基于VC++的超声检测运动控制系统的设计及实现
2015-03-15苗长云
韩 明,苗长云,白 华
(1.天津工业大学机械工程学院,天津300387;2.天津工业大学电子与信息工程学院,天津300387)
基于VC++的超声检测运动控制系统的设计及实现
韩 明1,苗长云2,白 华2
(1.天津工业大学机械工程学院,天津300387;2.天津工业大学电子与信息工程学院,天津300387)
提出一种基于VC++的超声检测运动控制系统的设计方案,该系统主要由工控机、运动控制系统、超声检测系统和超声水浸探头等部分组成.采用超声检测技术和运动控制技术进行了系统的硬件设计,采用VC++进行了系统的软件设计,搭建了系统实验平台并且进行了实验和调试.结果表明:提高了系统控制的精度、速度和检测效率,可以实现对超声水浸探头和被检测物体的运动控制,具有连续扫查和定向扫描功能.
超声检测;运动控制;步进电机;实验平台;VC++
近些年超声波无损检测技术正在朝着自动化和智能化的方向发展,并取得了很大的进步.如今几乎所有的工业部门和领域都应用到了超声检测技术,很多研究成果已经达到了国际级的水平并且应用于实践生产中,充分显示出了其所独具的重要性和不可替代性[1].我国已经成立了全国性的无损检测学术组织——中国机械工程学会无损检测分会.目前我国在无损检测方面开展的研究主要包括:计算机化超声操作设备、可视化应用系统软件、超声机器人自动检测装置、自动扫描超声成像技术、超声数字信号处理、高频超声无损检测、多座标多通道超声自动扫描系统等[2].但是国内对各种工件的超声检测工作主要是利用手提式超声检测仪,依靠人工手动移动的方式来检测.这种检测方式存在着很多问题,比如检测效率低、易发生漏检和误检、对检测人员的要求也很高等,因此研制自动化超声检测系统就显得尤为重要[3-4].本文设计了基于VC++的超声检测运动控制系统,它能够有效地解决以前手提式超声检测仪所存在的问题,并且可以对大型零件进行自动检测和连续扫描,检测效率高,不会出现漏检和误检的问题.它不仅可以应用于一般工业生产中的大型零件的检测,而且在航天航空所用工件、铁路轨道、锅炉和焊件等方面的检测中均具有非常重要的应用价值[5-6].
1 系统设计方案
基于VC++的超声检测运动控制系统主要由工控机、运动控制系统、超声检测系统和超声水浸探头等部分组成,如图1所示.其中,运动控制系统是由运动控制器、步进电机驱动器、步进电机和机械执行装置等组成;超声检测系统是由超声波发送与接收电路、超声信号采集电路、超声信号处理和传输电路等组成.
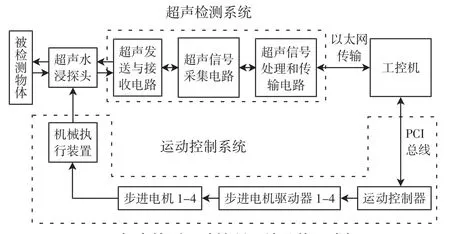
图1 超声检测运动控制系统总体组成框图Fig.1 Block diagram of ultrasonic testing movement control system
超声检测运动控制系统的整体工作原理是,首先由工控机发送指令,再通过以太网将检测信号传送到超声检测系统,超声检测系统收到该信号之后由超声发送与接收电路产生激励信号并发送给超声水浸探头,超声水浸探头向被测工件发送超声检测信号;然后,该超声检测信号经被测工件之后反射,超声水浸探头接收其回波信号后送给超声发送与接收电路放大,经超声信号采集电路之后转换成数字信号;最后,通过超声信号处理和传输电路处理之后再通过以太网传回到工控机.
运动控制系统的工作原理是,工控机通过PCI总线与运动控制器进行通信连接,通过运动控制器向步进电机驱动器发送运动控制信号,驱动步进电机运动,利用机械执行装置带动超声水浸探头运动,实现对被测工件的扫描检测.步进电机的运动通过运动控制器来控制.由于运动控制器可以输出高频率脉冲串,其中通过脉冲频率来控制电机的运行速度,通过发出的脉冲个数来控制电机的转角,通过发出的脉冲频率变化率来控制电机的加速度,从而实现对电机进行加/减速、插补驱动、位置移动等运动控制[6].在步进电机驱动器接收到运动控制器的信号之后,会向步进电机发送控制信号和驱动信号,驱动步进电机转动并控制电机的运动方向、转角、速度和加减速[7].通过步进电机的转动来带动机械执行装置移动,机械执行装置连接的水浸探头也随之移动,最终完成对被测工件的扫描检测.
在系统运动控制部分中设计了四轴运动的控制系统,分别为X、Y、Z、α轴,每个轴均由步进电机和相对应的驱动器控制[8-9],选取了步进电机1-4及其对应的步进电机驱动器1-4.其中,步进电机1控制探头实现在X轴方向的扫描;步进电机2控制探头实现在Y轴方向的扫描;步进电机3控制探头实现在Z轴方向的扫描,通过X、Y、Z 3个轴进行三维立体空间扫描;步进电机4连接的是α轴,α轴是一个放有圆柱形水槽的转台,通过对电机正转、反转的控制来实现转台在α轴上顺时针、逆时针的转动,从而可以使探头保持不动,通过被测工件的转动来进行检测.该系统既可以进行单轴的直线定向扫描,又可以进行多轴的任意扫描和连续扫查.
为了使超声检测运动控制整体系统具有最佳的性能,不仅要设计好系统的硬件部分,还要编译好软件部分,最终实现该系统的结构化、系统化、自动化和模块化,并能支持用户进行二次开发[10].
针对工控机的软件设计,选择VC++语言进行编译控制,在Windows应用平台上操作,使用时可以选择连接模式、运动方式、设定参数、处理数据以及监控报警等操作,从而实现对整个操作系统的控制.通过VC++语言来编写超声检测运动控制系统的软件程序,可以实现对超声水浸探头和被测工件的运动控制[11].运动控制系统的软件部分如图2所示.
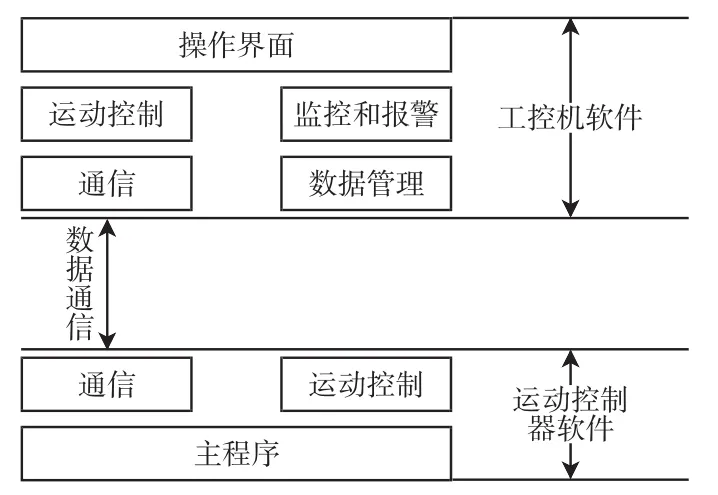
图2 系统软件结构图Fig.2 Structure diagram of system software
在整个超声检测运动控制系统中,运动控制系统部分是关注的重点.运动控制系统一方面通过工控机上的控制软件来控制超声水浸探头进行运动,进行自动检测.另一方面控制系统也能精确控制需要检测的具体位置,实时地将探头的位置信息同布上传到工控机上,使这些位置信息与数据采集器所采集到的超声数字信号在位置坐标上建立出映射关系,实现一一对应[14].最后通过工控机上的图像处理软件,形成最终的超声检测图像,精确显示出被测工件存在缺陷的位置、大小和性质.
2 系统实验与调试
在完成了超声检测运动控制系统的硬件和软件设计部分后,搭建了该系统的实验平台,并且开始对整个系统进行实验和调试.在实际操作的过程中,发现了很多最初设计时没有考虑到的问题.根据实际调试中出现的问题,在实验中不断进行修改、完善,使整个系统最后能够达到预期的设计标准和要求.
2.1 实验平台的搭建
超声检测运动控制系统的硬件部分包括运动控制器、步进电机驱动器、步进电机和机械执行装置等,其中由机械执行装置来固定超声水浸探头进行扫描运动.将超声波C扫描检测系统平台作为机械执行机构,它由底板、水槽、探头架和X、Y、Z、α四轴定位平台等够成,其结构剖面图如图3所示.
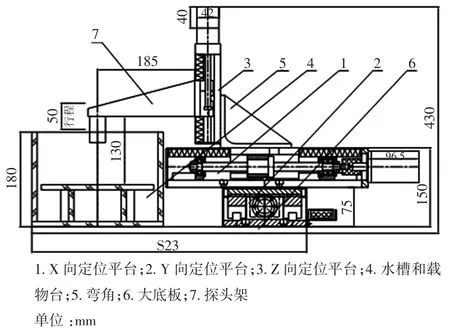
图3 机械执行装置剖面图Fig.3 Profile of mechanical perform device
该机械执行装置是针对脉冲反射超声检测方法而设计的,采用单探头进行检测.超声探头放置在探头架中.探头选用超声波水浸聚焦型探头,需使用水或者机油作为超声检测的耦合剂.操作时首先将被检测工件放入水槽内,之后将耦合剂倒进水槽,使被测物体完全浸没于耦合剂中,这样即可采用水浸探头对被测物体进行超声检测.X、Y、Z、α四轴检测系统可以在三维空间X、Y、Z轴方向上控制探头的运动,其中在X、Y轴方向上分别进行水平面上的左右和前后方向的直线运动,通过采用滚珠丝杠传动方式,控制超声水浸探头进行单轴直线运动或多轴连续扫查;在Z轴方向上进行垂直面上的上下方向的直线运动,通过采用滑动丝杠传动方式,控制超声水浸探头进出耦合剂及调整探头与被测物体之间的距离.丝杠传动能够把电机的旋转运动转变成为执行机构的直线运动,它具有转动速度快、转换效率高、同步性能好、耐用时间长、定位精度高等优点.α轴为水平旋转轴,可以沿着顺时针或逆时针方向转动.当超声水浸探头固定不动的时候,也可以通过被测物体的移动进行检测.该系统与其他检测系统相比增加了系统的灵活性和多样性.
步进电机的驱动器为双极性步进电机驱动器,采用12~42 V直流电源进行供电,共包含16种细分选择,通过拨码开关来选择相电流的输入值,最大值为3.5 A.步进电机驱动器具有过压、欠压、过流保护、相电流、LED报错和光藕输出报错等功能,并在静止时自动实现电流减半,其输入、输出控制信号均采用光电隔离[12].图4所示为步进电机驱动器的结构图.
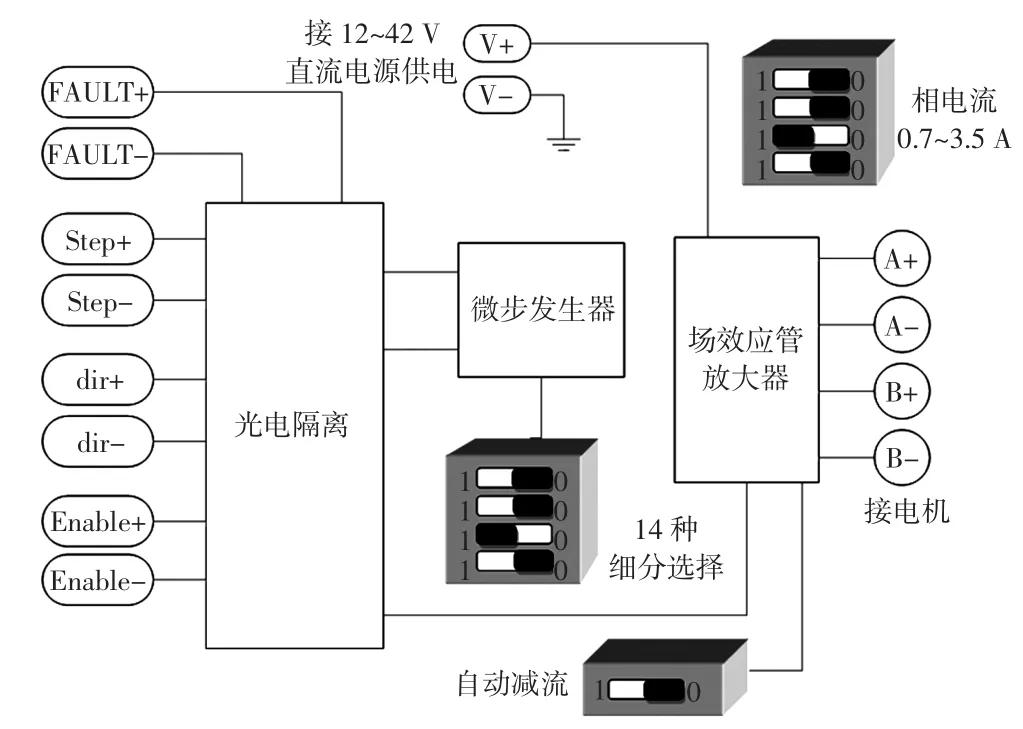
图4 步进电机驱动器结构图Fig.4 Structure diagram of stepping motor driver
2.2 实验及调试
在实验的过程中需要对软件部分进行调试,图5为工控机的MFCMove控制界面.在单轴运动控制显示界面中,运动轴可以自由选择AXIS0-AXIS4,将需要运行到的位置步数输入“单轴运动控制”中,之后点击“单轴运动到->”按钮实现运动.当系统运行时“状态信息”栏的运动状态会显示为“In Motion”,“Current Position”显示运动轴目前的位置坐标.
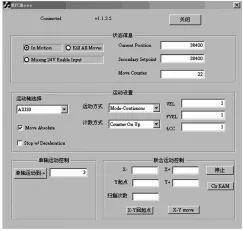
图5 单轴运动控制界面显示图Fig.5 Interface diagram of uniaxial motion control
如果在运行过程中出现系统故障或者单轴设定时超出了限定范围,电机轴会在运行到限位处时触发限位开关,系统会立即停止并暂停步进电机的工作[13].此时“状态信息”框中的运动状态显示为“Kill All Moves”,如想让系统重新运行需点击“联合运动控制”框中的“Clr KAM”按钮,对系统之前存储的指令和数据清零,使系统重新启动.
系统进行连续扫查运动时的操作界面如图6所示.本设计以X-Y平面扫查为实验,进行在X轴上往复运动、在Y轴上逐次步进的“Z字型”扫描方式.在扫描之前可以先点击“X-Y回起点”键使超声水浸探头回至原始起点方便扫描.扫描时首先在“联合运动控制”框中输入X+和X-的数值,规定在X轴上的运动范围;然后输入Y起点和Y+的数值确定Y轴的起点和Y轴每次步进的数值,之后输入扫描次数的数值;最后点击“X-Y move”按钮实现连续扫查.
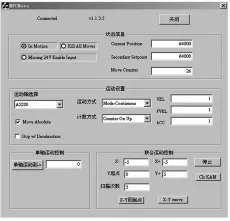
图6 扫查运动控制界面Fig.6 Interface diagram of scanning motion control
由实验结果得知,超声检测运动控制系统的定位精度为±0.065 mm/300 mm,重复精度为±0.05 mm,分辨率为0.01 mm.由此可见,本系统具有较高的可靠性和准确性.
3 结语
基于VC++的超声检测运动控制系统具有连续扫查和定向扫描的功能,它可以实现对超声水浸探头和被检测物体的运动控制,进而实现对各种工件的连续自动检测.该系统还便于形成B扫描或C扫描检测图像并进行自动探伤,避免了手动工作检测方式中的人为因素和客观环境的影响.自主研制超声检测运动控制系统可以提高我国产品的自主程度,减少对国外昂贵的超声检测仪器等产品的依赖,极大地降低了检测的成本,提高了产品的竞争力[19].与其他系统相比,该系统工作效率更高、应用前景更好,使用范围更广.
[1]张旭辉,马宏伟.超声无损检测技术的现状和发展趋势[J].机械制造,2002,40(455):24-26.
[2]陈文革,魏劲松.超声无损检测的应用研究与进展[J].无损探伤,2001,25(4):50-53.
[3]张伯鹏,汪劲松,郑力,等.先进制造技术基础研究现状及发展趋势[J].中国机械工程,1997,8(2):60-63.
[4]WALE J D,POLLOCK C.Hybrid stepping motors and drives[J]. Power Engineering Journal,2001,15(1):5-12.
[5]李国华,吴森.现代无损检测与评价[M].北京:化学工业业出版社,2009.
[6]赵俊伟,陈学文,史宇麟,等.大型锻件锻造工艺及缺陷控制技术的研究现状及发展趋势 [J].锻压装备与制造技术,2009,44(4):23-28.
[7]SAMBATH S,NAGARAJ P,SELVAKUMAR N,et al.Automatic detection of defects in ultrasonic testing using artificial neural network[J].International Journal of Microstructure and Materials Properties,2010,5(6):561-574.
[8]姜庆昌,郭士清,沈延飞.一种面向复杂曲面的水浸超声C扫描自动检测系统设计[J].机电工程技术,2009,38(3):29-32.
[9]BOURNE S.Novel solid contact ultrasonic couplants based on hydrophilicpolymers[M].Rome:Processof15thWCNDT,2000:406.
[10]孙凯,杨青,郭广平.喷水穿透超声C扫描自动检测系统的研制[J].无损探伤,2006,30(6):21-22.
[11]孟令刚,宋光德.四通道超声探伤卡的硬件设计[J].电子技术应用,2006(2):87-89.
[12]SALAZAR A,VERGARA L.ICA mixtures applied to ultrasonic nondestructive classification of archaeological caramics[J]. Eurasip Journal on Advances in Signal Processing,2010,10:217-230.
[13]乔日东,张维国,郭智敏,等.多轴超声C扫描系统在车辆负重轮检测中的应用[J].兵器材料科学与工程,2011,34(2):99-102.
[14]芮华,徐大专.一种新型数字化超声波自动探伤系统的研制[J].仪器仪表学报,2005,26(9):957-960.
[15]SHIVPRAKASH I,SUNIL K S,TITTMANN B R,et al.Ultrasonicsignalprocessingmethodsfordetectionofdefectsinconcrete pipes[J].Automation in Construction,2012(22):135-148. [16]姜平,王明渝,陈再秀.步进电机高分辨率自适应细分控制的研究[J].微电机,2011,44(4):57-59.
[17]邓志阳.基于FPGA的超声检测系统的研究[D].北京:北京化工大学,2010.
[18]吴金泉,邵秀琴,周汉湘,等.基于Visual C++的超声成像系统控制软件的设计[J].中南民族大学学报:自然科学版,2008,27(1):64-67.
[19]李凯,郭大勇,阙开良.一种新型超声C扫描检测系统[J].无损检测,2012,34(4):70-74.
Design and realization of motion control system for ultrasonic testing based on VC++
HAN Ming1,MIAO Chang-yun2,BAI Hua2
(1.School of Mechanical Engineering,Tianjin Polytechnic University,Tianjin 300387,China;2.School of Electronics and Information Engineering,Tianjin Polytechnic University,Tianjin 300387,China)
A motion control system for ultrasonic testing is designed based on VC++,which is composed of industrial machines,ultrasonic testing system,motion control system,immersion ultrasonic probe and other components. The hardware of the system is designed using ultrasonic nondestructive testing technology and motion control technology,and the software of the system using VC++.The laboratory terrace is constructed and are experiment and relaxation are conducted,the precision and speed of the motion control system are improved the detection efficiency is also increased.The system enables motion control of ultrasound probe and the detected object,with functions of continuous scanning and directional scanning.
ultrasonic testing;motion control;stepping motor;laboratory terrace;VC++
TP273;TB551
A
1671-024X(2015)05-0063-04
10.3969/j.issn.1671-024x.2015.05.013
2015-06-25
国家自然科学基金资助项目(51274150)
韩 明(1987—),男,博士研究生,主要研究方向为超声波检测、运动控制.E-mail:hanming.tjpu@163.com
