点定向精度检查表单位:mTab.1 Table of control points accuracy checking Unit:m
依据规范[10]要求,对于1:2 000丘陵地区基本定向点中误差限差平面为 0.3 m,高程为0.26 m。表1中,定向精度平面最大中误差为0.275 m,高程最大中误差为 0.173 m,平面、高程最大中误差均小于规范要求中误差限差,空三加密精度达到规范要求。
3 立体测图与成图精度分析
基于空三加密成果,利用Map-Matrix4.1摄影测量工作站对研究区进行立体测图,完成11.43 km2的矿区地形图测绘工作。考虑到获取数据航摄架次较多,可能存在模型接边差,为此采用先对不同架次模型边界进行立体测图,同时结合外业调绘检查点对其进行检核,模型间若存在差异,必要时确定超限架次,返回空三加密对其重新处理。
本文选取151个平面点、146个高程点分别对成图精度进行分析,结果如表2所示。
依据国家标准要求[11],平面中误差不得大于1.2 m,高程中误差不得大于0.5 m,平面高程最大限差不得大于2倍的中误差。对误差频率进行统计,结果如图3所示。
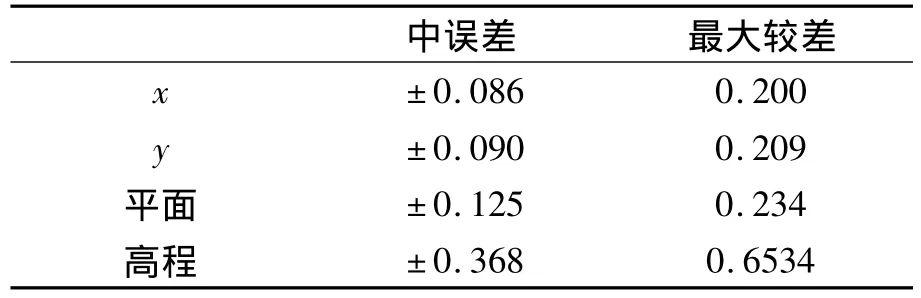
表2 成图精度检查表单位:mTab.2 Table of mapping accuracy checking Unit:m
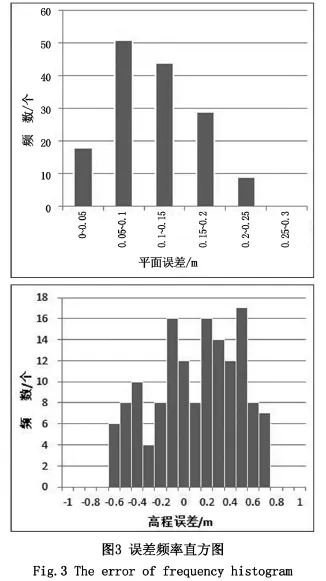
平面误差频数呈下降趋势,且误差均小于0.25 m,精度优于规范要求;高程误差频数基本符合正态分布规律,小于1倍规范中误差点数为80.1%,1倍与 2倍规范中误差之间点数为19.9%,大于2倍规范中误差点数为0,误差主要集中在-0.5~0.5 m之间。根据统计,各项指标满足国家标准规范要求,实现了高精度数字化成图。
但由统计数据知,平面精度在各指标均优于高程精度,引起高程误差较大的主要原因是无人机采用非量测相机,相机虽经过检校得到了畸变参数,但是在现场飞行和搬运过程中不可避免的对相机有碰撞,引起相机畸变参数不准,产生了误差。而且无人机影像像幅小、基线较短,又加之风力影响,在顶风飞行时基线长度更小,使的基高比小,对高程精度造成了影响。若想提高精度,就需要使用专业航摄相机及提高无人机的飞行稳定性,但这就对无人机的质量及荷载提出了更高要求,仍需进一步研究。
4 结论
经过精度分析,各项精度达到了国家的规范要求,实践证明可以将摄影测量应用于矿区地形图的测绘工作中,并且能够快速、高效地完成测图任务。文中对关键技术方法的研究与分析为摄影测量影像处理提供了一种有益的思路。下一步要针对如何利用少量控制点或者无需地面控制点即可进行高精度的空三加密及利用无人机完成1:500地形图的测绘工作进行深入研究。
[1]王俊.ADS80航空摄影测量系统在甘肃省基础测绘中的应用[J].测绘通报,2012(Z1):433-435.
[2]洪运富,杨一鹏,杨海军.DPGrid_LAT在尾矿库无人机遥感影像处理中的应用[J].测绘通报,2013(11):71-73.
[3]吕立蕾,张卫兵,胡树林,等.低空无人机航摄系统在长距离输油(气)管道1∶2 000带状地形图测绘中的应用研究[J].测绘通报,2013(4):42-45.
[4]赵星涛,胡 奎,卢晓攀,等.无人机低空航摄的矿山地质灾害精细探测方法[J].测绘科学,2014(6):49-52.
[5]李雷,张海涛,李 兵.无人机影像在大面积1∶2 000地形图测绘中的应用研究[J].测绘通报,2012(Z1):457-461.
[6]王佩军,徐亚明.摄影测量学[M].武汉:武汉大学出版社,2010.
[7]张力,张祖勋,张剑清.Wallis滤波在影像匹配中的应用[J].武汉测绘科技大学学报,1999(1):24-27.
[8]LOWE D G.Object recognition from local scale-invariant features[C]//Proceedings of the Seventh IEEE International Conference on Computer Vision,Corfu,1999:1150-1157.
[9]LOWE D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,2(60):91 -110.
[10]GB/T23236-2009,数字航空摄影测量空中三角测量规范[S].
[11]GB/T17278-2009,数字地形图产品基本要求[S].