无刷直流电机的大惯性负载的模糊PI控制
2015-03-17彭梦光
彭梦光
(上海理工大学光电信息与计算机工程学院,上海200093)
0 引 言
在永磁无刷直流电机的应用领域,大量的系统带有大惯性负载,例如螺旋桨、天线以及应用在航天航海方面的雷达[1],如果负载转动惯量是转子转动惯量的100倍甚至更多,那这个负载就称之为大惯性负载。在无刷直流电机启动时,电机的速度控制系统会遇到以下一些问题:
(1)根据T=J(d w/d t),由于大惯性负载的存在,从而产生很大的惯性转矩,电机控制系统的稳定性将被削弱,驱动器的性能也将受到很大的影响。
(2)当系统有一个大惯性负载时,电机控制系统的机械时间常数大,从而导致控制系统响应时间长,性能很不稳定。
因此,许多学者和专家都致力于大惯性负载电机控制方法的研究。有人提出了一种参考模型自适应的方法[2],这种方法不仅非常有效的抑制影响时变的参数,而且还可以改善控制系统的精度;另外一种是在滑模控制方法[3]中解决了永磁同步电机驱动很大的转动惯量和变化的转动惯量问题,用滑模控制来抑制转动惯量改变对系统性能的影响。这些方法更好的应用于大惯性负载电机的速度控制,然而负载转动惯量和转子转动惯量的区别并不是很大,于是我们提出了模糊PI控制方法,这是一种传统PI算法结合了模糊选择的控制方法,解决了无刷直流电机带有大惯性负载的速度控制问题。
1 无刷直流电机的数学模型
本文假设无刷直流电机的定子绕组为三相星形连接,两两导通方式,驱动电路采用三相全桥逆变电路,在理想情况下无刷直流电机的感应电动势为120°的梯形波,相电流为120°方波,同时为了便于分析,可以假定[4]:
(1)三相绕组完全对称,定子电流、转子磁场也对称分布;
(2)忽略齿槽效应,不考虑电枢反应等的影响;
(3)忽略磁路饱和,涡流和磁滞损耗不计;
(4)不考虑转子阻尼绕组,永磁体不起阻尼作用。
那么可以建立其电压、转矩、状态方程以及等效的BLDCM电路。
电压平衡方程如下:
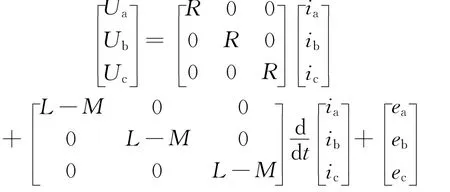
式中,Ua、Ub、Uc为三相定子电压(V);ea、eb、ec为三相定子的反电动势(V);ia、ib、ic为三相定子相电流(A);L为三相定子自感(H);M为三相定子绕组之间的互感(H);R为三相定子绕组的相电阻(Ω)。
无刷直流电机的电磁转矩是由定子绕组电流和转子磁场产生的,可以表示为:

式中,ω为BLDCM 的角速度(rad/s)。
电磁转矩与定子绕组相电流成正比关系,所以改变逆变器输出电流的大小等同于控制电磁转矩。电磁转矩、负载转矩和速度的关系可以描述成机械运动方程:

式中,B为阻尼系数(N·m·s/rad),J为电机的转动惯量(kg·m2),TL为负载转矩(N·m)。
2 无刷直流电机控制系统的设计
传统的PI控制器是使用最广泛的永磁无刷直流电机控制器,其控制算法简单,易于实现,稳态误差很小;然而它很难实现驱动大负载且要求高精度、高动态响应性能的电机控制器。
目前,模糊控制[5-7]广泛应用于工程领域,它是一种智能控制方法,不需要建立精确的控制对象的数学模型,而是利用经验来采取合适的控制策略。模糊控制可以很好的处理不确定性、非线性、时变性和耦合性系统,所以能适用于无刷直流电机控制系统。它的动态性能优于传统的PI控制方法。但事实上,两输入单输出的模糊控制器是一种带有稳态误差[8]的PD控制器,为了解决这个问题,我们选择PI控制器作为附加的控制器来构成一个模糊控制器。
为了让无刷直流电机具有良好的动态性能,本文采用双闭环控制方法,控制系统框图见图1。外环是速度环,通过采用模糊PI控制来调节速度,内环是电流环,采用PI控制器直接控制电流。
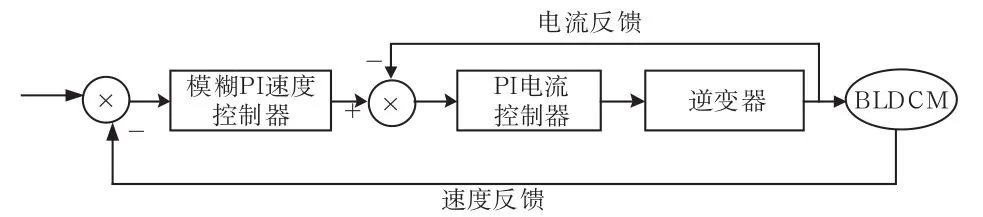
图1 控制系统框图
3 模糊PI控制器设计
模糊PI控制器是由传统PI控制器和模糊控制结合组成的,其结构如图2所示。该控制器是一个两输入单输出的模糊PI控制器,控制器的输入是速度误差和速度误差的导数,输出是内环的参考电流。ng是目标速度,nf是反馈速度,uf是模糊控制器的输出,uPI是PI控制器的输出。
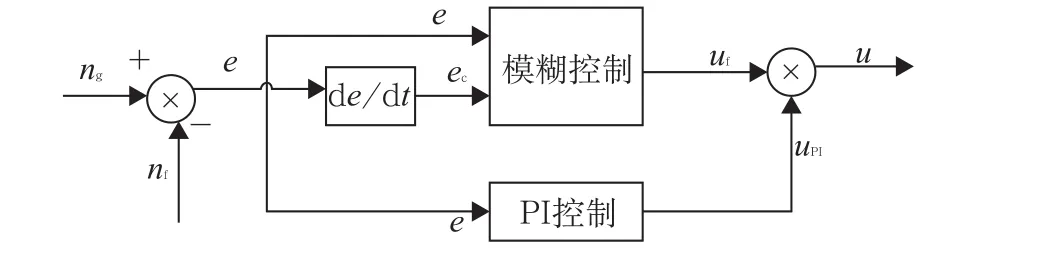
图2 模糊PI控制器结构
(1)输入和输出变量的模糊化
输入域是速度调节的范围,输出域是电流变化的范围,两者都跟无刷电机的参数有关,输入和输出域乘以各自相关参数等于输入和输出的模糊域,模糊域的输入(E,EC)和输出(Uf)作为模糊变量的子集选择{NB,NM,NS,ZE,PS,PM,PB},为了简单起见,用三角函数作为隶属函数,隶属函数的E,EC和Uf如图3所示。
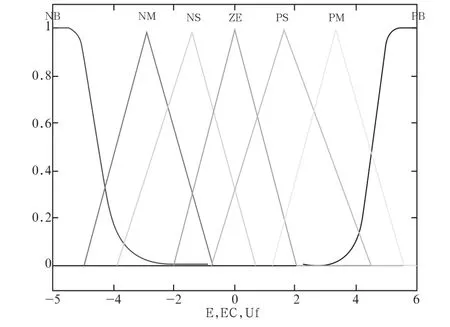
图3 隶属函数的输入和输出
(2)模糊控制规则设计
模糊控制规则是一系列的模糊条件,这是基于一些有经验的开发者和专家利用他们的知识和经验总结出来的语句,根据人工经验,基本的控制规则如下:
a.如果电机转速等于目标速度,参考电流保持目前大小不变。
b.如果电机转速高于目标速度,就应该减小当前电流,速度增加的越大,电流就减小的越多。
c.如果电机转速低于目标速度,就应该增加当前电流,速度减小的越多,电流就增加的越多。
基于这些基本的控制规则,模糊控制规则可以用if,then的语句表达,如表1所示。

表1 模糊控制规则表
(3)模糊推理
采用曼丹尼推理法作为模糊推断原理,根据表1所示的模糊控制规则,当输入给定时,输出的模糊集可以通过曼丹尼推理法得到,这种模糊集的输出必须去模糊化。去模糊化的输出采用加权平均法公式计算:式中,Ufi是其中一个模糊输出语言变量,Uc(Ufi是对应于Ufi的模糊隶属函数。

(4)模糊PI控制器
在模糊控制中,因为输入和输出分为几个区域,从而导致产生稳态误差,所以将模糊逻辑算法和PI控制原理结合起来,去消除稳态误差。模糊控制器和PI控制器调整各自的电机速度,模糊和PI控制器输出的总和作为最终的控制结果,稳态误差得以消除,系统能有效的减少超调,同时能缩短系统响应时间。
4 仿真和分析
本文以BLDCM驱动螺旋桨齿轮减速器为例,建立模糊控制系统的仿真模型,借助Matlab和Simulink[9-10]平台进行仿真,电机和螺旋桨仿真参数如表2所示。

表2 电机和负载参数
由于JL-JM=222,所以该螺旋桨是大惯性负载,JM可以忽略不计。
(1)仿真实验
仿真步骤如下,首先,电机速度设置为800 r/min,电机转速变得稳定后,在0.3 s内加速到1 500 r/min,当系统再次稳定后,在0.6 s内减速到1 200 r/min。为了与其他速度控制器比较,传统PI控制方法和模糊PI控制方法都采用实时模拟速度控制,速度响应曲线如图4所示,模糊控制的转矩曲线如图5所示。

图4 速度响应曲线

图5 模糊PI控制的转矩响应曲线
(2)仿真结果分析
模糊PI控制和传统PI控制的仿真结果对比如表3所示。

表3 仿真结果
从表3中很明显的可以看出,模糊PI控制的动态和稳态响应要优于传统PI控制系统,图5中显示当系统处于稳态状态时,转矩波动很小。
5 总 结
模糊PI控制方法结合了模糊控制算法和传统的PI控制方法的优点。本文中模糊PI控制器是专为驱动大惯性负载而设计的,从仿真结果来看,其动态响应性能优于传统PI控制。利用模糊PI控制方法,在电机启动、加速和减速的时候,控制系统有很好的控制效果,展示出良好的快速响应性能。在实际应用中,这种控制方法是一种更好的解决无刷直流电机驱动大惯性负载问题的方案。
[1] MA Jing,LV Feng-hua.Synchronization and tracking control scheme of ultra-low velocity and high-inertia servo system[J].Equipment Manufacturing Technology,2008,1:64-65.
[2] HUANG Li-lain,WANG Mao.An adaptive control method for test table's axes with time-variant load moment of inertia[J].Journal of Chinese Inertial Technology,2002,10:pp.70-72.
[3] Li Yi,Guo Hong,Yu Yongqiang.Sliding mode control of permanent magnet synchronous motor with great inertia load[J].Journal if Beijing University of Aeronautics and Astronautics,2007,33(10):1208-1211.
[4] Li Zhongming,Liu Weiguo,Liu Jinglin,Dou Manfeng.Rare earth permanent magnet electrical machines[M].National Defense Industry Press,1999.
[5] Ji Zhi-Cheng,Shen Yan-Xia,Xue Hua.Study on the adaptive fuzzy control for brushless DC motor[J].Zhongguo Dianji Gongcheng Xuebao,2005,25(5):104-109.
[6] WANG Mianhua.The fuzzy-PI control of switched reluctance motor based on DTC[C].2009 International Conference on Measuring Technology and Mechatronics Automation,2009:606-609.
[7] Wang Hsui-Ping,Liu Yen-Tsan.Integrated design of speed-sensorless and adaptive speed controller for a brushless dc motor[J].IEEE Transactions on Power E-lectronics,2006,21(2):518-523.
[8] Li Guoyong.Intelligent control and matlab implementation[M].Publishing house of electronics industry,2005.
[9] Jiang Haibo,Cui Xinyi,Zeng Lingbo,Zhou Huijun.Modeling and simulation of brushless DC motor fuzzy control system [J].Journal of Xi'an Jiaotong University,2005,39(10):1116-1120.
[10]Huang Yongan,Ma Lu,Liu Huimin.MATLAB7.0/Simulink6.0 modeling and simulation development and advanced engineering applications[M].Beijing:Tsinghua University Press,2005.
