一种用于目标探测跟踪的红外变焦系统设计
2015-03-13李正王文生张桂源
李正 王文生 张桂源

摘要:针对军用装备目标探测的应用需求,设计了一种15倍非制冷式红外变焦系统。该变焦系统工作于8~12 μm远红外波段,F数为3,在20~300 mm范围内系统能够连续变焦且像质较好,在最大截止频率为11 lp/mm时,各焦距位置的MTF曲线与衍射极限十分接近。在长焦距、大变倍比的前提下,结构依然紧凑,总长度有效控制在330 mm。在给定公差范围内,像质变化满足实际应用允许的变化范围。最后,该系统与联合变换相关器相结合,完成了对目标的探测实验。实验结果表明,该红外变焦系统能够很好地探测识别目标。
关键词:红外变焦系统;远红外;光学设计;目标探测;目标跟踪;联合变换相关器
中图分类号:TJ760;TN215 文献标识码:A 文章编号:1673-5048(2014)02-0027-05
0、引言
近年来,随着光学相关技术的迅猛发展,越来越多的武器装备将红外变焦系统和联合变换相关器结合在一起对目标进行探测与跟踪。红外变焦系统是武器瞄准系统的重要组成部分,能够连续获取特定焦距范围内目标的红外辐射能量,既可大视场搜索视野区域,也可小视场详察目标。联合变换相关器对变焦系统的成像进行图像处理后可获取目标位置与俯仰角等重要信息,火控跟踪系统以此为依据完成精确制导。可以说,红外变焦系统的成像质量决定着目标识别精度的高低,同时制约着武器装备战斗能力的强弱。
国外对红外变焦系统有相当多的研究,如Barr&Stroud公司针对8~13 μm远红外波段设计了一系列应用于扫描系统的变焦镜头,能够达到10倍最佳变焦比。Wescan公司针对3~5 μm中红外波段设计了一款F数为4的20倍变焦系统,焦距在20~400 mm范围内变化。国内对变焦系统的研究起步较晚,但发展迅速,目前已有多家单位具备红外变焦系统设计和加工的能力。浙江大学光学工程中心设计了一种F数为2的远红外波段变焦系统,变倍比为3,焦距在32~96 mm间连续变化。针对折反式的变焦结构,长春光机所研发了一种远红外波段的大口径变焦系统,焦距在750~3000 mm的范围内变化。
对于红外图像采集的变焦系统来说,存在红外光学材料种类较少且价钱昂贵等限制,在兼顾应用所需变焦比的同时,还要使系统具有大相对孔径,从而获取足够的光通量完成远距离目标探测。本文基于武器装备瞄准系统的需求设计了一款变倍比为15的红外变焦光学系统,F数为3,焦距在20~300 mm范围内连续变化。该系统由七片透镜组成,成像质量较好,结构紧凑。将联合变换相关器和红外变焦物镜结合在一起,突出红外变焦系统连续跟踪目标图像,联合变换相关器精准识别定位目标的优势,完成瞄准系统的设计。
1、原理
1.1 联合变换相关器
联合变换相关器是一种用于目标识别的光电混合系统,整个系统依照光学相关原理进行工作,利用数学方法对所接收信号的波长、相位以及强度等信息进行相关运算,最终得到相关峰输出,从而完成复杂区域内目标的探测跟踪。
图1所示为联合变换相关器工作原理图,激光束经衰减器、准直透镜组、偏振器等装置进行调制得到准直相干光,经半反半透镜分为两条光路,作为两次傅里叶变换的照明光源。PCI中存储着与探测目标相同的参考图像,由光学系统采集到待测区域的图像信息,经电脑制作与参考图像合为一张联合图像后一起写入电寻址液晶EAL-CD1,联合图像经一次傅里叶变换得到联合变换功率谱,由探测器CCD2接收并存储到PC2中,再将联合变换功率谱写入电寻址液晶EALCD2,经傅里叶逆变换,得到相关输出,被探测器CCD3获取传输到PC3中。当联合图像经过衍射现象和傅里叶透镜共同作用之后会得到二者的相关峰输出,通过观察相关峰的强度,确定参考图像与被测目标之间的一致性。若待测区域内不存在被测目标,则没有相关输出。相关输出的两个亮斑越明显,则探测到目标的可能性就越大,反之,则探测范围内存在目标的可能性较小。
1.2 变焦距光学系统
变焦距光学系统的焦距在限定范围内可进行改变,对于不同焦距位置,系统视场角不同,所观测到的景物大小也不同。为了保证变焦过程中像面位置稳定不变,需要某些组元作相对运动来补偿变焦过程产生的像面移动。采用机械补偿方法的变焦系统中,各运动组元按照复杂规律运动实现系统变焦以及像移补偿,在一定焦距范围内能够连续变焦,相对孔径基本不变,像面位置不发生变化。这种光学系统每个组元的光焦度均为定值,通过使运动组元作相对运动而改变各组元空气间隔,从而有效改变系统焦距。
以典型的四组元系统为例对变焦方程进行分析,只讨论产生像面位移的运动组元,变焦方程见式(1)。假设变倍组移动曲的距离,引起整个变焦部分的像面位移量为m23(1-m23)dq,补偿组的非线性移动距离由d△表示,它所引起的像移量为(1-m23)d△。保证系统像面位置稳定不变,两个运动组元产生的像移量之和必须为零。
其中:m2——变倍组的垂轴倍率:
m23——补偿组的垂轴倍率。
对变焦方程求解,得通解:
假设变倍组和补偿组的变焦起始位置位于系统长焦,此时,m2=m2l,m3=m3l,可得
将式(2)和式(3)进行减法运算,得变焦方程特解:
以补偿组的倍率为自变量建立方程:
对式(5)求解,得到互为倒数的两个根,该结果与物像交换原则相一致。
2、红外变焦光学系统设计
2.1 设计参数
本文研究的装备瞄准系统,针对目标的长波红外辐射进行探测识别,既可大视场搜索视野区域,也可小视场详察目标。变焦光学系统接收目标的红外福射能量后,由联合变换相关器对接收信号进行光学相关处理,得到目标与参考图像的一对相关输出,以此为依据完成制导对象的识别和位置判断。
通常来说,红外光学系统尽量采用大相对孔径设计,确保尽量多的光通量进入系统,以此弥补热辐射能量微弱的特点。本文根据瞄准系统的总体指标制定光学参数,该系统以8~12 μm长波红外作为工作波段,主要承担实时获取目标红外辐射的作用。为扩大该瞄准系统的探测范围,提升其远距探测能力,本文设计的光学系统在20~300mm焦距范围内进行15倍连续变焦,采用机械补偿方式补偿变焦过程中产生的像面漂移,相对孔径为3。选用320×240元的非制冷式红外探测器成像,像元尺寸为45 μm×45 μm,参照空间频率计算公式求得,该探测器具有11 lp/mm的极限分辨能力。系统具体参数见表1。
2.2 设计过程
通过查找专利库选取初始结构,该初始结构由九片透镜组成,材料均为锗红外材料。初始系统结构和成像质量如图2所示,MTF曲线比较低,且出现相位反转的伪分辨现象,像质不符合要求。应用Zemax软件作为优化工具,通过人工调校与自动优化相结合的方法修改初始结构,参照软件自带像质评价功能对成像质量进行评估。
红外光学材料价钱昂贵,且光线在经过多片透镜后会有部分能量损耗,从降耗、减重、降本等多方面考虑,将初始结构的九片透镜结构优化为七片式结构,系统总长约束为330 mm,系统紧凑,可在有限空间内进行应用。前固定组选用一片聚焦透镜,有效降低第二个组元(变倍组)上光线的入射高度,增加整个系统的视场角。变倍组在移动过程中承担光线偏角的变化量较大,所以依然保持两片透镜组合形式,正弯月透镜与负弯月透镜相互抵消自身产生的球差,同时也抵消了部分来自于前固定组的负球差。补偿组含一片负弯月透镜,两运动组元相对位置变化,从而完成系统变焦。后固定组总光焦度为正,应用三片透镜较好地校正自身像差和补偿其他透镜组剩余的正球差和轴外像差,同时有效缩短系统总长,并保证足够长的后截距。
色差是影响成像质量的重要因素之一,通常在光学系统中采用两种或两种以上光学材料能够有效校正色差。硫化锌是长波红外比较常见的光学材料,通常会将其作为负透镜材料。系统的初始结构中透镜材料较单一,均为锗材料,无法校正色差,在后固定组中选取一片负透镜替换为硫化锌材料,经优化设计校正系统色差,成像质量得以改善。光学系统镜片个数减少,使得个别透镜曲率增大,各个面承担的光线偏折角也有所增加,由此容易导致过大的高级像差。对系统中较敏感的面引入偶次非球面,以球面作为基底,二次项设置为变量进行优化,校正高级像差。该系统变焦范围较大,在焦距值每隔20 mm的位置便设置多重结构,确保仿真结果不失真,便于拟合平滑的凸轮曲线。经反复优化设计,最终得到符合技术指标、像质较好的光学系统,变焦系统最终设计结果的结构示意图见图3,多重结构参数如表2所示。
2.3 像质分析
通过多种性能指标考量成像系统的像质,兼顾每种类别的像差,将它们优化到一定范围内,则认为符合成像要求。本文通过三种综合评价函数来分析该系统的像质是否理想。
(1)MTF曲线
调制传递函数是能够对像质进行综合评估的性能判别依据,MTF曲线体现了不同空间频率下光学系统具有怎样的对比度传递能力。图4为系统调制传递函数曲线,在11 lp/mm截止频率处观察系统短、中、长焦三个位置,零视场、0.707视场和全视场的MTF曲线均高于0.5,其中中焦位置MTF曲线几乎与衍射极限重合,表明系统的设计结果比较理想。
(2)点列图
实际光学系统没有办法完全消除像差,物点经过光学镜头后在像面呈现许多离散的弥散斑图样,通过观察弥散斑的离散程度可以判别系统像质的高低。图5为不同焦距时变焦系统的点列图,对于短、中、长焦处弥散斑最大均方根半径分别为11.982 μm,11.002 μm和20.225 μm,多数能量聚集在艾里斑之内,且能够落在一个像敏单元内,据此成像质量达到系统要求。
(3)波像差
根据瑞利判据得知,如果波像差的最大值小于四分之一波长,则认为波面偏离程度在允许范围内。图6为设计结果的波像差示意图,短、中、长焦的最大波像差分别为0.0514λ,0.0326λ和0.1587λ,均小于0.25λ。但是由于瑞利判据仅关注波像差的极大值,而忽略了波面上的局部缺陷对整体造成的影响,在某些时候可能会过大估计系统的像差值。所以在对像质评估过程中,往往要综合多种评价函数一起对像质进行正确判断。
2.4 凸轮曲线
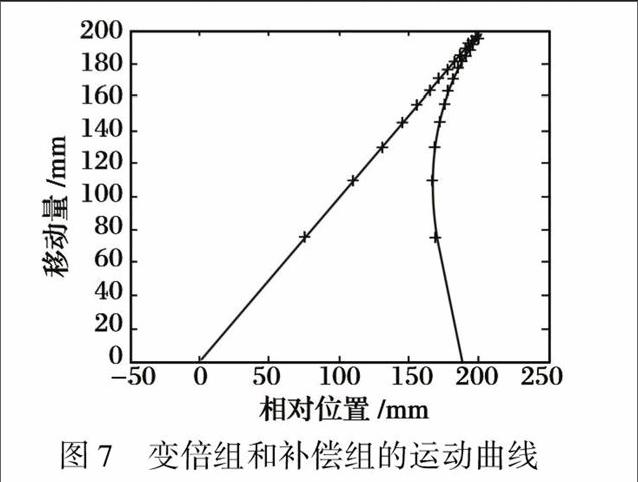
凸轮机构带动变倍组和补偿组一起作特定规律的相对运动,实现光学系统连续变焦。在变焦范围内,本文应用插值法对系统构建多个焦距位置,应用Matlab软件绘制拟合曲线,以此作为凸轮加工依据,凸轮曲线如图7所示。此时以20 mm短焦位置作为初始点,纵坐标为变倍组的线性移动距离,横坐标为两运动组元相对于初始点的位置。当系统由20 mm短焦向300 mm长焦位置变化的过程中,位于两端的运动组元逐渐靠近,然后一起向右侧移动,在靠近长焦位置处两组元具有最小空气间隔。
3、实验结果
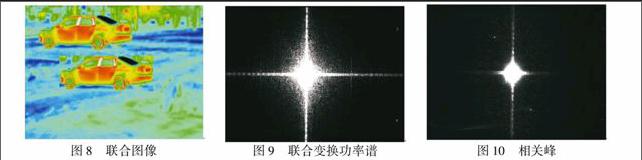
将红外变焦物镜与联合变换相关器相结合构建实验台,在野外进行红外目标探测性能试验。将红外变焦物镜采集到的实际图像与参考图像经电脑合成为一张联合图像(如图8所示),将其输入联合变换相关器,经一次傅里叶变换得到如图9所示的联合变换功率谱,联合变换功率谱经过傅里叶逆变换,得到图10中二、四象限的一对相关峰输出,表明已探测到目标。根据相关峰相对于坐标的位置,计算目标位置、方位角及俯仰角等重要信息,火控跟踪系统根据实时采集和计算的参数对目标进行精准打击。
4、结论
非制冷式红外变焦系统与联合变换相关器相结合作为某武器装备的瞄准系统应用,对8~12Ixm波段的目标红外辐射进行采集与处理,得到目标位置及俯仰角等重要信息。该系统能够在20~300 mm的大焦距范围内实现连续变焦,F数为3。系统成像质量较好,且结构紧凑,在15倍大变焦比的技术要求下,总长仅为330 mm,有效节约了武器装备内部可利用空间。通过对系统进行长焦距和大变倍比的设计来扩大瞄准系统的探测区域,通过焦距实时变化而减少探测盲点,最终达到灵活侦察目标的目的。
