一种用于惯导系统车载试验的速度基准系统*
2015-03-14李志文
文 钢 李志文 刘 波
(1.海装重庆局 重庆 400042)(2.重庆前卫科技集团有限公司 重庆 401121)
一种用于惯导系统车载试验的速度基准系统*
文 钢1李志文2刘 波2
(1.海装重庆局 重庆 400042)(2.重庆前卫科技集团有限公司 重庆 401121)
介绍了一种自行研制的用于捷联惯导车载试验的速度基准系统。该系统由卫星导航装置、车速采集装置和主控计算机组成,能够实时输出满足一定精度要求的速度数据,可作为捷联惯导跑车试验中的速度基准,用以模拟其它测速设备的输出。经过实际车载试验验证,该基准系统组成简单,功耗、体积、重量和速度精度满足捷联惯导车载试验要求,能够做到在无卫星导航信息条件下,模拟实现组合导航系统的测速功能。
捷联惯导; 组合导航; 车载试验; 速度基准系统
Class Number U674.7
1 引言
应用于水中的捷联惯导,往往采用和水中测速设备(如水声测速设备、桨速监测设备或流速监测设备)相结合的组合导航方式,以提高其长时间导航精度[1~4]。在研制过程中,为了验证捷联惯导系统和其他导航辅助设备的组合导航性能,需要做大量试验。从控制试验成本和缩短研制周期方面考虑,可用车载试验[5~6]代替部分水中试验。车载试验中使用的试验车,需要配置定位、姿态、速度等导航信息基准系统,本文介绍一种自行研制开发的速度基准系统,该基准系统以车速作为辅助设备的输出,模拟水中多普勒计程仪输出,实现类似捷联惯导系统结合多普勒计程仪的组合导航方式和效果。
2 组合导航基本原理
将惯导系统的输出信号与其他导航辅助设备的独立测量结果进行比较,根据比较结果校正惯导系统的输出,获得比单独使用惯导系统更好的导航性能,这种系统称为组合导航系统。
组合导航系统的导航辅助设备中,较普遍使用的辅助设备有:GPS、星体跟踪器、数字地图、磁传感器、雷达成像系统等。而在使用捷联惯导的水中组合导航系统使用较多的辅助设备是提供实时速度测量结果的多普勒计程仪。
图1给出了典型的组合导航系统基本工作原理。组合导航算法主要应用卡尔曼滤波技术,对辅助设备的传感器输出应用卡尔曼滤波方法进处理,得出惯性导航位置、速度、姿态以及其他参数的最优估计值,由最优估计值作为校正后的惯性导航系统输出。图中虚线表示该数据流在某些导航系统中不存在。

图1 组合导航系统基本工作原理图
3 系统设计
3.1 需求分析
本文研制的速度基准系统,主要实现两个功能: 1) 提供一个可用于比较的速度基准; 2) 模拟实现水中组合导航系统的测速设备功能。
设计该基准系统时,主要考虑以下因素:
1) 为方便在试验用机动车上使用,系统的功耗、体积、重量都不能过大;
2) 考虑到试验车行驶在规划线路过程中的一些实际情况,如经过隧道、峡谷等无法接收卫星导航信息的环境,系统必须能在这些环境下正常工作;
3) 根据应用于水中的捷联惯导系统[7~8]实际要求,数据更新间隔满足秒级、速度精度满足厘米每秒级即可。
因此,该基准系统主要技术难点在于无卫星导航信息时,如何提供符合精度要求的速度基准数据。
3.2 基准系统组成
基准系统主要由卫星导航装置、车速采集装置及其软件、主控计算机及其软件等三部分构成。其中车速采集装置及其软件、主控计算机软件为自行研制,其它采购自市场中成熟产品。
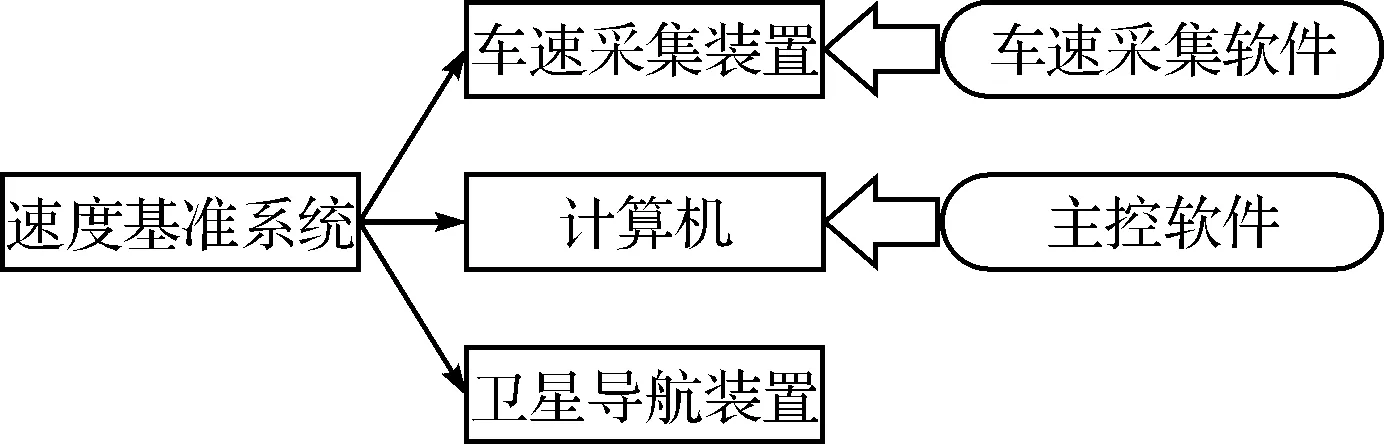
图2 速度基准系统组成示意图
车速采集装置由自制电路板及其配套软件组成。电路的核心处理器件采用ATMEL公司的AT89C51信号单片机。
主控计算机选用Lenovo公司的昭阳E46A型号笔记本计算机。安装WindowsXP操作系统,运行的主控软件用VC++6.0开发。
卫星定位装置选用星网宇达公司的XW-3661。其单点定位精度达到1.8m RMS,速度精度达到0.02m/s,数据更新间隔最小可设置为100ms,发送标准$GPGGA,$GPVTG帧头报文。该定位装置由天线、电缆、接收机三部分组成。
工作时采用不间断电源给系统供电,系统各部分电路连接方式如图3所示。

图3 车载速度基准系统各部分电路连接示意图
3.3 工作原理
用卫星定位装置接收卫星导航信息,辅以监测试验车车轮转动获得速度信息,应用数据融合技术实现全地形工作。其流程如图4所示。
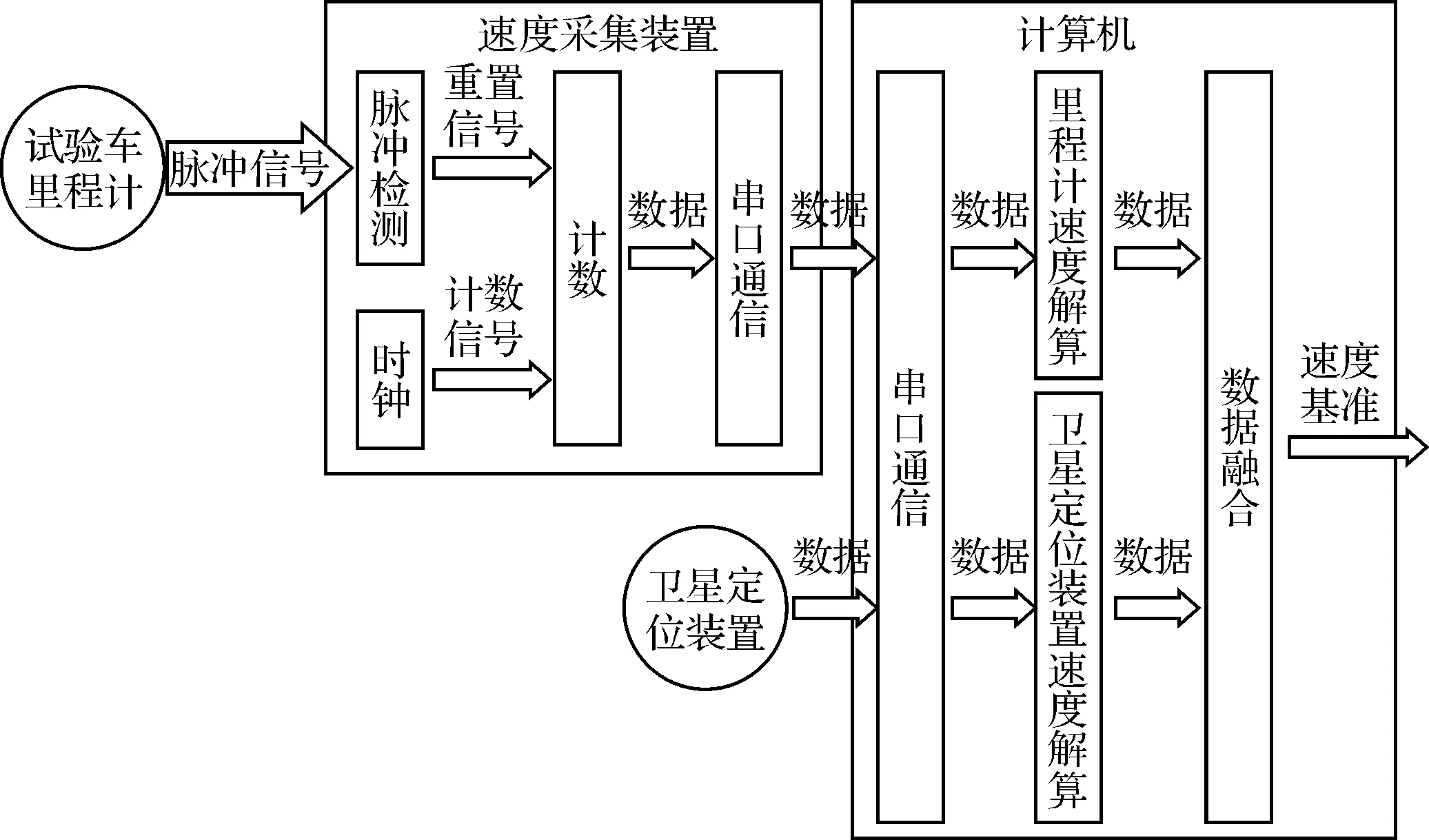
图4 速度基准获取原理图
3.3.1 车速采集
车速采集装置检测试验机动车车轮转动形成的脉冲信号,采集两次脉冲信号间的时间间隔,通过串口发送给主控计算机。这些脉冲信号来自试验车车轮上的霍尔器件。记下连续两次脉冲信号间的时间间隔,实际上就是记录了车轮转过一圈的时间。
主控计算机获得脉冲间隔时间后,带入以下公式计算出车速:
(1)
式中:V为车速,单位是km/h;Thi为脉冲宽度,常量,单位是0.1ms;T为脉冲间隔时间,单位是ms。
这里需要说明的是,试验车型不同,计算车速的公式可能不同。
3.3.2 数据融合
利用数据融合[9~10]技术对按时序获得的观测信号,按照一定准则进行自动分析、综合,以完成系统要求的决策任务。
该基准系统应用数据融合技术实现以下功能:
1) 用卫星导航速度标定车速;
2) 用车速剔除卫星导航的跳点数据;
3) 在卫星导航速度无法获得时,输出标定后的车速;
4) 转弯时,由于卫星导航速度实时性不足,系统输出标定后的车速。
4 系统样机试验结果
4.1 功耗、重量和体积
系统样机组成部分的功耗、重量、体积如表1所示。
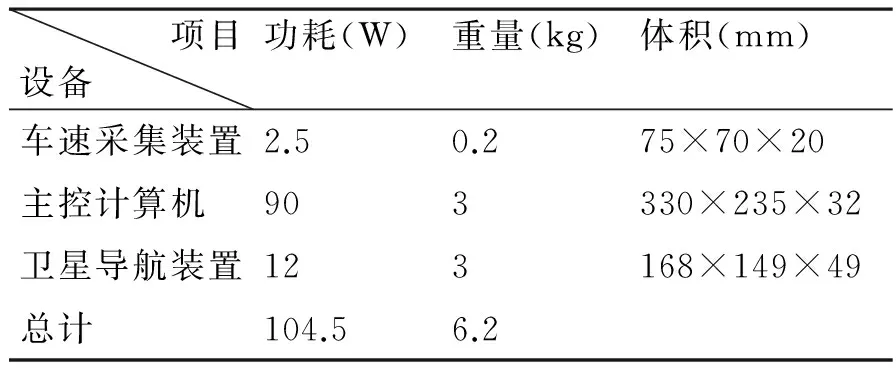
表1 系统组成部分功耗、重量、体积统计表
表1给出的测试结果表明,样机完全适用于车载方式。
4.2 速度精度
在正常无遮挡环境下,该基准系统能接收到卫星导航信息,性能主要由卫星导航装置决定。针对无法接收卫星导航信息的情况,设计了以下步骤的实验来验证系统样机精度:
1) 断开卫星导航装置和主控计算机间的物理连接,使主控计算机无法接收卫星导航信息;
2) 系统一直工作在无卫星导航信息的状态。然后,用另一台计算机同步实时记录卫星导航装置和速度基准系统输出;
3) 实验结束后,用卫星导航装置输出的定位数据计算航程和平均速度,将计算结果作为基准和系统车速采集装置在该段时间内输出的平均速度做比较。
实际车载试验共进行了6次,试验测试结果见表2。表中基准值是卫星导航数据计算的速度值,与系统样机的速度采集输出值的差值满足设计的厘米每秒的精度要求。
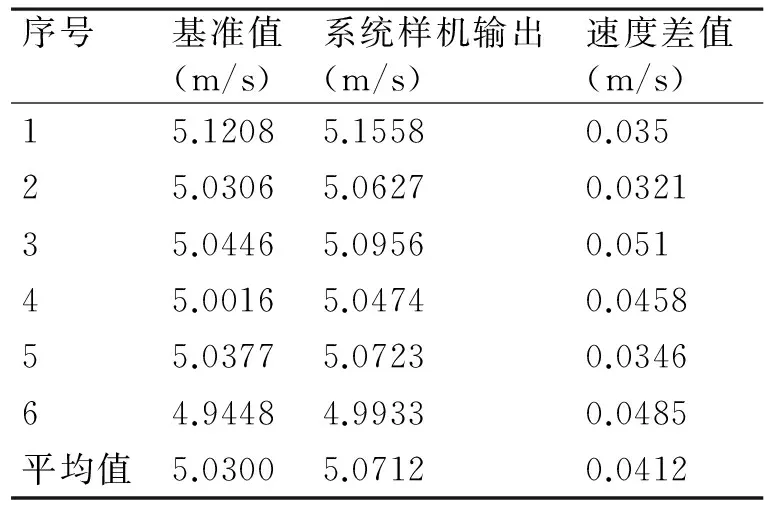
表2 车载试验速度测试结果
试验中,记录的系统输出数据更新间隔如图5所示,平均更新间隔1s,最大1.001s,最小0.9984s。
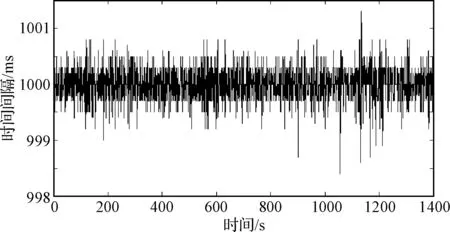
图5 试验中速度基准系统数据更新间隔
使用本系统提供的速度数据,做一个时间同步,再引入一些特定特征量,即可模拟其他水中速度测试设备,从而实现车载试验对水中试验的模拟。图6为某次实际试验中模拟多普勒计程仪速度输出的数据曲线。
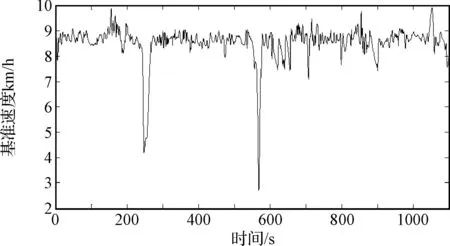
图6 模拟多普勒计程仪速度输出数据曲线图
5 结语
本文研制开发的车载速度基准系统,组成简单,功耗、体积、重量和精度等都满足车载试验要求。系统样机经过实际使用验证,工作可靠,能够满足水下捷联惯导研制过程中的车载试验需求。使用该车载速度基准系统作为辅助测速设备,一方面可以降低水下捷联惯导的研制成本,另一方面能有效缩短研制周期,有很高的实用价值。该系统具有良好扩展性,可结合实际应用需要,进一步扩展完善。
[1] 秦瑞,王顺伟,袁晓峰,等.多普勒测速仪/捷联惯导组合导航技术研究[J].战术导弹技术,2006(6):68-72.
[2] 钱辉,丁永忠.大航程AUV SINS/DVL组合导航定位精读研究[J].兵工自动化,2010,2(2):46-48.
[3] 李涛,练军想,曹聚亮,等.GNSS与惯性及多传感器组合导航系统原理[M].北京:国防工业出版社,2011:146-150.
[4] 杨波,王兆刚,柴燕,等.惯性基高精度组合导航方法研究与仿真[J].计算机测量与控制,2009,17(5):940-943.
[5] 丁文娟,李岁劳,熊伟.捷联惯导系统/里程计自主式车载组合导航系统研究[J].计量技术,2006,26(1):14-16.
[6] 商庆瑞,吴晴,徐喆,等.车载导航现状及GPS/DR定位系统车载试验[J].现代电子技术,2006,9(9):113-115.
[7] 严卫生,徐德民,李俊,等.自主水下航行器导航技术[J].火力与指挥控制,2004,29(6):11-16.
[8] 赵涛,刘明雍,周良荣.自主水下航行器的研究现状与挑战[J].火力与指挥控制,2010,35(6):1-6.
[9] 郝润泽,杨瑞朋.多传感器数据融合技术研究现状及军事应用[J].武器装备自动化,2007,26(4):16-23.
[10] 于德新,杨兆升,刘雪杰.基于卡尔曼滤波的GPS/DR导航信息融合方法[J].交通运输工程学报,2006,6(2):65-69.
A Kind of Speed Reference System for INS Vehicle-Carried Test
WEN Gang1LI Zhiwen2LIU Bo2
(1. Representative Bureau of Naval Equipment Department in Chongqing, Chongqing 400042) (2. Chongqing QianWei Tech ltd, Chongqing 401121)
This paper introduces a kind of speed reference system, which is used for SINS’ vehicle-carried test. This system is composed of GNSS, vehicle speed acquisition instrument, and a master computer. It can provide the vehicle’s real-time speed data satisfying given precision requirement as the speed reference, or simulating the output of other speed acquisition instrument. Based on the vehicle-carried test, this system composition is simple, and its power dissipation, size, weight and speed data precision can meet the requirements of SINS vehicle-carried test. It also can simulate speed acquisition function of integrated navigation system without satellite navigation information.
strapdown inertial navigation system, integrated navigation, vehicle-carried test, speed reference system
2014年11月5日,
2014年12月7日
文钢,男,博士,工程师,研究方向:捷联惯导系统研发、水中目标体的回声特性。李志文,男,工程师,研究方向:捷联惯导系统研发。刘波,男,工程师,研究方向:捷联惯导系统研发。
U674.7
10.3969/j.issn1672-9730.2015.05.011
