小型离网式正弦波风力发电控制系统设计
2015-03-17高素玲张庭亮杨军平
高素玲,张庭亮,杨军平
(安阳工学院 电子信息与电气工程学院,河南 安阳 455000)
小型离网式正弦波风力发电控制系统设计
高素玲,张庭亮,杨军平
(安阳工学院 电子信息与电气工程学院,河南 安阳 455000)
风力发电技术与其它的可再生能源发电技术相比有其独特的优点,因此有其独特的消费群,拥有很大的潜力和辉煌的未来。分析了正弦波风力发电控制系统的整体结构及原理,设计了以PIC单片机为核心的小型单相正弦波风力发电控制系统,重点对控制系统进行了优化。通过Matlab仿真分析,验证了该系统的可行性,该系统运行可靠,其稳态性能和动态性能良好。
风力发电;自举电路;全桥逆变;脉宽调制
0 引 言
目前,随着各国对清洁能源产业的重视,风电产业发展迅速。国际上许多大的投资公司和风力发电设备制造企业正在对大型风电设备进行投资和技术研发。世界上已运行的风力发电机组单机最大容量已达5 MW,且单机容量还在不断地提高。但大容量的兆瓦级风力发电集中供电也受到很多不利因素限制,如风机安装地要求风速高、资金投入大、电网输送问题、风机安装不方便、电力调度控制困难等。而与大型风力发电方式相比,中小型风力发电在这方面有一定的优越性。对风速要求较低,平均风速达到4 m/s(测风高度10 m)即可;占地面积小,路边、房屋都能安装;机组部件少,运输、安装都很方便。因而中小型风力发电逐渐受到人们的重视,其市场和应用前景广阔。开展中小型风力发电控制技术的研究,对风能的开发利用、相关技术水平的提升、能源的优化配置和环境污染问题的解决,具有重大意义[1]。
1 系统总体设计
本系统主要由IR2110自举升压(驱动电路)、单相全桥逆变、欠压、过流、过载检测以及PIC18F2331单片机核心控制单元等几部分构成。利用IR2110自举升压为逆变桥MOSFET供电,可节省两个电源。PIC18F2331单片机输出互补的方波和SPWM波以控制逆变桥中功率管MOSFET开通和关断,产生所需SPWM波形[2],再通过LC滤波系统,得到正弦波。系统采用闭环控制环节,利用PIC18F2331单片机软件控制PI调节得到所需要的正弦波幅值,并检测电压电流是否超过系统允许的范围。系统总体方案框图见图1。
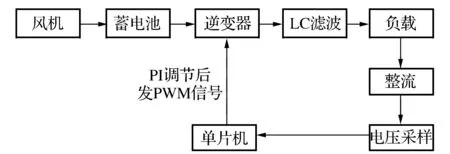
图1 系统总体结构框图Fig.1 System overall structure block diagram
2 系统工作原理
本设计为独立运行风力发电系统。一套独立运行风力发电系统由风力发电机、耗能负载、整流器、控制器、蓄电池、逆变器和负载等组成[3]。风力发电机输出交流电,通过整流变为直流电,经控制器的控制,将直流电储存在蓄电池中。通过单片机控制功率管的导通和关断发出PWM波,变为交流电,通过LC滤波,输出所需要的正弦交流电。控制器除了控制风力发电机对蓄电池的充电外,还包括对蓄电池向负载放电的管理。风力发电系统的工作原理结构框图见图2。
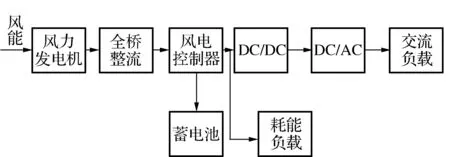
图2 系统工作原理结构框图Fig.2 Structure diagram of system working principle
任何电压调节系统都以电压为给定量,输出电压实时跟随给定值变化。一般来说,电压闭环控制系统可以是单闭环系统,也可以是双闭环系统。本设计的闭环控制采用的是电压单闭环系统。
电压调节器的作用是对给定电压与反馈电压值差按一定规律进行运算,并通过运算结果对输出电压进行控制。在电压的闭环控制中,电压调节器一般采用PI调节器。常规的模拟PI控制系统原理框图见图3。该系统由模拟PI调节器和被控对象组成。图3中,r(t)是给定值,y(t)是系统的实际输出值,给定值与实际输出值构成控制偏差e(t)。

(1)
e(t)作为PI调节器的输入,u(t)作为PI调节器的输出和被控对象的输入。模拟PI控制器的控制规律为:
(2)
式中KP为比例系数;TI为积分常数。
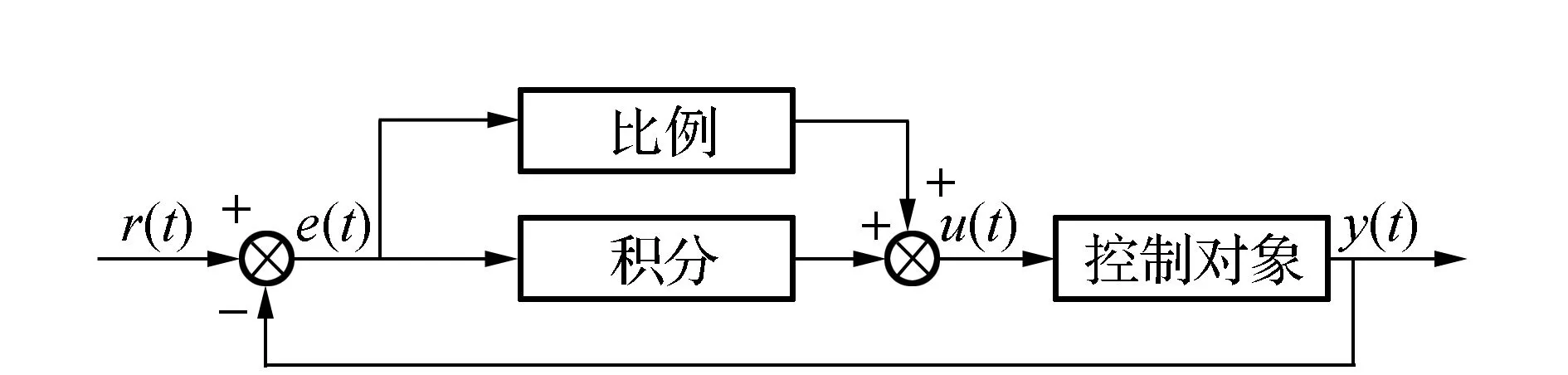
图3 模拟PI控制原理图Fig.3 Simulation PI control diagram
在计算机控制系统中,PID控制是用计算机软件来实现的,因此它的灵活性很大,一些原来模拟PID控制器中无法实现的问题,在引入计算机后,只要通过软件处理就可解决。本系统中使用的是数字PI调节器,用程序取代PI模拟电路,用软件取代硬件。
将式(2)离散化处理就可得到数字PI调节器的算法:
(3)
或:
(4)
式中k为采样序号,k=0,1,2,…;uk为第k次采样时刻的输出值;ek为第k次采样时刻输入的偏差值;KI为积分系数,KI=KP/TI;u0为开始进行PI控制时的原始初值。
为了消除积分饱和带来的不利影响,可使用防积分饱和PI调节器,见图4,算法见式(5)。
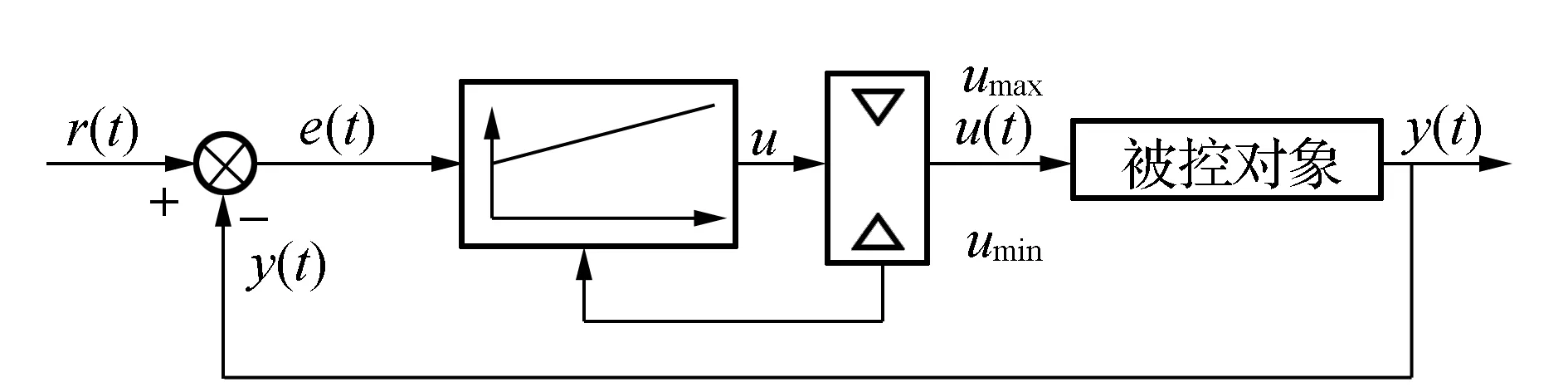
图4 防积分饱和PI调节器Fig.4 Anti integral saturation and PI regulator
(5)
式中K1=KPT/T1;积分饱和修正系数KC=K1/
KP=T/T1。
3 硬件系统设计
3.1 PIC核心控制单元设计
本系统以PIC18F2331单片机为核心控制单元。利用PIC单片机的软件编程实现SPWM波的输出,A/D数模转换,PID反馈调节等功能。PIC18F2331单片机为28引脚封装,其除去4个电源引脚外,其余引脚均为复用引脚,因此在使用时,应使用软件对其复用功能进行编程,屏蔽其它功能,保证单片机的正确运行[4]。本系统核心控制单元PIC18F2331单片机的电路接线图见图5。

图5 系统核心控制单元Fig.5 System core control unit
3.2 反馈单元设计
本设计中由于风机发出的电能不稳定,要求蓄电池储能的电压控制在80~120 V,超过此范围时,单片机产生A/D中断,禁止发PWM波[5]。反馈环节原理图见图6。Ud即为蓄电池储能,将蓄电池中的直流电压通过逆变后,经升压变压器输出220 V交流电,交流220 V经降压变压器变为交流17 V,通过整流后输出直流电压,经过电阻分压以及稳压管的稳压使其得到稳定的5 V电压信号,从而送入单片机的RA3口的A/D转换通道,经过PI调节后,通过单片机输出的PWM信号控制开关管的通断。即当直流侧的电压升高时,经过上述一系列电能的变换,单片机发出的PWM控制信号控制开关管的通断时间,从而降低逆变输出电压,使负载侧电压稳定在220 V。
3.3 逆变电路设计
逆变系统的核心是完成逆变功能的逆变电路,此外逆变系统还需要产生和调节驱动脉冲的电路即控制电路,还要有保护电路、辅助电源电路、输入电路和输出电路等。这些电路构成了逆变系统的基本结构[6-7],其系统结构框图见图7。
逆变电路的工作原理见图8。单相正弦逆变电路主要由开关器件构成的逆变桥和LC输出滤波器组成。当开关管VT2和VT3导通时,输出电压为
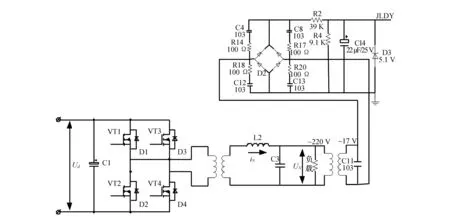
图6 PWM控制信号的反馈环节Fig.6 Feedback link of PWM control signal
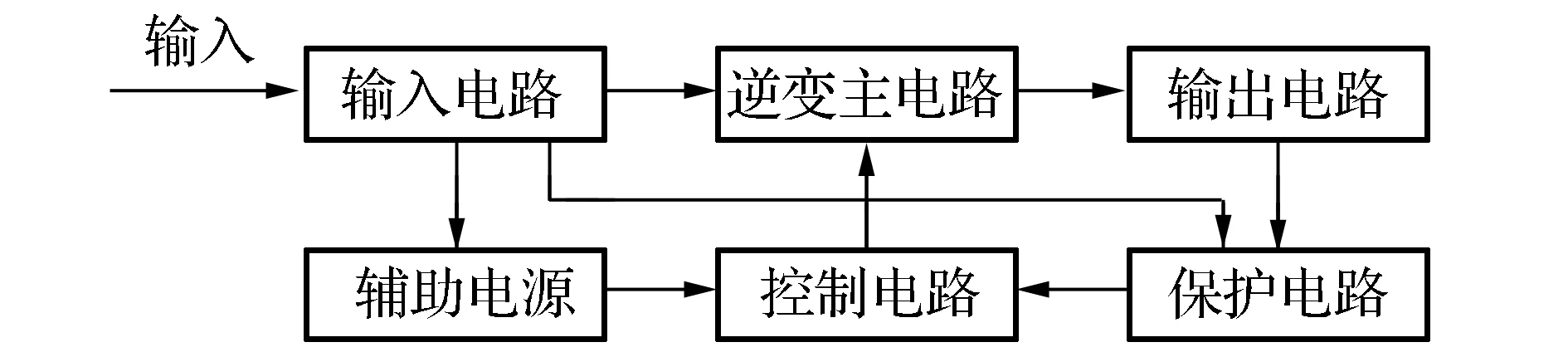
图7 逆变控制系统的基本结构Fig.7 Basic structure of inverter control system
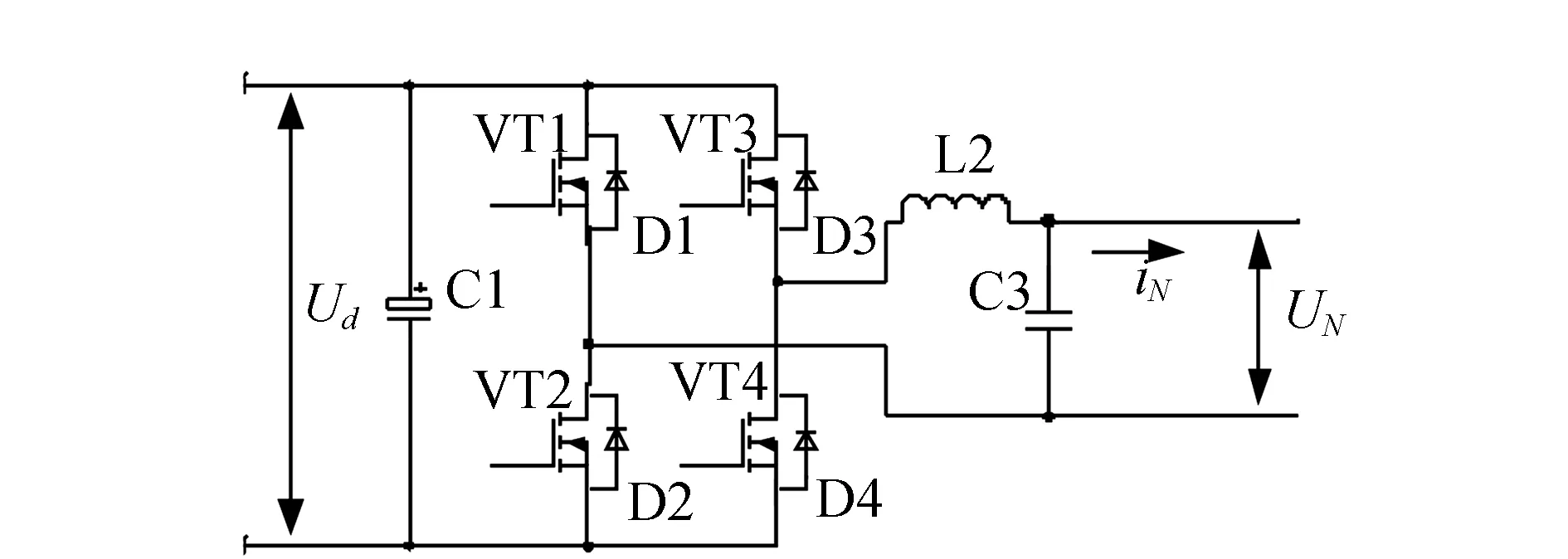
图8 单相逆变电路图Fig.8 Single-phase inverter circuit diagram
正,其幅值为Ud;当开关管VT1和VT3导通时,输出电压为负,其幅值也为Ud,这样通过对开关管通断控制,逆变电路输出正负交替的交流电压。
要VT1、VT2不同时导通,因此要保证上下两管发互补方波,VT3、VT4发互补的PWM波,为防止同一桥臂上的两个功率开关管同时处于导通状态而出现短路,要加入死区电路,即同一桥臂的开关管关断延迟几微秒后,另一管才导通,此时需要由二极管D1~D4进行续流。逆变后的输出电压要经过滤波器滤波,滤除高频分量,从而形成标准的正弦波电压。
3.4 LC滤波电路设计
在PWM逆变电路输出经升压后的电压有很多谐波成分,需要用LC滤波电路滤除谐波。而LC滤波的截止频率一般为基波频率的10~15倍[8]。
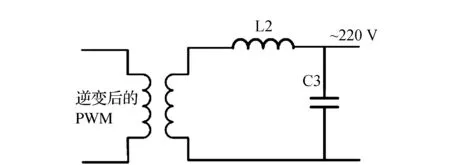
图9 滤波电路Fig.9 Filter circuit
3.5 保护单元设计
控制系统离不开完善的保护措施,保护电路主要有直流侧过压保护、直流侧欠压保护、过载保护、短路保护等。过流保护电路见图10。
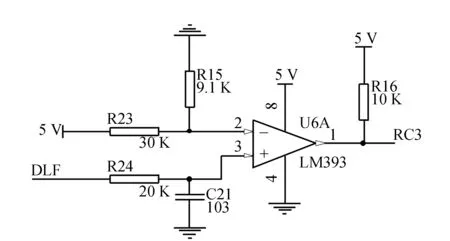
图10 过流保护电路Fig.10 Overcurrent protection circuit
4 系统软件设计
4.1 主程序设计
主程序开始前首先关闭中断,同时对A/D、PWM等功能模块和变量进行初始化,对程序中所涉及到的变量进行定义,之后打开中断,开始循环等待中断事件的发生。
4.2 PI调节子程序
计算机直接数字控制系统大多采样数字控制系统。进入计算机的连续时间信号,必须经过采样和量化后变成数字量,方能进入计算机的存储器和寄存器。程序中利用给定值来判断是否含有偏差,从而更新状态变量,求取偏差值,根据所得偏差进行PI调节,更改占空比寄存器。PI调节程序框图见图11。
4.3 A/D转化及故障保护子程序
程序中利用TIMER5定时器启动A/D转换,转换结果右对齐。PIC18F2331单片机将电压或电流模拟信号转换成数字信号加以检测是否过流、欠压或过载。然后通过PI调节使电流电压稳定在系统允许的范围内,从而达到故障保护的目的,并在
故障发生时有指示灯的提示[9]。A/D转换与故障调节程序流程见图12。
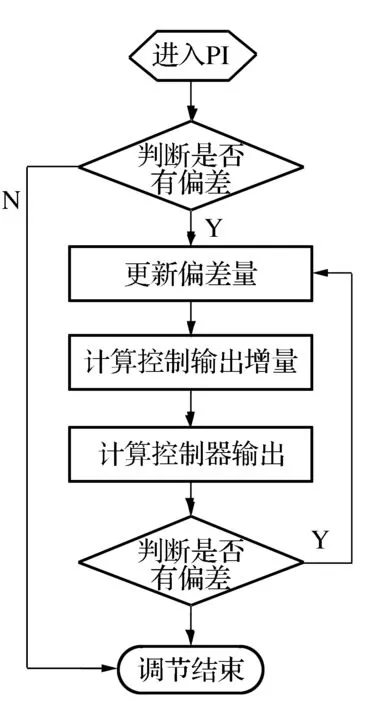
图11 PI调节子程序框图Fig.11 PI regulation subroutine block diagram
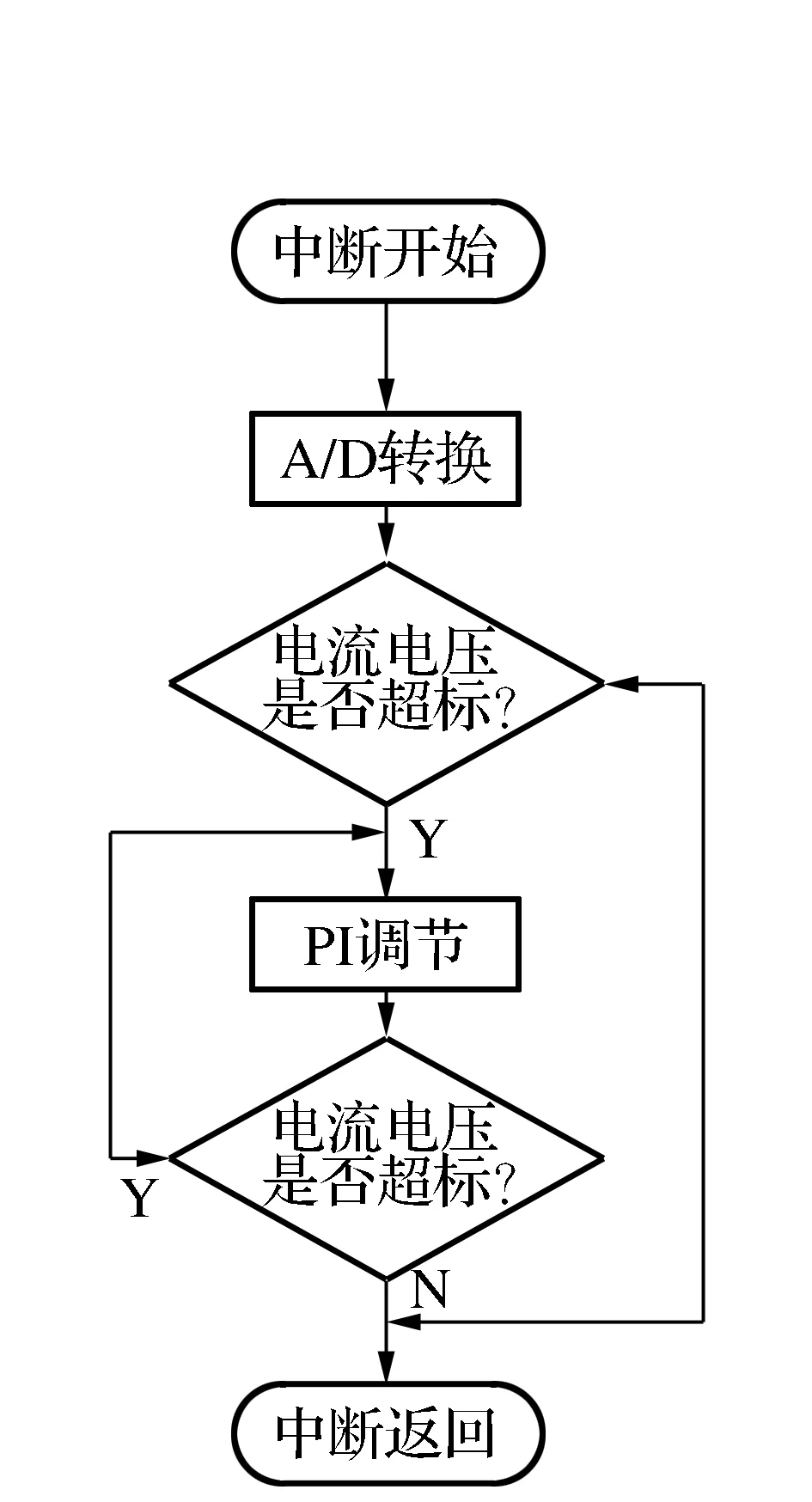
图12 A/D转换与故障保护程序流程图Fig.12 A/D conversion and fault protection program flow chart
5 系统仿真
在风电控制系统设计完之后,对系统的部分原理图进行了软件仿真。其原理见图13。
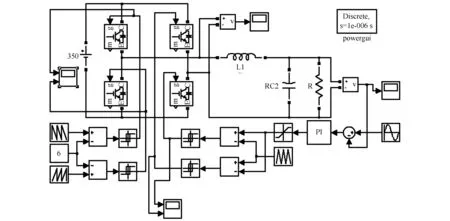
图13 带PI调节的PWM逆变电路仿真原理图Fig.13 Simulation principle diagram of PWM inverter circuit with PI
直流电源U=85 V;R=10Ω;L=6.2 mH;C=10 μF;给定正弦波幅值为80 V。
直流信号经逆变电路输出的SPWM波形和经过LC滤波后的正弦波仿真结果见图14。
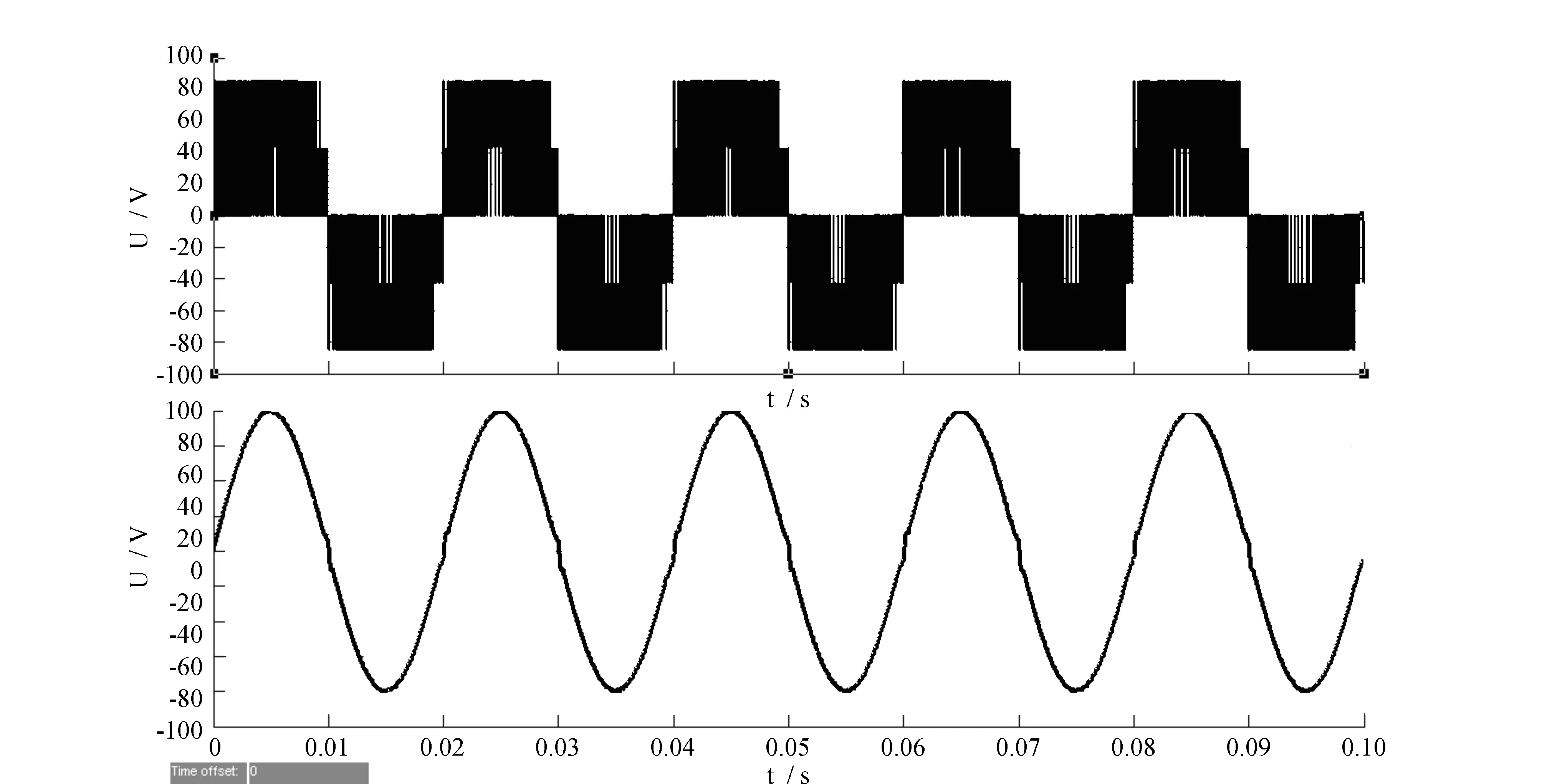
图14 直流侧逆变后滤波前后的仿真波形Fig.14 Simulation waveform of DC side inverter before and after filtering
由图14可见,SPWM波经滤波后生成平稳的正弦波,从波形可见滤波器滤波效果良好。经测试证明当输入直流电压85~120 V时电路输出电压仍然非常平稳并运行正常,说明在程序中PI调节发挥了作用,电路闭环控制效果良好,达到了预期目的。
6 结 论
本设计在对系统工作原理进行深入分析的基础上,进行了离网式风力发电控制系统设计。硬件部分由PIC核心控制单元、反馈单元、逆变单元、基于自举技术的驱动电路、电源电路及保护电路等组成;控制系统的软件设计,包括主程序,PI调节子程序,A/D转换模块及故障保护子程序设计;最后进行了Matlab仿真,结果表明,此系统安全可靠,性能良好,达到了设计要求。
[1]杨 欢,赵荣祥,辛焕海,等.海岛电网发展现状与研究动态[J].电工技术学报,2013,28(11):95-104.
[2]李俊峰,蔡丰波,乔黎明,等.2014中国风电发展报告[R].北京:中国循环经济协会可再生能源专业委员会,2014.
[3]Chinchilla M, Arnaltes S, Burgos J C. Control of permanent magnet generators applied tovariable-speed wind-energy systems connected to the grid[J]. IEEE Transactions on Energy Conversion, 2006, 21(1): 130-135.
[4]张 兴,陈 玲,杨淑英.离网型小型风力发电系统逆变器的控制[J].电力系统自动化,2008,32(23):95-99.
[5]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2006:124-128.
[6]高晗璎,申 娟,刘京波.直驱式风力发电并网逆变器的控制策略研究[J].电测与仪表,2013,50(12):56-59.
[7]Gao Suling,Duan Qegong,Yang Junping, et al.Design and simulation of the asynthvonous motor digital variable frequency speed regulation system[J].Journal of Natural Science of Heilongjiang University,2015,32(5):693-700.
[8]曾 嵘,年 珩.离网型风力发电系统逆变器控制技术研究[J].电力电子技术,2010,44(6):5-6.
[9]赵卓鹏,贾石峰.电流滞环跟踪PWM逆变器控制仿真研究[J].电气传动自动化,2011,33(2):1-18.
Design of small off-grid type sine wave control system of wind power
GAO Su-Ling, ZHANG Ting-Liang,YANG Jun-Ping
(Electronic Information and Electrical Engineering College, Anyang Institute of Technology,Anyang 455000,Henan,China)
Wind power technology has its unique advantages compared with other renewable energy power generation technology, so has its own unique consumer group,own great potential and glorious future. The structure and principle of sine wave wind power control system are analyzed, a small single phase sine wave wind power control system based on PIC microcontroller is designed,and the control system is optimized.The feasibility of the system is verified by Matlab simulation, the system run reliably, and its steady-state performance and dynamic performance is good.
wind power; bootstrap circuit; full-bridge inverter; pulse width modulation
10.13524/j.2095-008x.2015.04.066
2015-09-16;
2015-10-12
安阳工学院青年科研基金项目(QJJ2014018)
高素玲(1983-),女,河南滑县人,讲师,硕士,研究方向:风力发电、电子电路设计、系统仿真,E-mail:gaosuling163@163.com。
TP273
A
2095-008X(2015)04-0062-06