机器人与自动化技术
2015-03-15北京自动化系统成套工程公司前总工程师卞正岗
北京自动化系统成套工程公司前总工程师 卞正岗
机器人与自动化技术
北京自动化系统成套工程公司前总工程师 卞正岗
1 概况
机器人技术融合了机械、电子、计算机、材料、仿生学、自动化技术、通信技术等各种技术,它是机、电、仪一体化的产物,在协助和取代人从事生产和社会实践方面已经取得了可观的成绩。这种模仿人类和动物行为的机器,具有身体、大脑、动作三大特征,一般机器人应有如下五部分组成,即一套可移动的身体结构和肌肉系统或称类似于马达的装置,做到移动或完成某个动作,一套感官系统或称传感器系统,大脑系统或称计算机系统,能源系统或称电源。
机器人系统如图1所示,一般由执行器(机械手等)、控制器、环境、任务四部分组成。一般工业机器人的重要技术指标有自由度、动作形态、作业空间、承载能力、运动速度、位置精度等。
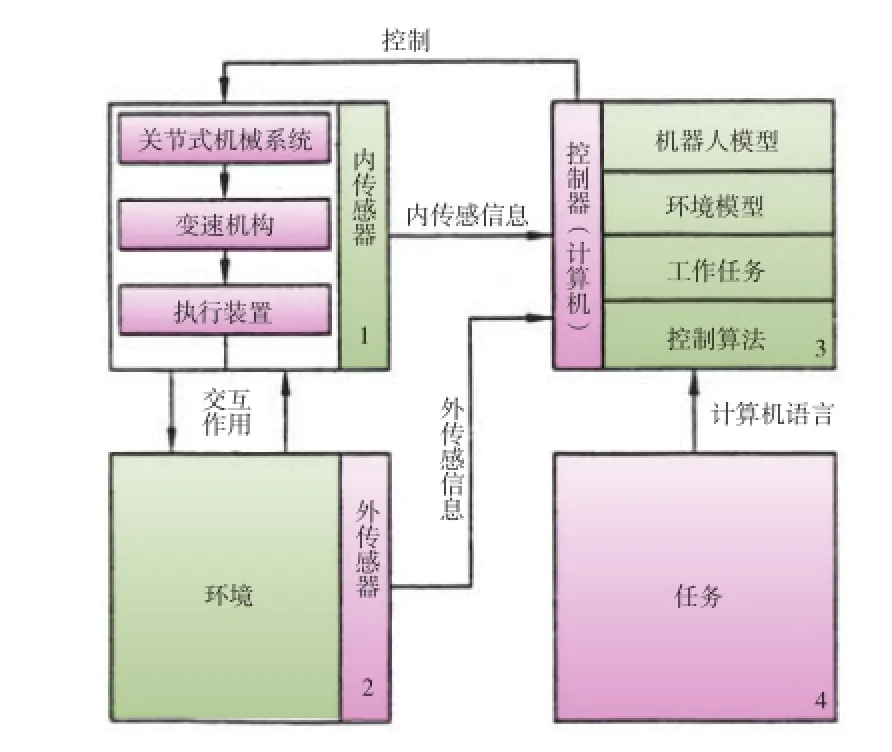
图1 机器人系统的基本结构图
国际上没有制定统一的机器人分类标准。一般分为工业机器人和服务机器人两大类。国内经常分为工业机器人和特种机器人(后者包括水下机器人等)两大类。也有因为技术进步和市场需求而形成的分类:一般机器人和移动机器人两类,一般机器人和拟人机器人两类,一般机器人和智能机器人两类等。智能机器人是一种具有感觉和识别能力,并能够控制自身行为的自动化机器,具体智能能力有感知能力、规划能力、动作能力和协同能力等。
目前大部分机器人为工业机器人,多用于抓取、搬运、分拣、上下料、包装、码垛、摆放、装配机焊接、喷涂、打磨、抛光、切割等方面,虽然它在机械加工的柔性制造系统或自动化生产线或其他行业的离散生产线中,不像数控机床或加工中心处于主工艺设备的地位,但它是不可或缺的。目前由于通用机器人能力的加强和性价比的提高,经常可在其末端接上适当的操作器或辅助设备,在控制器内写入易编程的程序或控制方案,就可以完成上述各种功能,所以原来细分的搬运机器人、码垛机器人、焊接机器人等分类,也在逐渐淡化。这一趋势,退一步说是诸发展趋势之一种,当然这是集成商或工程公司乐于促成的。
无论从机器人所采用的器件或控制方式等方面来分析,更新换代是大势所趋。从工业机器人动作形态上来看,选用关节型机器人(多关节机器人、电动机驱动的机器人)较多,并联型机器人的新产品也在增加。
本文在下两章将先讲控制系统,综述传感器,以上对自动化技术与机器人的关系作一下交代。
2 控制系统
这里所指控制系统是指如图1的全部,或者说是指控制器和执行器,或者说包括了机器人本体执行器(机械手等)内的伺服系统和置于本体内、外的控制器相关各部分。或者说控制系统包括了除去机械部件外的各种电气部件的硬件和软件。
2.1交流伺服系统
机械手等实现了人的胳膊和手的功能,手臂决定了机器人所能达到的位置(position),而手腕则决定了机器人的姿态(pose),所以一个机器人(机械手)最起码具有6个自由度(3个位置自由度、3个姿态自由度)才能正常工作,也就是说起码要有6个交流伺服电动机驱动,才能完成手臂和手腕的运动控制。
由于伺服电动机的转速很高,必然经过减速器(谐波减速器与RV减速器)才与机械结构相联,故经常把伺服电动机与减速器组合成伺服机构。由于交流永磁电动机的大量使用,才推动了机器人产业的大发展。我国乃永磁体原料稀土金属的生产大国,我想众多的电机专业人士,定会在这方面有所作为。
目前的交流伺服系统俗称三环系统,即位置环——速度环——电流环三环闭环系统,三环均为PI比例积分调节,即实现无差调节。如图2所示。
关于永磁电动机,现在主要形势为直流无刷电动机和交流同步电动机,详见国防工业出版社2013年1月出版的由孙汉卿、吴海波编著的《多关节机器人原理与维修》一书的P94~P141。
电动机电流与转矩的关系为M=CMΦI,其中Φ是电动机中的磁场,是个常量,CM是电动机的转矩常数,所以电动机电枢电流I与电动机的电动转矩M成正比。这个反馈能保证停车的可控性。

图2 交流伺服系统框图
2.2控制器
目前控制器一般是一台工控机IPC,主CPU为32位中央处理机,一般机器人就地部分有内置PLC,而IPC是外置的一个箱体或工作台,这样看就和我们一般工业控制的PLC系统很相似了,实际是各公司产品各不相同,近十多年以来已经由各厂家专用的控制箱内专用的印刷电路板(如motoman公司的CPV、伺服接口、伺服单元)外接电动机与编码器位置传感器过渡为上述情况。当然,近十年以来,由于总线数据通信技术和软件平台技术的发展,又有较大变化,如嵌入式PC、PAC、CAN、ETHERCAT等逐渐使用。
软件功能以安川XRC功能表为例可分4类:编程盒操作软件、安全软件、维护功能软件、编程功能软件。关于编程软件,安川XRC为示教再现编程,通过仿真机离线编程和一些指令系统,而现在更推崇的是可径向机器人与其它离散控制、运动控制接轨的标准化的IEC61131-3和其《运动控制功能块》等。
从控制层次来说,以上伺服系统级或称一般自动化级,再向上是依靠动态模型、几何模型的控制模式级和依靠策略模型的人工智能级。
2.3机器人高级控制
机器人是控制理论应用的一个好典范,因为它有这个需求,经典反馈控制和现代控制在应用中遇到不少难题,或者说高级控制在机器人领域有用武之地。这里指的是比较先进的机器人中用到变结构控制、自适应控制和智能控制。
变结构控制是非线性控制中简单有效的一种方法,具体有滑膜变结构控制、轨迹跟踪滑膜变结构控制等。
自适应控制具体分二类:即模型参数自适应控制、自校正自适应控制、线性摄动自适应控制。
以上可属于现代控制技术的一部分,而智能控制是比较近期才形成的,主要是指递阶控制、模糊控制、神经控制、专家控制、学习控制、进化控制等,目前为止智能控制可以理解是在人工智能和自动控制交接领域成长起来的新学科。实际在机器人领域有实际应用的有如下几种:机器人自适应模糊控制、多指灵巧手的神经控制等。
另外还有机器人高层规划、机器人轨迹规划等学科,也是发展很快的。
关于智能控制,建议参阅1999年1月《中国工程科学》刊出的《智能控制——超越世纪的目标》宋健所注的论文。
3 机器人传感器
我们称一般安装在机器人如机械手上的传感器为内传感器(Inter sensons),称作为环境一部分的传感器为外传感器(External sensons)。
3.1内传感器
机器人是机电仪一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(arm)、手腕(wrist)等安装在一起完成位置、速度、力的测量,实现伺服控制。
(1)位置(位移)传感器
直线移动传感器有电位计式传感器和可调变压器两种,角位移传感器有电位计式、可调变压器、旋转变压器及光电编码器三种,其中光电编码器有增量式编码器和绝对式编码器。增量式编码器一般用于零位不确定的位置伺服控制,绝对是编码器能够得到对应于编码器初始锁定位置的驱动轴瞬时角度值,当设备受到压力时,只要读出每个关节编码器的读数,就能够对伺服控制的给定值进行调整,以防止机器人启动时产生过剧烈的运动,还有光栅尺、感应同步尺、磁栅尺及其它变形产品。
(2)速度和加速度传感器
速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。利用位移的导数,特别是光电方法让光照射旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转角度,及利用圆盘制成有缝隙,通过二个光电二极管辨别出角速度,即转速,这就是光电脉冲式转速传感器。
此外还有测速发电机用于测试等。
应变仪即伸缩测量仪,也是一种应力传感器,用于加速度测量。
加速度传感器用于测量工业机器人的动态控制信号。一般有由速度测量进行推演、已知质量物体加速度所产生的力,即应用应变仪测量的力进行推演,还有就是下面所说的方法:
与被测加速度有关的力可由一个已知质量产生。这种力可以为电磁力或电动力,最终简化为对电流的测量,这就是伺服返回传感器,实际又有多种振动式加速度传感器。
(3)力觉传感器
力觉传感器用于测量两物体之间作用力的三个分量和力矩的三个分量。机器人中理想的传感器是粘接在依从部件的半导体应立计。具体有金属电阻型力觉传感器、半导体型力觉传感器、其它磁性、压电式和利用弦振动原理制作的力觉传感器。
还有转矩传感器(如用光电传感器测量转矩)、腕力传感器(如国际斯坦福研究所的由6个小型差动变压器组成,能测量作用于腕部X、Y和Z三个方向的力及各轴的转矩)等。
机器人发展历史较长,近年来普遍采用的交流永磁电动机为主的交流伺服系统,对应位置、速度等传感器大量应用的是:各种类型的光电编码器、磁编码器和旋转变压器。
3.2外传感器
以往一般工业机器人是没有外部感觉能力的,而新一代机器人,如多关节机器人,特别是移动机器人、智能机器人,则要求具有自校正能力和反应环境变化的能力,外传感器就是用于实现这些能力。
(1)触觉传感器
微型开关是接触传感器中最常用的型式,另有隔离式双态接触传感器(即双稳态开关半导体电路)、单模拟量传感器、矩阵传感器(压电元件的矩阵传感器、人工皮肤——变电导聚合物、光反射触觉传感器等)。
(2)应力传感器
如多关节机器人进行动作时需要知道实际存在的接触、接触点的位置(定位)、接触的特性即估计受到的力(表征)这三个条件,所以用上一章节已指出的应变仪,结合具体应力检测的基本假设,如求出工作台面与物体间的作用力,具体有对环境装设传感器、对机器人腕部装设测试仪器、用传动装置作为传感器等方法。
(3)接近度传感器
由于机器人的运动速度提高及对物体装卸可能引起损坏等原因,需要知道物体在机器人工作场地内存在位置的先验信息以及适当的轨迹规划,所以有必要应用测量接近度的遥感方法。接近度使传感器分为无源传感器和有源传感器,所以除自然信号源外,还可能需要人工信号的发送器和接收器。
超声波接近度传感器用于检测物体的存在和测量距离。它不能用于测量小于30~50cm的距离,而测距范围较大,它可用在移动机器人上,也可用于大型机器人的夹手上。还可做成超声导航系统。红外线接近度传感器,其体积很小,只有几立方厘米大,因此可以安装在机器人夹手上。
(4)声觉传感器
用于感受和解释在气体(非接触感受)、液体或固体(接触感受)中的声波。声波传感器复杂程度可以从简单的声波存在检测到复杂的声波效率分析,直到对连续自然语言中单独语音和词汇的辨识。
(5)接触式或非接触式温度传感器
近年在机器人中应用较广,除常用的热电阻(热敏电阻)、热电偶等外,在热电电视摄像机测量感觉温度图像方面也取得进展。
(6)滑觉传感器
用于检测物体的滑动。当要求机器人抓住特性未知的物体时,必须确定最适当的握力值,所以要求检测出握力不够时所产生的物体滑动信号。
目前有利用光学系统的滑觉传感器和利用晶体接收器的滑觉传感器,后者的检测灵敏度与滑动方向无关。
(7)距离传感器
用于智能移动机器人的距离传感器有激光测距仪(兼可测角)、声纳传感器等,近几年距离传感器发展很快。
(8)视觉传感器
视觉传感器发展很快,它与工业自动化仪表类的“机器视觉”传感器——如多种工业相机或工业摄像机及相应的处理软件,还有各种数据通信的接口等,是相通的。机器人视觉(图像识别、图像理解)已成了一门专门学科。
纵观机器人发展历史,横观众多行业传感器的发展历史,特别是分析近年导航技术的发展、在线分析仪表技术的发展和多传感器融合技术的发展,可以看出机器人传感器将会有更大的发展空间。
卞正岗(1936-),男,教授级高级工程师,1961 年毕业于清华大学电机系,早年从事电机及微型电机研究,后多年从事工业自动化仪表、集散系统和现场总线的研制和自动化系统集成的工程实践,享受政府特殊津贴,中国自动化学会科普工作委员会委员,曾获得有色总公司科技进步一等奖和国家机械总局科技进步三等奖。
