半潜式航行器运动特性研究*
2015-03-14易谷丰
易谷丰
(中船重工第七一〇研究所 宜昌 443000)
半潜式航行器运动特性研究*
易谷丰
(中船重工第七一〇研究所 宜昌 443000)
论文研究了半潜式航行器的运动特性,建立了半潜式航行器的运动学模型,并从深度控制和回转航行两个方面对半潜式航行器的运动特性进行半实物仿真。半实物仿真结果表明:前水平舵是影响深度控制的主要因素,并得出前水平舵舵角和深度的对应关系;回转航行研究了航行器的垂直舵角、航速和回转半径的关系,得出了在一定航速下,不同垂直舵角下的回转半径。此研究准确把握了半潜式航行器的运动规律,为半潜式航行器的设计以及精确控制提供了理论基础。
半潜式航行器; 运动学模型; 半实物仿真; 回转半径
Class Number E835
1 引言
半潜式航行器是一种主航行器在水下、桅杆伸出水面的新型航行器,有了桅杆的进排气功能,可采用常规柴油动力,其工作时间和机动范围大大增加;同时在桅杆顶部可以加装高速无线通信设备和定位设备天线,这样就可以满足航行器的精确定位和无线通信功能,能够实时可靠地传输大量数据。相比于传统的水下航行器[1],半潜式航行器属于一种在近水面定深航行的新型航行器,其工作状态类似于潜艇近水面的航行状态,主体在水下,一部分在水面,同时其作业方式又与潜艇和其他水下航行器有区别,可搭载拖体进行水下作业。
半潜式航行器在军事上可作为猎雷声呐的拖曳平台,可以接收主控端的作业计划及各种指令遥控航行或者按照设定的航线自主航行,并且能够通过无线通信将声呐探测数据及视频数据传输给主控端。作为一个在近水面具备自主航行能力的航行器,在远海进行反水雷作战时,具备探测水雷障碍、为舰船搜索荐用航道的能力,保证编队顺利执行对空、对海、对陆攻击以及反潜等任务[2]。半潜式航行器在民用上可以搭载海洋探测装备,进行石油矿产资源勘探、海底光缆铺设、地形测量、目标搜索、海洋环境监测等,相比于其他的深海探测载体而言,其模块化的设计理念,精确的定位方式和高速的无线通信设备,保证了信息传递的实时性和精确性,具备良好的发展前景。
这里结合半潜式航行器自身的结构特点,确定了其坐标系,建立了半潜式航行器的运动学模型,推导了其运动学方程,在此基础上对深度控制和回转航行进行了半实物仿真,并对其结果进行了分析和讨论。
2 坐标系及坐标变换
2.1 坐标系定义
为了研究半潜式航行器的运动特性,掌握其运动规律,首先必须确定相应的坐标系,半潜式航行器可以看成刚体在流体中受到外力作用的运动,本文在考虑半潜式航行器自身特点的前提下,结合刚体动力学和流体力学的一般习惯,建立了如图1所示两种三维空间坐标系:固定坐标系(E-ξηζ)和运动坐标系(O-xyz)[3]。
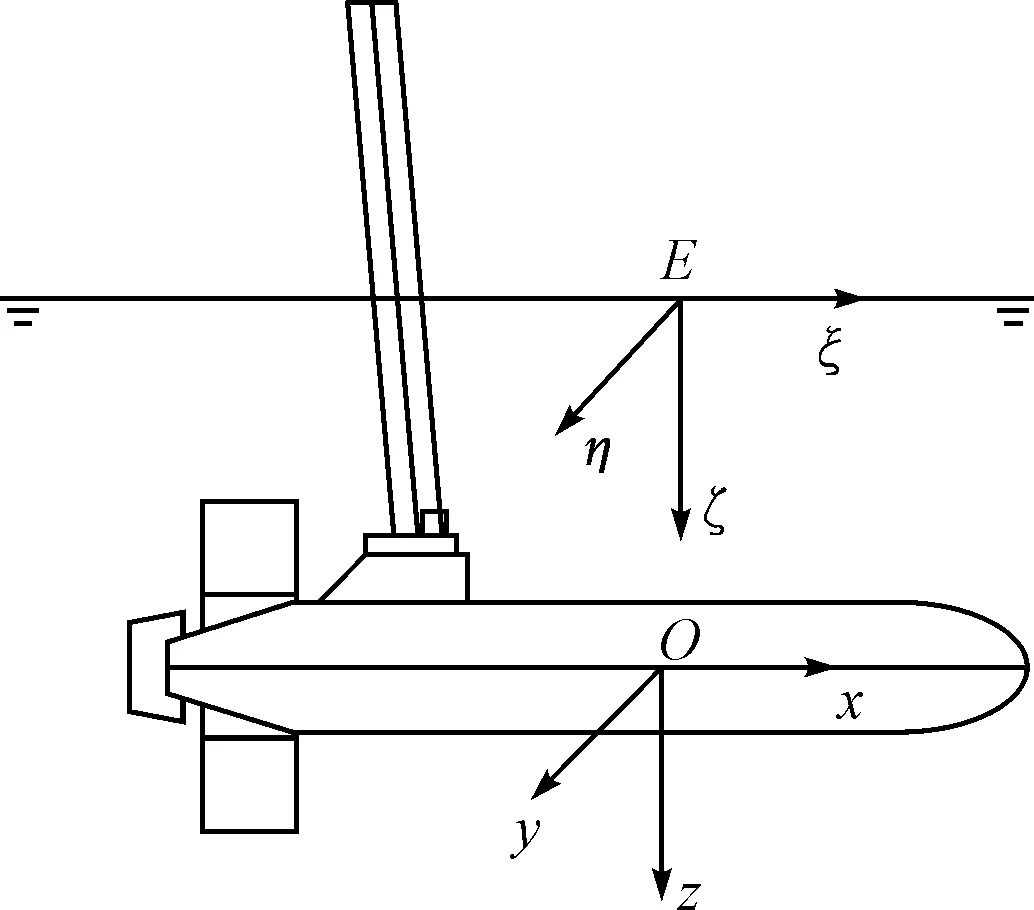
图1 半潜式航行器坐标系


表1 运动的自由度

表2 运动参数和力的动坐标分量
2.2 坐标变换
在讨论半潜式航行器空间运动方程[4~5]时,为了普遍适用性,把运动坐标系的原点取在半潜式航行器上任意一点,半潜式航行器的空间位置取决于动坐标系原点O在静坐标系中的三个分量ξ0、η0、ζ0以及动坐标系对于静态坐标系的三个姿态角φ、θ、ψ。
在本文的研究中,用列矩阵re=[XYZ]T表示地面坐标系中的矢量,r0=[xyz]T表示运动坐标系相应中的矢量,经过三次绕轴旋转的变换关系,可以得到地面坐标系与运动坐标系的关系为

(1)

(2)
(3)
将式(2)代入式(3)后得:
(4)


(5)
3 半潜式航行器运动学模型
3.1 半潜式航行器受力分析
要研究半潜式航行器的运动学模型[6],首先必须研究半潜式航行器所受到的力。半潜式航行器所受到的力(矩)可以分成水动力(即流体动力)和非流体动力(或静力)两大类[7~10]。水动力半潜式航行器在水中航行,水对半潜式航行器产生的反作用力;非流体动力则包括半潜式航行器所受的重力和浮力。因此半潜式航行器所受到的合力F可以表示为以下方程:
(6)

可以用下面方程描述半潜式航行器所受到的合外力矩:
(7)
式中:MF为水动力力矩;MB为浮力力矩;MP为重力力矩。
3.2 空间运动方程
运动坐标系的原点取半潜式航行器上任意一点且不计海流影响的情况下,本文中半潜式航行器的动力学方程可参考文献[11],半潜式航行器的运动方程可以用矩阵形式表示,其具体形式如式(8)所示:

(8)

M=MRB+MΛ
(9)
C(v)也由刚体科里奥利向心力矩阵CRB(v)和流体动力学附加质量的类科里奥利矩阵CA(v)两部分组成。
C(v)=CRB(v)+CA(v)
(10)
4 半实物仿真
4.1 仿真系统组成
半实物仿真系统主要仿真设备有:模拟水下航行姿态的三轴仿真转台、模拟航行深度的深度模拟器、实时解算航行器运动学与动力学模型的仿真计算机。参与仿真的部件有:中央控制系统(航行控制单元、安全控制单元及网络交换机)、深度传感器、航姿仪及导航定位设备、前水平舵机、后水平舵机(两个)、垂直舵机(两个),及相关网络接口交换机。其半实物仿真系统组成如图2所示。
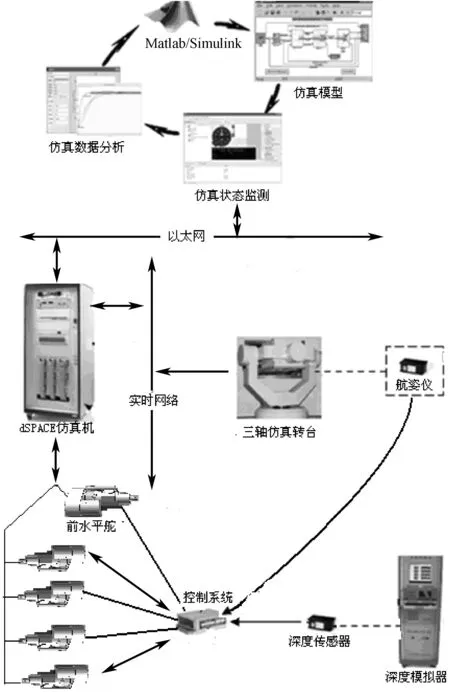
图2 半潜式航行器控制系统半实物仿真系统
整个半实物仿真系统包含控制系统和仿真系统两大部分,半实物仿真系统分为实时运行部分和非实时运行部分。非实时运行部分主要负责仿真模型的生成和下载,实时仿真的监控,试验数据的获取和保存,试验结果的统计分析等;系统实时运行部分负责生成航行器水下空间运动环境,驱动各种仿真物理效应设备。本方案采用分布式仿真架构,可以方便地进行接口扩展,并且能够在控制系统实物参试的状态下,对控制参数进行检验,为控制参数的优化设计提供依据和手段。
4.2 仿真硬件接口及仿真流程
半实物仿真系统的软硬件组成以及相应的接口关系如图3所示。

图3 半潜式航行器控制系统半实物仿真系统接口关系
1) 由同步信号触发仿真主机和中央控制系统进入仿真状态;
2) 仿真机根据初始设定参数实时解算航行器动力学与运动学模型,并将解算得到的航迹、空间运动姿态及当前深度,通过网络实时输给GPS模拟器、三轴仿真转台和深度模拟器,以模拟航行器航迹、空间运动姿态和航行深度;
3) 导航定位设备、深度传感器和安装于仿真转台上的航姿仪将感应到的航迹、姿态和深度信息反馈给中央控制系统(航行控制、安全控制单元);
4) 经综合处理后形成操舵和推进指令输出给舵机(前水平舵、后水平舵及垂直舵)和推进控制系统,通过A/D变换将舵机角位移的电信号反馈给仿真机,从而再实时解算下一帧航行器运动,形成周而复始的闭环动态仿真,直至收到仿真停止信号终止仿真。
半实物仿真又称为硬件在回路仿真,通过由上面介绍的半实物仿真工作过程可以看出,半实物仿真试验基本涵盖了半潜式航行器控制核心组部件,所以前期设计中难以量化的非线性因素,在这里就体现的比较全,再依据工程上成熟的参数正定法,经过半实物仿真可以获得具有很好鲁棒特性的控制律。
4.3 半实物仿真结果分析
通过半实物仿真试验可以得出,前水平舵角是影响深度控制的主要因素。航行器航行稳定,定深效果较好时的航速和前水平舵舵角关系为:6kn~8kn航速对应前水平舵舵角为-3°~-2°;8kn~12kn航速对应前水平舵舵角为-2°~-1°;12kn~15kn航速对应前水平舵舵角为-1°~0°。
回转航行半实物仿真试验重点研究了航行器的垂直舵角、航速和回转半径的关系。本试验是在不同的垂直舵角下,测试了不同航速下的回转半径,仿真试验得出三者之间的关系如表3所示。
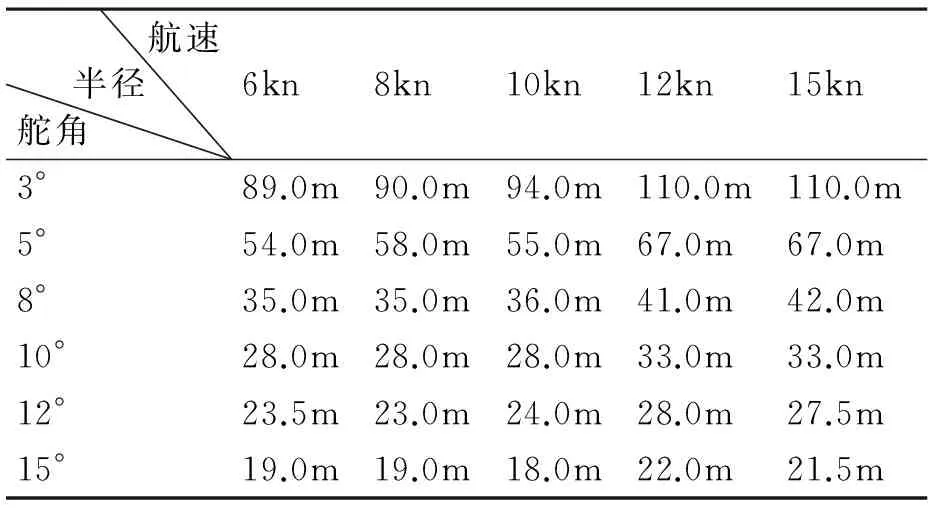
表3 垂直舵角、航速和回转半径之间的关系
由上表可知,在一定范围内,当垂直舵角一定时,回转半径随着航速的增加而增加;当航速一定时,回转半径随着垂直舵角的增加而减小。当航速到达15kn时,旋深增至2m以上,深度超限;横滚突增至15°附近,横滚也超限,此时航行器将处于十分危险的状态,因此在实际航行中要避免这种情况的发生。
5 结语
本文结合半潜式航行器平自身的特点建立其坐标系:固定坐标系和运动坐标系以及它们之间的坐标变换。然后在固定坐标系下运用刚体动力学定理,以及对半潜式航行器进行受力分析,得出了适合描述其运动的空间运动方程,并将其转换运动坐标系中,建立其运动学模型。通过半实物仿真得出以下结论:
1) 结合半潜式航行器自身特点,建立的空间运动方程能够较精确地描述半潜式航行器的运动特性;
2) 前水平舵角在调节半潜式航行器深度方面起决定性的作用,通过调节前水平舵角可以很好地控制半潜式航行器的深度;
3) 在半潜式航行器回转航行中,航速和垂直舵角都是影响其回转半径的重要因素,其中垂直舵角是最主要的因素,当航速高速回转航行时,航行器的深度会增加。
[1] 蒋新松,封锡盛,王棣棠.水下机器人呢[M].辽宁:沈阳科学技术出版社,2000:12-17.
[2] 李荣,花肖军,等.单纯行算法水雷搜索研究[J].舰船科学技术,2013,35(10):142-144.
[3] 施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[4] 李殿璞,赵爱民,迟岩.水下机器人运动控制和仿真的数学模型[J].哈尔滨工程大学学报,1997,18(3):22-30.
[5] Li Ye, Liu Jian cheng, Shen Ming Xue. Dynamics model of underwater robot motion control in 6 degrees of freedom[J]. Journal of Harbin Institute of Technology,2005,12(4):456-459.
[6] 朱怡.水下潜器水动力模型简化及参数辨识研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2007:16-19.
[7] 任康旭.载人潜水器运动控制系统研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2009:13-16.
[8] 常文君,刘建成,于华南,等.水下机器人运动控制与仿真的数学模型[J].船舶工程,2002(3):58-60.
[9] Feijun Song, P. Edgar An, Andres Folleco. Modeling and Simulation of Autonomous Underwater Vehicles: Desin and Implementation[C]//IEEE Jouranal of Oceanic Engineering,2003,28(2):283-296.
[10] 李晔,刘建成,徐玉如,等.带翼水下机器人运动控制的动力学建模[J].机器人,2005,27(2):128-131.
[11] Chanop Silpa-Anan. Autonomous Underwater Robot: Vision and Control[D]. Canberra: ME Thesis, The Australian National University,2001:9-34.
Research on Motion Characteristics of Semi-submersible Vehicles
YI Gufeng
(710 Research Institute, CSIC, Yichang 443000)
The paper researched on motion characteristics of semi-submersible vehicles, set up its kinematic model, and made a hardware-in-the-loop simulation form two aspects of depth control and rotary navigation. Simulation results showed that the former level rudder was a major cause which influenced depth control, and obtained the corresponding relationships of the former level rudder and depth control. Rotary navigation studied the relationship of vertical rudder angle and speed and radius of gyration, which knew radius of gyration when the vertical rudder angle was changed under a certain speed. This work accurately mastered motion of semi-submersible vehicles, and laid a foundation for mechanism design and accurate control of semi-submersible vehicles.
semi-submersible vehicles, kinematic model, hardware-in-the-loop simulation, radius of gyration
2014年12月13日,
2015年1月27日
易谷丰,男,硕士,研究方向:水下特种装备探测与控制。
E835
10.3969/j.issn1672-9730.2015.06.036
