筒仓滑模偏扭控制技术
2015-03-15李小强石恩河
□文/李小强 石恩河
筒仓滑模偏扭控制技术
□文/李小强 石恩河
文章通过对黄骅港三期工程筒仓滑模施工垂直度和扭转度的监测,介绍了筒仓滑模偏扭监控方法,对筒仓滑模施工中的偏扭原因进行了分析,阐述了滑模偏扭预防措施并讨论了滑模偏扭控制技术措施。
滑模;监控;偏扭;筒仓
滑模偏扭控制是衡量施工质量的一个重要指标。圆形筒仓结构在滑升过程中,常常会发生操作平台中心偏移或因多向的偏移引发的平台环向扭转,因此,滑模施工技术的关键,在于控制好筒仓壁的垂直度、操作平台提升时混凝土达到的强度及滑模系统的提升速度,而且更应控制好滑模施工操作平台的中心位移及筒壁结构的扭转。
1 工程概况
黄骅港三期工程储煤筒仓位于黄骅港煤码头二期堆场西北侧,场地原为浅滩,随黄骅港的建设发展吹填造地形成。陆域形成后经塑料排水板真空预压处理,场地地形平坦。
储煤筒仓共计24座,均采用圆形的现浇钢筋混凝土结构。筒仓内直径40 m,滑模高度40.70 m,由基础、筒壁、仓底、仓壁、仓顶、仓顶廊道等组成。承台基础顶面标高5.800 m,筒仓壁厚500 mm,内附28个扶壁柱,标高范围为5.800~15.300 m,外附6个预应力张拉柱,标高范围为5.800~36.700 m,筒仓仓壁施工采用滑模施工。
2 监控方法
滑模施工操作平台滑升前,在筒仓内中心点设置20 kg的线锤,对应中心轴线点,以观测滑升过程中的垂直度;在筒仓内靠仓壁处设置4个20 kg的线锤,对应纵横轴线,以观测滑升过程中的扭曲情况。监控点布设见图1。
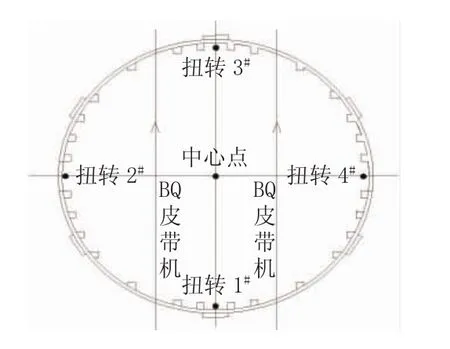
图1 筒仓监控点
在滑模过程中,安排专人负责观测,每提升一个浇灌层高度检查一次并做好记录。观测结果及时报送平台指挥,让其确定扭、倾方向,进行纠偏。随着平台的上升逐步下放线锤,如遇大风大雨时可将线锤放在小容器内,以减少摇摆。
3 监控数据
以B5筒仓滑模监控数据为例,在滑模施工过程中,每滑升一个浇筑层高度,观测一次滑升垂直度、扭转度变化情况,采用“防偏为主,纠偏为辅”的控制措施使其偏差达到规范要求。
B5筒仓滑升历经13 d自承台位置(5.80 m)开始滑升,停滑至46.50 m位置。
具体纠偏变化情况见表1。

表1 偏扭监控数据
4 偏扭问题分析
无论是何种类型的结构模板工程,在施工过程中都会发生操作平台的倾斜,导致滑模施工中产生垂直偏差,严重的可使操作平台倾覆和滑模系统破坏,造成重大安全和质量事故。同样,在滑模施工中,无论是圆形结构还是方形结构,无论是刚性平台还是柔性平台,都会发生施工平台的扭转,尤其是在圆形结构中,易产生平台旋转。
在B5筒仓仓壁滑模过程中,随着滑升高度的增加,操作平台的中心及筒壁结构均发生了一定的偏移,根据监控仓壁部位的数据成果,分析并找出了产生偏扭的主要原因。
4.1 造成施工平台中心位移的原因分析
4.1.1 模板组装
提升架在组装过程中,标高控制不好,平面内的垂直度有偏差。而这些偏差又不能够相互抵消而产生累积误差,有可能造成操作平台的倾斜。围圈组装时,各个方向上模板的锥度不一致,某个方向上偏大,在滑升过程中也会造成操作平台倾斜。施工中,局部模板上粘结的灰浆过多,摩阻力偏大,也会影响平台的平整度。
4.1.2 操作平台上荷载
滑升过程中,操作平台上的荷载分布不均匀,设备、材料、施工人员过度集中。操作平台的刚度和强度较差,容易变形,造成操作平台在滑升过程中不能保持整体平面同步提升,导致操作平台、模板等滑升系统不能正常工作,致使整体结构发生位移。
4.1.3 千斤顶
千斤顶承受的荷载不均匀,某一部位荷载偏大,滑升时下滑力偏大,可能时操作平台倾斜。千斤顶本身的行程不一致,相邻千斤顶的行程误差不能相互抵消,某一区域内行程偏大或偏小造成操作平台倾斜。
4.1.4 浇筑混凝土不合理
浇筑混凝土过程中,没有严格按照同步对称、分层交圈的方法,同时没有严格控制好混凝土浇筑时坍落度和质量,每层每圈混凝土振捣不均匀,增大混凝土出模强度的差异,由于摩阻力的变化而使操作平台产生倾斜。
4.2 造成筒仓仓壁结构扭转的原因分析
4.2.1 模板组装
如果在组装时模板缝不垂直,在圆形结构中会沿圆周向一个方向倾斜,尤其第一块安装就位模板的垂直度就更为关键,由于模板拼缝的导向作用,导致整个模板系统就会以爬杆为中心,千斤顶为沿爬杆转动一定角度,造成整个滑模系统的旋转。
4.2.2 千斤顶的影响
千斤顶组装时,如果垂直度控制不好,向一个方向倾斜的数量多于另一个方向,滑升时会造成操作平台的平移或旋转。一个爬升架平面内只布设一根爬杆,对爬杆加固不够,整个滑模系统是支撑在一个稳定性较差的柔性结构上,当滑模受到风荷载或不均匀堆载影响时,易使操作平台产生旋转。
4.2.3 其他因素影响
如果浇筑混凝土时总是沿一个方向浇筑,会导致操作平台旋转。
5 滑模施工的偏扭预防措施
1)提升架立柱支点在安装前要用水准仪抄平,相对标高控制在±1 mm左右,安装时控制好平面内外的垂直度。圆圈和模板的锥度要一致,通过控制圆圈的锥度来控制模板的锥度。
2)操作平台系统在组装时应与模板系统固定牢固,操作平台要保证组装水平。平台上的固定荷载要均匀布置,施工过程中平台上的堆料和操作人员尽量分散,材料随用随运到操作平台上。
3)应尽量将液压控制台和油箱布置在平面的中心位置,使到达区域千斤顶的油路长短大致一致或对称,使对称区域的千斤顶的给油、回油时间一致,油压一致。
千斤顶在安装时应保证其同步和垂直,在滑升过程中可用垫片来调整千斤顶的垂直度或改变其方向,来控制操作平台的倾斜或旋转。
4)浇筑混凝土时一定要不断变换浇筑方向和起始位置,克服因浇筑方向一致或前后顺序相同造成的差异。
5)模板安装时,必须使模板竖缝与上下围圈垂直,第一块模板安装时,吊正后再固定好其位置。收分模板、抽拔模板一定要沿结构均匀和等距布置,竖向模板拼装要垂直,预防板缝的导向作用使平台产生平移或旋转。
6 滑模施工的偏扭控制措施
在筒仓滑模施工中,一定要监控到位,发现筒仓结构出现偏扭时,根据筒仓结构垂直度偏差或扭转偏差的大小、方向和部位等具体情况,循序渐进,采取不同的措施加以纠正,使其正常滑升,通过施工监控总结以下几点控制措施。
1)当发现垂直度偏差超过限时,通过调整限位卡的标高成斜面,使千斤顶可以升到不同的高程,致使平台爬升时成倾斜面(≯1%),利用平台倾斜产生的倾向力矩来纠正偏差,平台倾斜程度根据平台中心偏移大小而确定,纠正偏差后正常滑升。
2)沿扭转部位的提升架位置均匀布置牵拉点,用手拉葫芦与扭转方向反向牵拉,平台提升时达到反向纠扭。
3)浇筑混凝土过程中,在偏移方向的对侧中心位置开始分两侧沿筒壁顺、逆时针两个方向对称交圈浇筑,利用先浇筑处混凝土出模强度高、摩阻力大的特点,使平台自动倾斜纠偏。根据施工过程中经验,此种控制措施效果较好。
4)改变模板竖缝的方向,有意使模板竖向拼缝向某方向倾斜,可以从根本上解决操作平台的平移和旋转。
7 结语
滑模施工是一个动态的施工过程,任何一道工序的闪失都将影响滑模施工进度和质量,必须提前做好滑升过程质量预控。滑模施工过程中操作平台产生的偏扭,应本着“防偏为主,纠偏为辅”的办法加以解决,保证滑模平台处于平稳正常状态。
本工程在滑模施工中,由于不断连续进行偏扭的监控,监控数据及时报送平台指挥,发现偏扭过大迹象时,及时采取了相应的控制措施。过程监控到位,仓壁表面平整,未发现混凝土拉裂和蜂窝麻面等缺陷,筒仓垂直度偏差最大20 mm,小于规范规定的允许值(规范允许值为滑模高度的0.1%即40 mm);筒仓扭转度偏差最大35 mm,小于规范规定的允许值(规范允许值为任意一点全高最大≯200 mm)。
[1]JGJ 8—2007,建筑变形测量规范[S].
[2]GB 50113—2005,滑动模板工程技术规范[S].
□石恩河/中交一航局第四工程有限公司。
TU755.2
C
1008-3197(2015)06-33-02
10.3969/j.issn.1008-3197.2015.06.010
2015-09-11
李小强/男,1983年出生,工程师,中交一航局第四工程有限公司,从事工程技术管理工作。
