基于面装式永磁同步电机的转炉炼钢氧枪位置控制
2015-03-15蔡海林马鞍山钢铁股份有限公司原燃料采购中心安徽马鞍山243003
蔡海林(马鞍山钢铁股份有限公司原燃料采购中心,安徽马鞍山243003)
基于面装式永磁同步电机的转炉炼钢氧枪位置控制
蔡海林
(马鞍山钢铁股份有限公司原燃料采购中心,安徽马鞍山243003)
【摘要】在转炉炼钢过程中的一个重要工艺是吹氧,传统的氧枪传动装置采用直流调速控制系统,随着电力电子技术的发展,交流传动系统以其优越的控制性能逐渐取代了直流调速系统。主要研究了基于面装式永磁同步电机的转炉炼钢氧枪位置控制系统。在整个控制系统中,通过对面装式永磁同步电机的控制,实现了氧枪位置的精确控制,提高了系统效率。
【关键词】面装式永磁同步电机;转炉炼钢;氧枪位置控制
1 引言
对于转炉炼钢的自动化系统而言,电气传动系统也是整个系统的核心,拥有一套稳定可靠、安全高效的传动系统是转炉炼钢成功的有力保障[1]。传统的转炉炼钢中的氧枪和倾动装置则采用直流调速系统,然而直流电机的制造和维护成本高,且可靠性较差[2]。随着电力电子技术和设备、数字芯片以及现代控制技术的发展,交流调速渐渐取代了直流调速系统[3],采用矢量控制技术的交流调速系统具有和直流调速系统相媲美的控制性能,且整个系统的维护成本低,效率高。
近年来,随着永磁体材料的开发,永磁同步电机以其高功率密度、高转矩密度、高效率的特点成为交流传动系统的主流驱动电机,因此本文主要研究将面装式永磁同步电机应用于转炉炼钢中氧枪的位置控制系统。
一般的,在转炉炼钢过程中保持氧枪在熔池面以上的预定高度,因此则需要控制氧枪的位置。本文采用基于面装式永磁同步电机的传动系统,其位置控制系统包括位置环、速度环和电流环三个闭环结构[4],本文通过设计SMPMSM的三环控制器,提出了基于SMPMSM的转炉炼钢氧枪位置控制方法。最后,利用MATLAB/Simulink仿真平台对SMPMSM传动系统进行仿真,验证了提出的传动系统能够将氧枪控制在预定位置,从而实现了精确位置控制。
2 面装式永磁同步电机数学模型
同步旋转d-q坐标系下,SMPMSM的电压方程可以表示为:

其中,Vd、Vq和id、iq分别表示d-q坐标系下的电机电压和电流,棕e表示电机转子电角速度,Rs是电机定子电阻,Ls是电机同步电感,追f是永磁体磁链。
同样的,SMPMSM的转矩方程表示为:

其中,np是电机极对数。由SMPMSM转矩方程可以看出,通过控制d-q坐标系下的电机q轴电流iq就可以控制电机的输出转矩。
SMPMSM的运动方程为:


SMPMSM位置可以表示为:

由电机转子位置信息,再根据传动机构的特征,可以相应地表示出氧枪在垂直方向上的具体位置,从而控制氧枪的升降。
3 基于SMPMSM的转炉炼钢氧枪位置控制
3.1SMPMSM矢量控制原理
对于交流电机的控制方式,大多采用矢量控制,其基本原理是:利用坐标变换原理,将三相交流电机等效到同步旋转坐标系下,因此电机的定子电流分解为直轴电流分量id和交轴电流分量iq,通过控制电机的交轴电流分量达到控制电机转矩的目的。
三相静止坐标系到两相旋转坐标系下的坐标变换公式为:

其中,ia、ib、ic分别为电机定子三相电流,兹e是电机转子电角度。
对于面装式永磁同步电机,如公式(2)所示,其转矩只与交轴电流分量iq有关,因此,通过控制直轴电流分量id=0,从而控制交轴电流分量iq就能控制电机转矩。
3.2SMPMSM位置、速度、电流三闭环控制结构
设计的SMPMSM控制系统选取位置、速度、电流三闭环的控制方案。内环为电流环,采用d、q轴双PI调节器的控制结构,由指令电流与反馈电流的误差经过PI调节器输出电压指令,当误差增大时,通过增大电压指令调节电机电流,从而缩小误差,这种通过误差的闭环反馈结构可以控制电机的实际电流准确跟踪指令电流。
上一节已经说明,根据矢量控制原理,电机的转矩只与q轴电流分量有关,因此控制电机d轴电流分量id=0,通过调节就能调节电机的转矩,所以设计的控制结构通过速度环产生相应的q轴电流指令,然后利用电流PI调节器控制电机电流,从而控制电机的输出转矩。外环为位置环和速度环,均采用传统的PI调节器控制结构,位置环PI调节器输出速度给定值,同时限制最大速度;速度环PI调节器输出q轴电流指令值,同时限制最大电流。整个位置控制系统结构框图如图1所示。
电机由直流电源通过三相电压型逆变器供电。整个矢量控制算法通过电流传感器检测电机三相电流,再由坐标变换生成d、q轴电流,利用PI调节器产生d、q轴参考电压,再由空间矢量脉宽调制算法生成逆变器三相驱动信号,从而驱动逆变器生成三相交流电压供电机运行。
4 系统仿真
传动系统采用额定功率为18 kW,额定转速为3000 r/min的SMPMSM,电机参数如下:
极对数:4
同步电感(Ls):0.239 mH
永磁体磁链(追f):0.065 Wb。
利用MATLABSimulink仿真软件对提出的SMPMSM传动系统进行仿真研究。其中,电流环采用PI调节器,d、q轴电流PI控制器参数为:Kpd=Kpq=0.6、Kid=Kiq=32.67。
SMPMSM位置控制系统仿真结构图如图2,SMPMSM采用矢量控制方式,控制电机直轴电流id=0,而电机交轴电流指令通过速度PI调节器获得,速度给定值则通过位置PI调节器获得。SMPMSM位置响应波形如图3所示。
由三环控制系统,电机位置迅速转到预定位置处,调节时间约为1.2 s。而SMPMSM速度与转矩响应波形如图4所示。

图1 SMPMSM位置控制系统结构框图

图2 传动系统仿真结构图
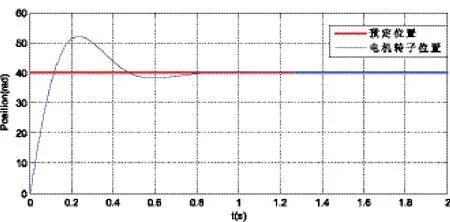
图3 SMPMSM位置响应波形

图4 SMPMSM速度与转矩响应波形
5 总结
转炉炼钢作为目前最主要的炼钢方法,其高效精确的传动装置是炼钢成功的关键因素之一,本文结合现代交流传动技术的优势和特点,提出了基于面装式永磁同步电机的转炉炼钢氧枪位置控制方式。利用面装式永磁同步电机的特点,通过矢量控制结构来控制电机的输出转矩,采用位置、速度、电流三闭环控制结构架构了整个传动系统。最后通过仿真验证了基于面装式永磁同步电机的传动系统能够迅速、准确地将电机控制到指令位置,能够实现氧枪的精确位置控制,提高系统的效率。
[参考文献]
[1]许文派.转炉炼钢学[M].北京:冶金工业出版社,1988.
[2]汤蕴缪.电机学[M].北京:机械工业出版社,2011.
[3]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[4]秦忆.现代交流伺服系统[M].武汉:华中理工大学出版社,1995.
Converter Oxygen Lance Position Control Based on Surface -Mounted Permanent Magnet Synchronous Motor
Cai Hailin
(The Raw Materials and Fuels Purchase Center of Maanshan Iron & Steel Co. Ltd., Maanshan, Anhui 243003, China)
[Abstract]Oxygen blowing is an important process in converter steel smelting. Tradition-al oxygen lance drive device adopts DC speed adjusting control system, but with rapid devel-opment of electronic technology for electricity power system, AC lance drive system with its excellent control performance has gradually replaced DC speed adjusting system. The oxygen lance position control system for converter based on surface-mounted permanent magnet syn-chronous motor is studied. In the entire control system, precision control of the lance position is achieved by control of the surface-mounted permanent magnet synchronous motor, which improves the efficiency of the system.
[Keywords]surface-mounted permanent magnet synchronous motor; converter smelting; oxygen lance position control
作者简介:蔡海林(1980-),男,2005年毕业于安徽理工大学计算机科学与技术专业,电气工程师,现从事远洋物流管理工作。
收稿日期:2015-06-16
【中图分类号】TM3
【文献标识码】B
【文章编号】1006-6764(2015)10-0068-04
