基于GO-FMEA法的远程火箭炮随动系统故障诊断*
2015-03-14盛敏军
盛敏军
(陆军军官学院 合肥 230031)
基于GO-FMEA法的远程火箭炮随动系统故障诊断*
盛敏军
(陆军军官学院 合肥 230031)
针对远程火箭炮随动系统故障诊断复杂和时序性要求高等问题,论文引入GO法分析其可靠性,得到模块故障概率。根据模块故障概率值大小,优先利用FMEA法建立故障字典,对模块故障进一步分析,确定检测顺序。两种方法综合使用,优化了故障分析流程,提高故障诊断效率。
随动系统; 故障诊断; GO法; FMEA法
Class Number TJ393
1 引言
远程火箭炮随动系统是其实现自动化操瞄的关键部件。其性能直接影响到武器系统的射击密集度和射击准确度。该随动系统由17个部件组成,结构复杂,是典型机、电和液组合的复杂装备。快速准确的故障诊断与维修是保证其有效工作的重要内容。现有故障树分析法对故障进行分析[1],其工作量大,表达复杂,GO法是以成功为导向的系统可靠性概率分析技术,适用于多状态和有时序系统的可靠性分析[2]。运用GO法和FMEA法[3]这两种方法逐层分析,可优化诊断流程,即利用GO法分析系统模块故障定量值,确定模块故障可能顺序;利用FMEA分析模块故障原因。
2 随动系统可靠性
GO法是一种系统可靠性的分析方法,它的分析过程是从输入事件开始,经过一个GO模型的计算确定系统的最终概率。GO法的发展是基于决策树理论,它的基本思想是把系统原理图、流程图或工程图直接按一定规则翻译成GO图。GO图的建立过程是用GO操作符去代替具体的部件;用信号流连接操作符,代表具体的物流。
2.1 电气伺服系统工作原理
电气伺服系统接收火控计算机发出的方位指令诸元,自动求取诸元与火箭炮方向实际间的误差、控制规律计算与D/A转换,经过扩大机,控制直流电动机带动方向机构,实现火箭炮方向调炮,原理图如图1所示。
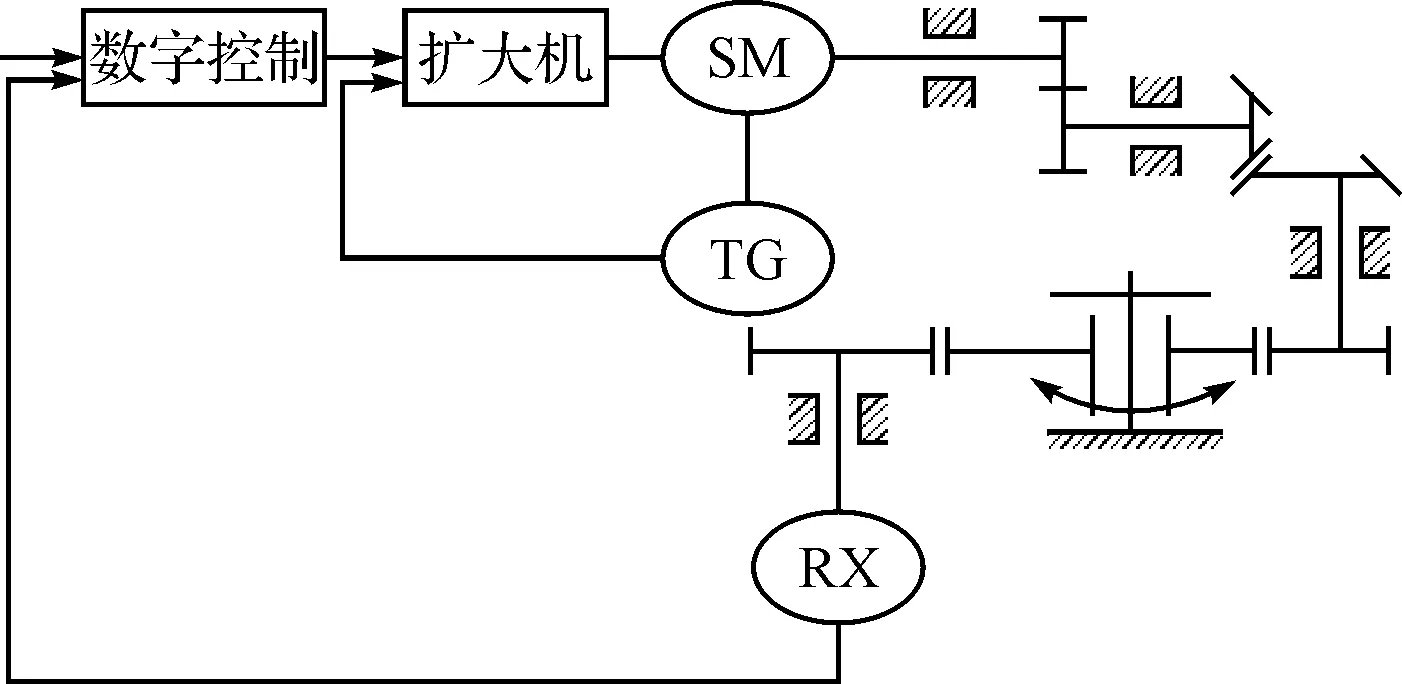
图1 随动系统工作原理图
2.2 电气伺服系统GO图
从工作原理图,可以看出随动系统的信号流是有循环的,考虑到当前操作符不能分析闭环系统,针对此类情况,按照GO法基本原理,建立闭环系统的操作符,定义为第18类操作符C[4]。模型如图2所示。

图2 GO模型图
该模型的基本状态可描述为输入信号S1正常,操作符C正常时,输出信号R正常;当输入信号S1和操作符有一个或一个以上故障时,输出信号R就为故障。由第18类操作符C考虑反馈元件,建立如图3等效模型,等效操作符Cd工作状态描述为操作符C和反馈回路控制器操作符同时为正常时,等效闭环回路操作符Cd为正常;两个操作符有一个或一个以上为故障时,等效操作符就为故障,等效后模型同闭环系统一致。
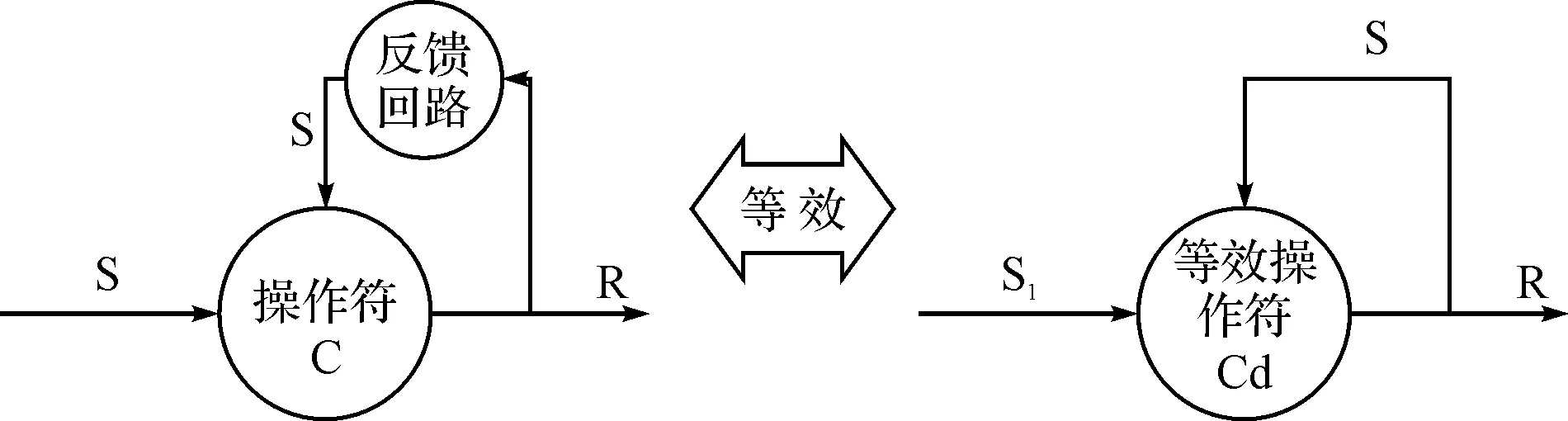
图3 等效转换
据此,根据系统原理图,定义其操作符数据如表1所示。
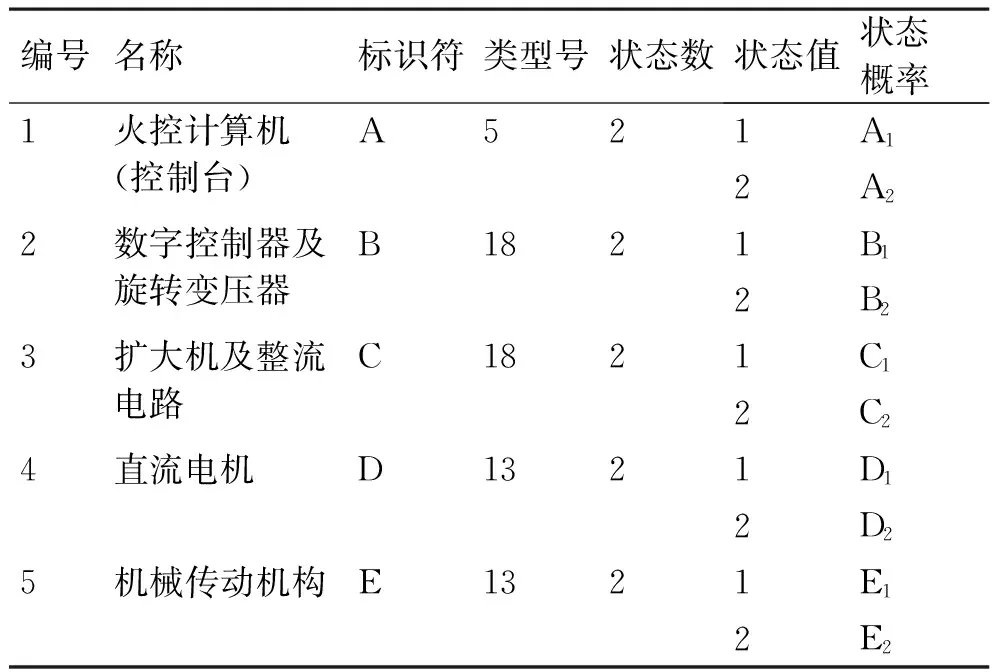
表1 电气伺服系统操作符数据
根据表1构建电气伺服随动系统GO图。

图4 电气伺服随动系统GO图
2.3 GO运算

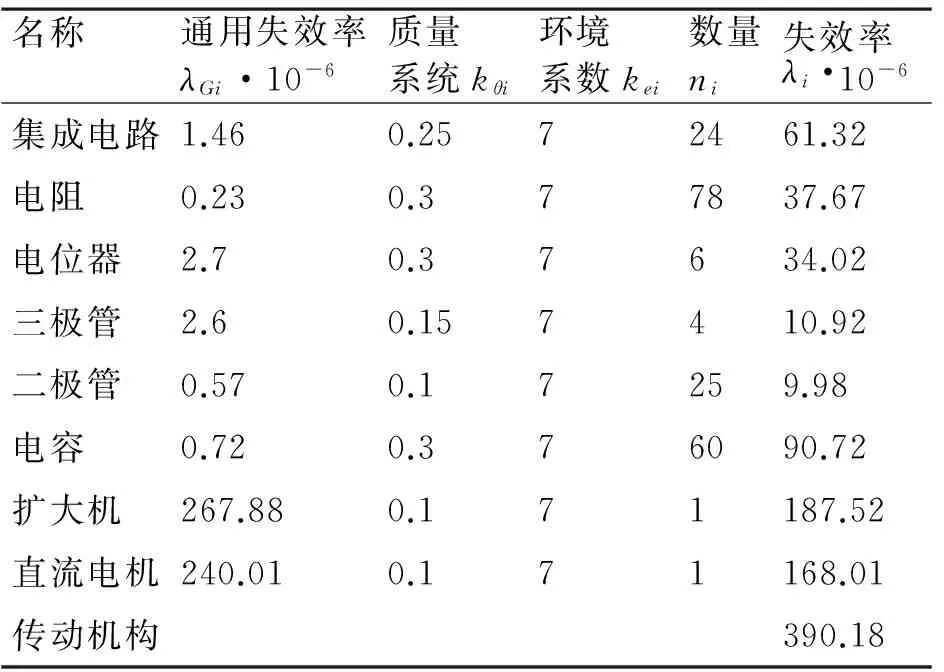
表2 电气伺服随动系统零部件失效率
运用模型,带入相关数值,计算输出信号7状态组合失效概率值。排序如表3所示。
表3中序号0代表电气伺服随动系统的可靠性,序号1~15代表随动系统失效由大至小的15种排列状态,失效率越大的状态组合代表出现故障的概率越高,检测时优先进行故障检测,从而得出系统故障时模块检测顺序[8]。

表3 输出信号7状态组合概率表
3 故障诊断策略
运用GO法分析电气伺服随动系统故障状态组合,并对模块检测优先级进行了排序。采取GO法不能具体到元器件或组件[9],采用故障模式及影响分析(FMEA)分析模块的故障信息。故障模式及影响分析能分析系统的每一个组成部分可能存在的故障模式及其可能的故障影响和原因[10]。GO法和故障模式及影响分析法的故障诊断策略:
1) 通过GO法找出随动系统故障发生模块状态组合,并定量计算出各种组合概率的大小,按照组合状态顺序进行模块检测。
2) 根据模块检测顺序在FMEA表查找模块下级零部件故障发最小割集,精确定位故障部位。
根据表3排序,当电气伺服随动系统出现故障时,第一步检测模块5的状态,再检测模块2数字控制器的状态,由于数字控制器检测维修定位到PCB板级,引入表4数字控制器FMEA分析表,对模块内部进一步检测定位。

表4 数字控制器FMEA分析表
4 结语
根据随动系统的特点,建立其GO图,运用GO法分析随动系统模块故障组合概率,对模块故障检测进行了排序。利用FMEA影响分析表分析模块故障,为检测维修人员快速精确定位故障操作提供决策依据。
[1] 曲玉琨,钟良海.基于故障树分析法的某型火炮随动系统故障分析[J].四川兵工学报,2010(12):11-15.
[2] 赵蕾,韩红新,等.基于FTA-FMEA联合法综合诊断电子设备故障[J].舰船电子工程,2007(3):216-218.
[3] 沈祖培,黄祥瑞.go法原理及应用[M].北京:清华大学出版社,2004:25-40.
[4] 徐志,陈彬兵.可维修闭环系统GO法等效代换思考[J].通信技术,2009(12):31-34.
[5] 沈祖培,黄祥瑞.复杂系统可靠性的GO法精确算法[J].清华大学学报,2002,42(5):569-572.
[6] 裴东,袁建虎,等.远程多管火箭炮随动系统可靠性分析[J].解放军理工大学学报,2003(3):56-58.
[7] 李良巧.机械可靠性设计与分析[M].北京:国防工业出版社,1998:55-68.
[8] 杨为明.可靠性.维修性.保障性总论[M].北京:国防工业出版社,1995:106-138.
[9] Shen Zupei, Gao Jia. A new qualification algorithm for the GO methodology[J]. Reliability Engineering and System Safety,2000(67):241-247.
[10] Chu B B. GO Methodology: GO User Manual[J]. Electric Power Research Institute,1983(4):188-193.
Fault Diagnosis of Follower System of Long-range Multi Launcher Rocket System Based on GO-FMEA Method
SHENG Minjun
(Army Officers Academy, Hefei 230031)
The fault diagnosis process of follower system is complex in a long-range multi launcher rocket. To solve this problem, GO methodology is proposed to analyze the reliability of system to get module failure probability. According to the value of the fault probability, the fault dictionary is established to further analyze the module failure. The process and efficiency of failure analysis are optimized and improved by the comprehensive use of the two methods.
follower system, fault diagnosis, GO method, FMEA method
2014年12月1日,
2015年1月19日
盛敏军,男,硕士研究生,研究方向:武器装备虚拟维修。
TJ393
10.3969/j.issn1672-9730.2015.06.031
