燃气舵推矢装置稳态及动态气动特性研究
2015-03-13宋扬
宋扬

摘要:通过CFD数值计算分别对某燃气舵推矢装置的稳态气动特性和动态气动特性进行研究和分析,获得该燃气舵在阶跃信号控制下不同舵偏角的稳态气动特性和采用正弦控制规律时的连续动态气动特性,将数值模拟结果与实际地面点火试验结果进行比较,两者吻合较好。
关键词:燃气舵;推矢装置;稳态气动特性;动态气动特性
中图分类号:TJ760.3+52 文献标识码:A 文章编号:1673-5048(2014)02-0041-03
0、引言
当火箭发动机在初始工作进行姿态变化和大过载机动时多采用矢量控制手段,阻流致偏式的燃气舵推矢装置在固体火箭发动机矢量控制中最为常见,特别是燃气舵装置由于其较低的控制力矩、较小的空间占用率、快速的反应能力已经在多种导弹中有所应用,因此倍受关注,成为当前研究较多的内容。
在对燃气舵推矢装置进行地面点火试验时,虽然能够较精确地得到舵片的实际受力情况,但是由于试验件的加工周期过长,并且试验用燃气舵片的材料和发动机的价格昂贵,因此采用数值计算配合试验验证的方法进行推矢装置燃气舵气动特性研究是十分必要的。本文采用CFD数值计算的方法分别对某燃气舵推矢装置的稳态气动特性和动态气动特性进行研究,获得了该燃气舵装置在阶跃信号控制下不同舵偏角的气动特性和采用正弦控制规律时的连续动态气动特性,并与实际地面点火试验结果进行对比。
1、模型建立
1.1 物理模型
本文研究的燃气舵推矢装置与长尾喷管结构如图1所示。长尾喷管由收敛段、等直段、喉部和扩张段组成,燃气舵由舵基、舵轴和舵体组成。
1.2 网格划分和边界条件
1.2.1 网格划分
图2所示为本次计算所采用的网格图。采用Gambit网格划分软件生成,网格一共121万,由于定常流场计算和非定常流场计算所采用的网格具有相似性,因此在此仅仅给出定常计算的网格图。
1.2.2 边界条件
仿真边界条件主要包括:质量进口边界、压力出口边界和无滑移绝热固壁边界条件。具体边界条件设置如图3所示。根据导弹发动机热力计算,相关计算参数如表1所示。
1.3 计算方法
1.3.1 模型简化和假设
由于固体火箭发动机的尾喷流属于超音速流动,再加上阻流致偏的燃气舵装置,将会使尾流情况变得相当复杂,因此在此做出如下假设:
(1)固体推进剂在燃烧室内部燃烧不充分,在导弹发动机燃气流中会存在复杂的复燃现象,复燃程度随推进剂成分和燃烧室压强而异,本文简化为纯流动问题:
(2)为增加推进剂能量,多添加金属粉末,这样不可避免地造成燃气流中含有大量的凝相和液相粒子,本文统一简化为纯气相问题:
(3)定压比热根据所计算导弹发动机内压、推进剂组分和发动机结构参数,经过热力计算参数得到,在燃气流中略有变化,但变化不大,在实际计算中视为常值:
(4)略去质量力的影响。
1.3.2 湍流模型及壁面函数
采用CFD仿真软件FLUENT6.3.26进行数值模拟。流场控制方程为三维N-S方程,计算过程选用耦合隐式方法。湍流模型为RNGk-ε二维方程模型,在壁面附近采用非平衡壁面函数进行处理,适用于存在严重压力梯度的分离、再附等流场,粘性系数由Sutherland公式确定。
1.3.3 动网格
本文采用网格平滑光顺与局部网格重构相结合的方法进行动网格计算,其中舵体设置为刚体转动,舵轴与舵基的交界面设置为变形面,在该变形面上实现网格光顺与局部网格重构。
2、计算结果及分析
燃气舵推力矢量装置的主要气动参数有:控制力、滚转力矩、铰链力矩、负载力矩、燃气舵引起的推力损失、舵间干扰等。根据所要对比的试验情况主要计算了燃气舵装置双舵联动阶跃信号控制情况下的水平控制力、双舵差动阶跃信号控制情况下的横滚控制力矩以及正弦控制规律动态控制情况下的水平控制力,下面分别就稳态和动态仿真结果进行分析和讨论。
2.1 燃气舵稳态气动特性仿真
2.1.1 双舵联动仿真结果
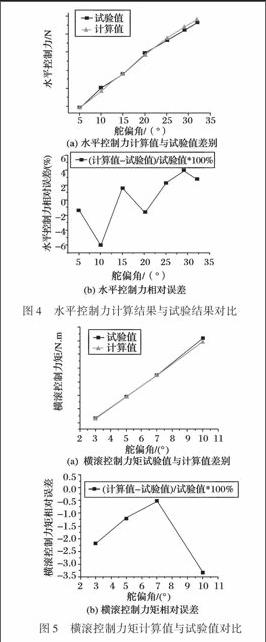
在进行稳态双舵联动情况下的仿真计算时,本文主要计算了5°,10°,15°,20°,25°,29°和32°双舵阶跃信号情况下的水平控制力。
图4所示为水平控制力计算结果与试验结果对比。图4(a)为双舵联动情况下的水平控制力计算结果及其与试验结果之间的误差,由图4(b)中数据可见,双舵联动时的水平控制力最大计算误差约为6.14%(出现在10°舵偏角时),最小计算误差为1.48%(出现在5°舵偏角时),其余舵偏角情况下的计算与试验误差均在4%以内。
2.1.2 双舵差动仿真结果
在进行稳态双舵差动情况下的仿真计算时,主要计算了3°,5°,7°和10°双舵阶跃信号情况下的横滚控制力矩。
图5所示为横滚控制力矩计算值与试验值对比。由图5(b)中数据可见,双舵差动情况下的横滚控制力矩最大计算误差为3.15%(出现在10°舵偏角时),最小计算误差为0.35%(出现在7°舵偏角时),其余舵偏角情况下的横滚控制力矩计算误差均在2.5%以内。
2.2 燃气舵动态气动特性仿真
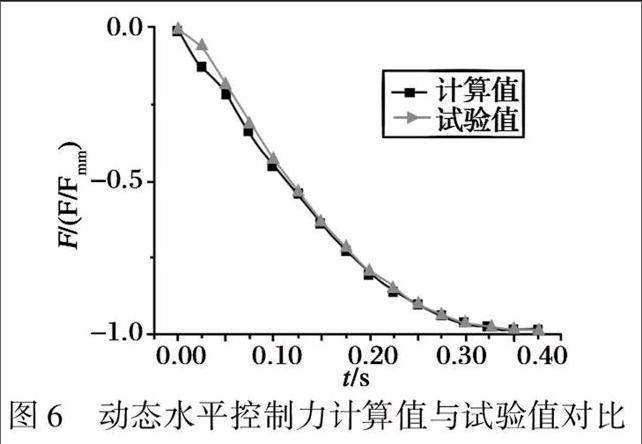
燃气舵动态气动特性仿真需要计算的是舵片按正弦规律进行运动,舵片的运动周期为1°5 s时不同时刻的瞬态单舵水平控制力,其中舵片的运动规律为
θ=Asin[(2πt/T)+ф)]式中:A为舵偏角幅值;T为舵片运动周期(本文中的舵片运动周期为1.5 s);ф为初始舵偏角(本文中初始舵偏角为0);θ为瞬时舵偏角。
图6为燃气舵装置动态水平控制力的计算结果与试验结果对比图。由图可见,在舵片刚开始进行运动的0.05 s内计算值相对于试验值的误差较大,原因可能为非定常计算时,要先进行定常计算,而定常计算在最初可能没有达到完全收敛,对非定常计算的计算结果产生较大影响:而当舵片运动到0.05 s以后,计算值相对于试验值的误差已经很小,基本控制在5%以内,这主要是由于流场情况趋于稳定,与实际试验情况越来越接近。
3、结论
根据以上研究与试验对比,得出如下结论:
(1)定常计算结果中双舵联动下的水平控制力计算结果与试验结果最大误差为6.14%,出现在10°舵偏角时,最小误差为1.48%,出现在5。舵偏角时,其余舵偏角情况下误差均在4%以内;
(2)定常计算结果中双舵差动下的横滚控制力矩计算结果与试验结果最大误差为3.15%,出现在10°舵偏角时,最小误差为0.35%,出现在7°舵偏角时,其余舵偏角情况下误差均在2.5%以内;
(3)动态计算结果中水平控制力的计算结果与试验结果基本吻合,在前0.05 s的周期内误差较大,在0.05 s以后计算结果与试验值的误差基本在5%以内。
