参考地物的飞航导弹INS误差估计及补偿方法*
2015-03-14范绍里陆巍巍
范绍里 王 磊,2 陆巍巍
(1.海军航空工程学院 烟台 264001)(2.91515部队 三亚 572016)
参考地物的飞航导弹INS误差估计及补偿方法*
范绍里1王 磊1,2陆巍巍1
(1.海军航空工程学院 烟台 264001)(2.91515部队 三亚 572016)
针对飞航导弹惯导系统(INS)单独使用时存在位置和速度估计误差发散的问题,从便于工程实现的角度,提出了一种基于对航路上已知地标连续、被动观测的INS误差估计及补偿方法。该误差估计方法以INS误差作为状态量,以导弹相对于地标的观测序列与INS估计信息解算的伪观测序列构造观测量,通过迭代求解,分两个阶段分别估计出INS水平通道和垂直通道误差,并利用平均去噪的思想提高了估计精度。该误差补偿方法考虑了误差估计耗时对补偿精度的影响,采用实时补偿的方式降低了精度损失。仿真结果表明:误差补偿后,飞航导弹INS位置估计精度收敛到3m之内,速度估计精度收敛到0.5m/s之内,验证了论文方法的有效性。
视觉导航; INS误差估计; 迭代法; 飞航导弹; 观测序列; 平均去噪
Class Number E927
1 引言
在飞航导弹导航领域,惯性导航是拥有绝对统治地位的导航方式。但单独使用INS(Inertial Navigation System)长时间工作时,往往不能满足导航精度要求,有必要对弹上INS解算的地理坐标进行修正。
GPS/INS组合导航是对INS漂移误差的一种有效补偿方法,但战争时期GPS等卫星导航信息将可能不可用[1]。弹载前视装置(例如TV和红外成像)是实现精确末制导所必须的,在中制导阶段,它也可被用于对导弹的INS误差进行修正[2]。
国内外很多学者在飞行器视觉辅助导航方面进行了研究,取得了许多有用的成果[3~13]。与一般飞行器不同,飞航导弹视觉辅助导航有如下特点:飞航导弹在中制导阶段是沿着规划的航路飞行的,视觉导航不能改变其巡航路径;视觉导航环境具有大规模、非结构化、稀疏特征的特点,单次视觉导航过程中,飞行航路附近一般仅有一个已知固定地面目标(简称地标)可供参考;仅支持单目视觉,且视场范围有限。这样,上述文献中所提到的方法难以推广应用于飞航导弹的导航与定位。
针对导弹视觉辅助导航与定位的文献比较少见。文献[14]研究了使用导引头跟踪地物修正惯导,利用扩展卡尔曼滤波对视线角速率和导弹的高度、速度信息进行信息融合,实现了地空导弹的惯导水平位置误差修正,但误差估计精度仅为80m,且高度和速度滤波结果不能收敛。文献[15]在假定INS速度估计精确的前提下,提出了基于视线角、视线角速率及高度量测的UKF滤波INS位置误差修正方法。而实际上INS速度估计是存在常值误差的。文献[16~17]研究了基于成像帧频计算无人机的瞬时飞行速度。针对导弹进行视觉辅助速度估计的文献未见报道。
针对上述问题,结合中制导段飞航导弹视觉辅助导航的特点,本文从易于工程实现的角度,提出了一种视觉辅助INS误差估计和补偿方法:仅依托弹载前视装置对航路上单个已知地标的连续、被动观测,实现INS位置和速度误差的估计,并进行误差实时补偿。仿真分析表明,该方法能有效解决飞航导弹INS单独使用时位置和速度估计误差发散的问题。
2 导航数学模型
导弹相对于地标的可观测距离有限,且受导引头视场的限制可观测时间也很短,因此,地球自转和地球曲率对研究结果影响很小,故可以在局部范围内假设大地为平面。导弹与地标间的相对关系如图1所示。
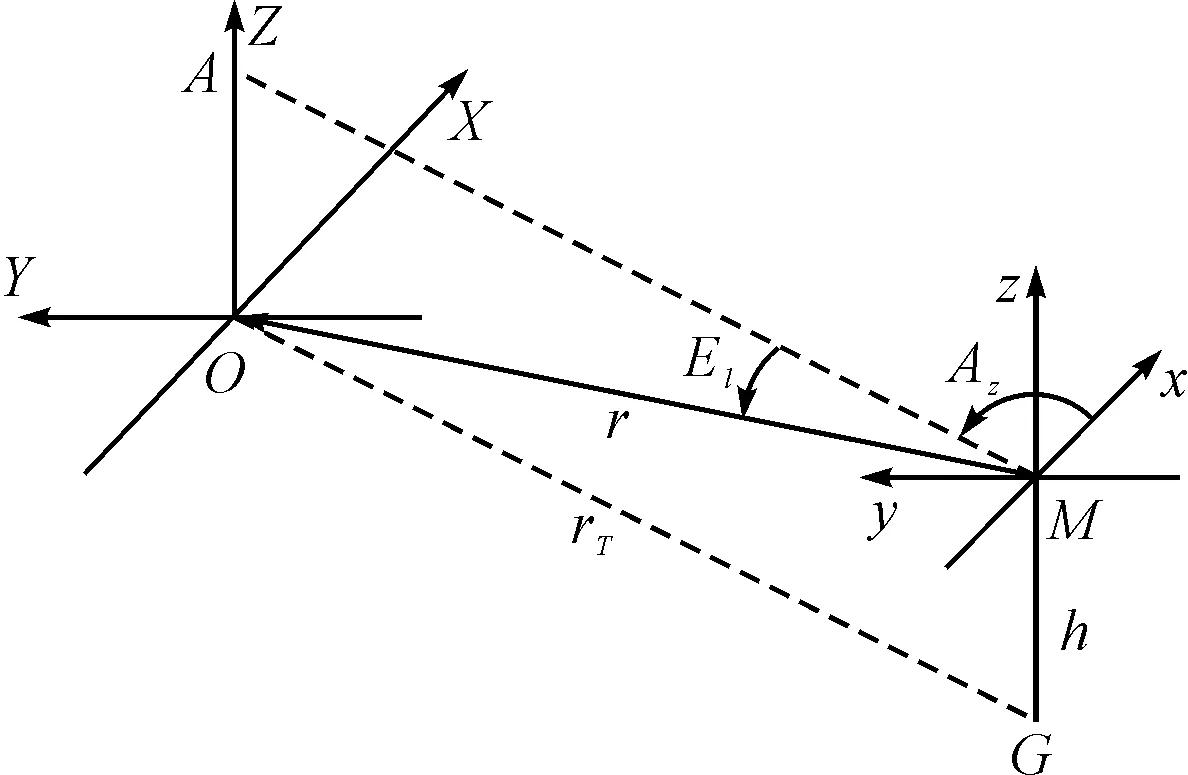
图1 导弹与地标相对关系

Az=arctan(y/x)
(1)
(2)
实际应用时需要具体考虑视线角所在象限。

(3)
(4)

3 INS误差估计及补偿方法
3.1 量测信息及处理
飞航导弹在中制导段飞行过程中,利用其前视装置对进入视场的地标进行连续、被动观测,观测过程中任意采样时刻ti(i=1,2,…,n),都能够获得导弹相对于被测地标的一组观测信息:
(5)
另一方面,由于惯导在铅垂方向加速度计的积分是发散的,飞航导弹采用INS和气压高度表组合导航,ti时刻导弹能够估计得到其状态信息
(6)


(7)
这样,就得到了可以用于飞航导弹INS误差修正的量测信息,如图2所示,并将其实时存储于弹载计算机。
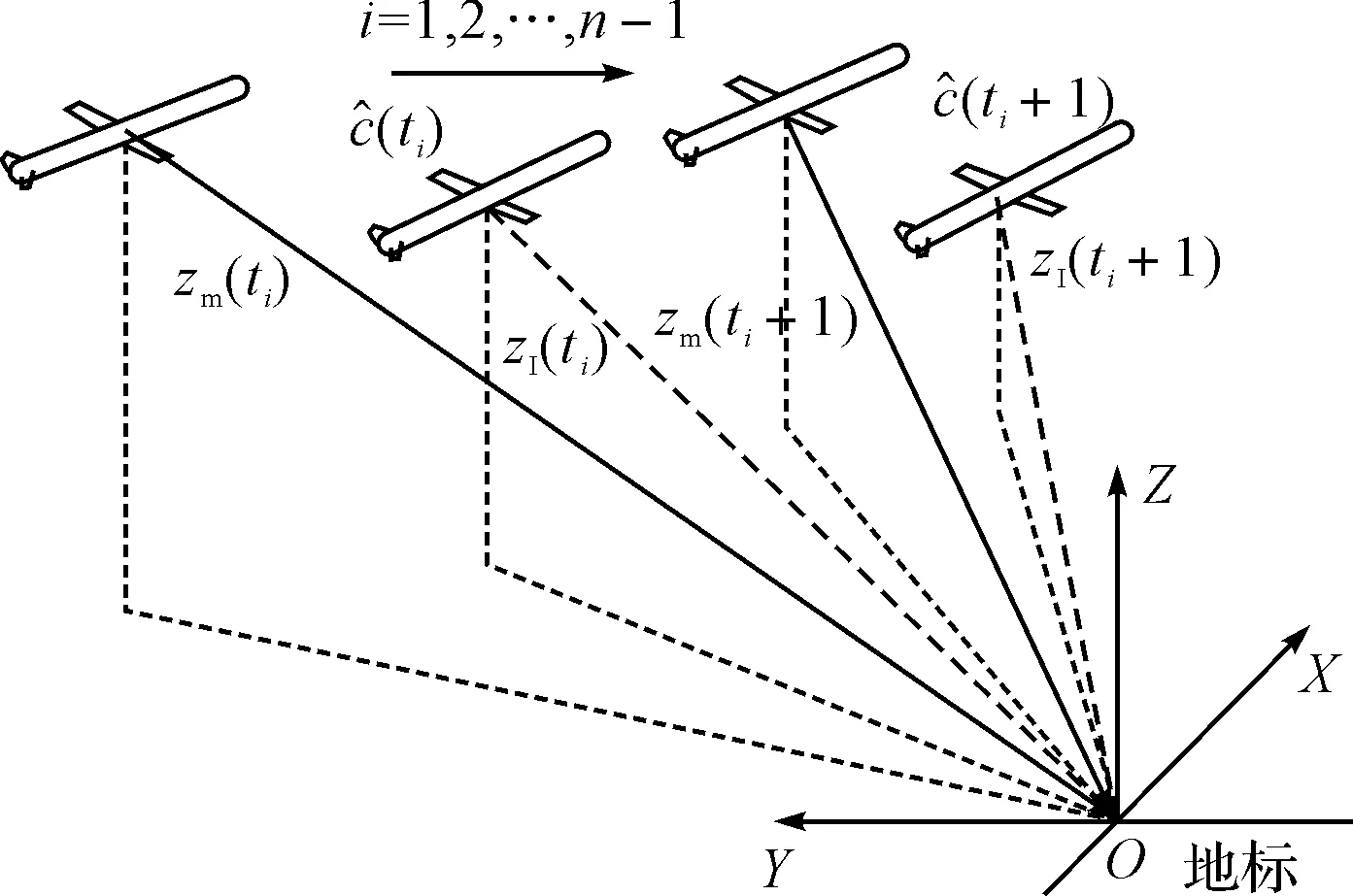
图2 量测信息示意图
观测结束后,利用INS估计信息构造的伪观测序列ZI(ti)与前视装置获得的实际观测序列Zm(ti)构造残差,以残差作为观测量,INS误差作为状态量,建立量测方程。
tanAzI≈tanAz+a11δx+a12δy
(8a)
tanElI≈tanEl+a21δx+a22δy+a23δz
(8b)
(8c)
(8d)
又前视装置观测信息可以表示为
tanAzm≈tanAz+w1
(9a)
tanElm≈tanEl+w2
(9b)
(9c)
(9d)
式中,w1、w2、w3、w4分别为方位角、高度角、方位角速率和高度角速率量测噪声。
将式(8)与式(9)相减,可得INS误差估计量测方程:

(10)


由于INS误差量有六个,而导弹相对于被测地标的可观测量只有四个,因此,式(10)无法全部估计出导弹的INS误差量。考虑到INS垂直通道的估计是由气压高度表辅助实现的,尽管气压高度表受气压和温度变化的影响存在常值量测误差,但其估计精度较水平通道单独依靠INS的估计精度要好很多。因此,可以暂不考虑垂直通道的估计误差,估计出导弹INS水平通道误差;在此基础上,对INS水平通道数据进行更新,忽略水平通道的估计误差,再进行垂直通道误差估计。
3.2 水平通道误差估计
(11)
式中,X1(ti)=[δx(ti),δy(ti),δve(ti),δvn(ti)]T;

ti时刻,式(11)中的四个观测分量方程是相互独立的,因此H1(ti)可逆,于是可得:
(12)
这样,就可以估计出ti时刻飞航导弹INS东、北向位置及速度误差。但是,由于量测噪声W1(ti)的影响,使得误差估计精度不高,不能满足飞航导弹INS误差补偿的精度要求。
考虑到受前视装置视场的限制,导弹对地标的可观测时间很短,所以可以合理化地认为INS速度误差在观测过程中保持不变,即
δve(ti)≈δve,δvn(ti)≈δvn,δvu(ti)≈δvu
(13)
于是,由ti与tn时刻导弹的相对位置关系,可以得到如下约束方程:
δx(tn)≈δx(ti)+δve·(n-i)T
(14a)
δy(tn)≈δy(ti)+δvn·(n-i)T
(14b)
将式(14)代入式(11),可以将观测过程中任意采样时刻ti的量测方程都表示成以tn时刻INS水平通道误差为状态量的形式
(15)
式中,X1(tn)=[δx(tn),δy(tn),δve,δvn]T,

这样,就可以利用平均去噪的思想,将n次观测得到的量测方程求和处理:
(16)
由式(16)可得:
(17)
又量测噪声可以认为是高斯白噪声,即
(18)
于是可得:
(19)

(20a)
(20b)
(20c)
(20d)
其中,“-”表示更新前,后文不再赘述。
3.3 垂直通道误差估计
令δx=δy=δve=δvn=0,代入式(10)可得垂直通道误差估计的量测方程:
(21)

考虑到气压高度表量测误差随飞行高度近似线性变化,而飞航导弹中制导段多为平飞,且观测时间很短,可以认为观测过程中气压高度表量测误差近似不变,即
δz(ti)≈δz
(22)
于是可得,
X2(ti)=X2=[δz,δvu]T
(23)
将n次观测得到的量测方程求和处理可得
(24)
由式(18)和式(24)可得
(25)
于是,可得到新的高度和天向速度估计值:
(26a)
(26b)
这样,经过两阶段的误差估计,由式(19)和式(25)得到了tn时刻飞航导弹INS误差的估计量:
(27)
3.4 误差补偿

(28a)
(28b)

(29)
4 迭代算法

Step1:INS水平通道误差估计;
Step2:令δz=0,δvu=0,S(k)=0;

Step6:水平通道数据更新,即式(20);
Step9:垂直通道误差估计;
Step10:令δx=δy=δve=δvn=0;

Step14:水平通道数据更新,即式(26);
水平通道误差估计是垂直通道误差估计的基础,其估计精度将直接影响垂直通道误差估计的效果,且INS水平通道初始误差一般较大,因此,有必要对INS水平通道误差估计执行内环迭代。而考虑到INS垂直通道的估计是由气压高度表辅助实现的,初始误差较小,所以,收敛快,外环迭代足以满足精度要求。
5 仿真分析

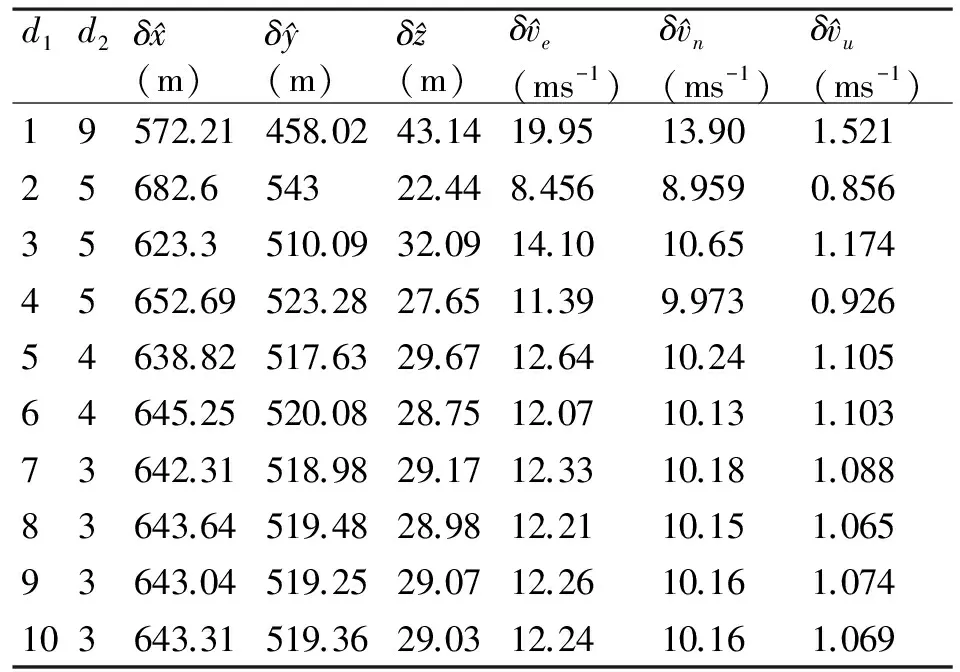
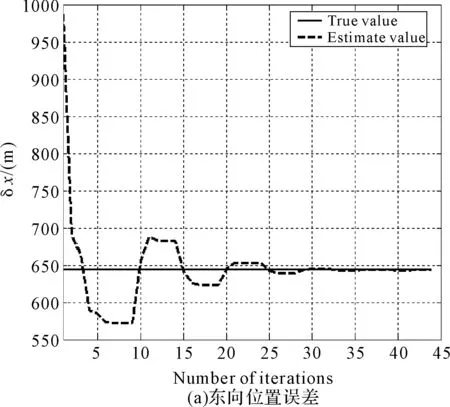
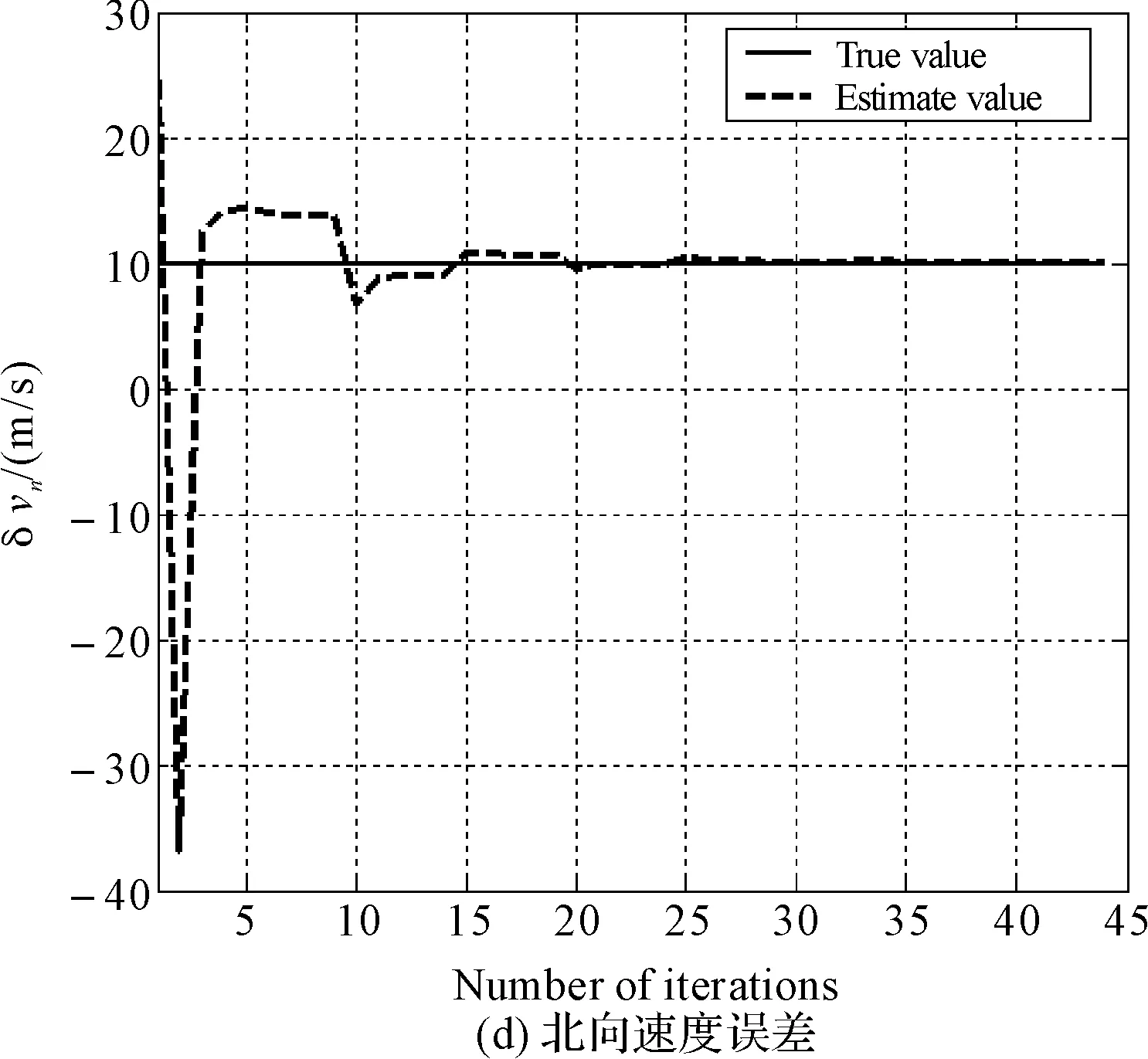
表1 tn时刻INS误差估计结果
由于存在速度误差,tn时刻飞航导弹东、北向位置估计误差真值已经分别从初始时刻的500m和400m发散到643.76m和519.80m,由图3可以看出,tn时刻INS误差量的估计值能够有效收敛到真实值,验证了方法的正确性。
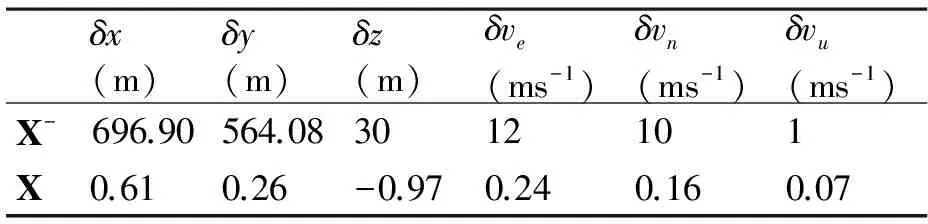
表2 误差补偿前后INS估计精度对比
从仿真结果可以看到,误差补偿后,飞航导弹INS位置估计精度收敛到1m之内,速度估计精度收敛到0.5m/s之内,验证了方法的有效性。
为了进一步验证本文方法的可用性,仿真研究在不同初始误差条件下误差补偿的效果。定义误差补偿后INS的位置估计误差精度因子σ1和速度估计误差精度因子σ2如下:
首先,其它条件不变,初始位置误差在δx∈(-700,700),δy∈(-700,700)(单位m)区间内变化,研究σ1、σ2随初始位置误差的变化规律,如图4(a)、(b)所示。
然后,其它条件不变,初始速度误差在δve∈(-15,15),δvn∈(-15,15)(单位m/s)区间内变化,研究σ1、σ2随初始速度误差的变化规律,如图4(c)、(d)所示。
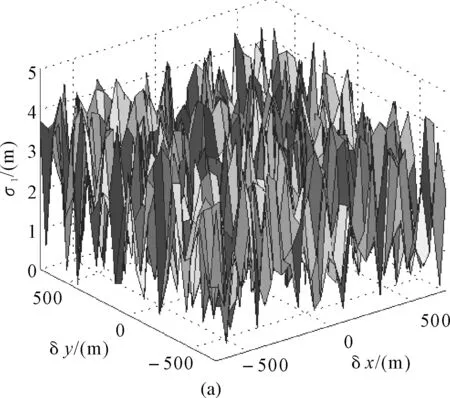
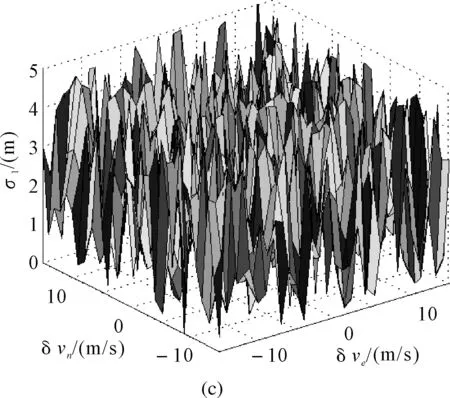
可以看出,σ1和σ2对于初始误差的变化表现出较强的鲁棒性。尽管初始误差不同,误差补偿后,飞航导弹INS估计精度都显著提高,位置估计精度达到3m,速度估计精度达到0.5m,充分说明了方法的工程应用可行性。
6 结语
本文以新型飞航导弹为应用背景,在GPS等卫星导航信息不可用的情况下,提出了基于地标被动观测的飞航导弹INS误差估计及补偿方法,该方法具有如下特点:
1) 以INS误差作为状态量,以导弹相对于地标的观测序列与INS估计信息解算的伪观测序列构造观测量,建立量测方程。
2) 将INS水平通道和垂直通道误差分两个阶段进行估计,采用迭代求解的方法,实现了三维位置和速度误差的有效估计。
3) 利用平均去噪的思想提高了误差估计精度。
4) 无需增加导弹硬件或要求导弹进行机动,符合飞航导弹中制导阶段的飞行特点,易于工程实现。
即使将来GPS等卫星导航信息可用,该方法仍然可以作为一种辅助导航手段,用于进一步增强组合导航系统的可靠性。
[1] Dr. Mikel, M. Miller. Navigation in GPS Denied Environments: Feature-Aided Inertial Systems[R]. Air Force Research Laboratory, RTO-EN-SET-116, 2010.
[2] Mosier Daniel, Sundareshan Malur K. A multiple model algorithm for passive ranging and air-to-air missile guidance[C]//Drummond Oliver E. Signal and Data Processing of Small Targets. San Diego, CA, USA: The International Society for Optical Engineering,2001:222-233.
[3] M. K. Kaiser. Vision-Based Estimation for Guidance, Navigtion and Control of an Aerial Vehicle[J]. IEEE Transactions on Aerospace and Electronic Systems,2010,46(3):1064-1077.
[4] Wu A D, Johnson E N, Proctor A A. Vision-Aided Inertial Navigation for Flight Control[J]. Journal of Aerospace Computing, Information and Communication,2005,2(9):348-360.
[5] 张志勇,张靖,朱大勇,等.一种基于视觉成像的快速收敛的位姿测量算法及实验研究[J].航空学报,2007,28(4):943-947.
[6] 徐超,范耀祖,沈晓蓉,等.一种无人机视觉导航方法及其滤波算法改进[J].北京航空航天大学学报,2010,36(8):1000-1004.
[7] Yoko Watanabe. Stochastically Optimized Monocular Vision Based Navigation and Guidance[D]. Georgia: PHD Thesis, Georgia Institute of Technology,2008.
[8] 王小刚,郭继峰,崔乃刚.基于数据链的智能导弹协同定位方法[J].中国惯性技术学报,2009,17(3):319-323.
[9] Hongliang Ren, Kazanzides, P. Investigation of Attitude Tracking Using an Integrated Inertial and Magnetic Navigation System for Hand-Held Surgical Instruments[J]. IEEE Transactions on Mechatronics,2012,17(2):210-217.
[10] Martinelli, A. Vision and IMU Data Fusion: Closed-Form Solutions for Attitude, Speed, Absolute Scale, and Bias Determination[J]. IEEE Transactions on Robotics,2012,28(1):44-60.
[11] Lupton, T, Sukkarieh, S. Visual-Inertial-Aided Navigation for High-Dynamic Motion in Built Environments Without Initial Conditions[J]. IEEE Transactions on Robotics,2012,28(1):61-76.
[12] Jun Zhang, Weisong Liu, Yirong Wu. Novel Technique for Vision-Based UAV Navigation[J]. IEEE Transactions on Aerospace and Electrionics Systems,2011,47(4):2731-2741.
[13] Jonathan Kelly, Gaurav S. Sukhatme. Visual-Inertial Sensor Fusion: Localization, Mapping and Sensor-to-Sensor Self-Calibration[J]. International Journal of Robotics Research,2011,30(1):56-79.
[14] 明宝印,尹健,高士英,等.利用成像导引头修正空地导弹惯导误差研究[J].弹箭与制导学报,2006,26(2):717-719.
[15] 卢晓东,董鹏,周军,等.飞航导弹地标被动观测自主导航修正技术[J].飞行力学,2009,27(6):83-86.
[16] Wang J L, Garratt M, Lambert A, et al. Integration of GPS/INS/Vision sensors to navigate unmanned aerial vehicle[C]//International Archives of the of Photogrammetry, Remote Sensing and Spatial Information Sciences,2008:963-969.
[17] 于起峰,李强,雷志辉,等.基于序列图像的无人机自测速方法与试验[J].航空学报,2009,30(8):1503-1507.
INS Error Estimation and Compensation Method Based on Passive Observation to Feature Target for Cruise Missile
FAN Shaoli1WANG Lei1,2LU Weiwei1
(1. Naval Aeronautical Engineering Academy, Yantai 264001)(2. No. 91515 Troops of PLA, Sanya 572016)
In absence of the other navigation system, cruise missile INS error will be cumulated continuously with the increase of endurance. Therefore, this article proposes a novel practical INS error estimation and compensation method based on continuous observation to feature target. With the observation sequence and pseudo observation sequence, the residual error sequence is constructed. And the error estimation equation is established by treating the residual error sequence as the observation. Then the INS level channel error and vertical channel error are estimated respectively by iterative algorithm. Means de-noising approach is used to improve the estimation accuracy. The INS error compensation method is a real time method. The simulation result shows that this method can reduce the INS position error to 3m and velocity error to 0.5m. So it could be applied to cruise missile autonomous navigation. Even if other navigation systems are available, this method could also be used to increase the reliability of the integrated navigation system.
vision navigation, INS error estimation, iterative algorithm, cruise missile, observation sequence, means de-noising approach
2015年3月7日,
2015年4月27日
范绍里,男,副教授,研究方向:飞行器测试与控制。王磊,男,硕士研究生,工程师,研究方向:导航制导与控制。陆巍巍,男,助教,研究方向:装备综合保障。
E927
10.3969/j.issn.1672-9730.2015.09.012
