基于DSP 的异步电动机转子磁链定向控制系统
2015-03-12杨云森任晓刚郭育华
杨云森,唐 娟,任晓刚,郭育华
(西南交通大学,成都610031)
0 引 言
在新电机控制理论、微电子技术、电力电子技术与微型计算机控制技术飞速发展的背景下,交流电机的控制方法得到了进一步的优化和改善。相对于直流调速,交流调速系统具备更快的响应速度、更大的调速范围和更准的调速精度。由于异步电动机本身是一个多变量、高阶次、非线性和强耦合的传动系统,所以需要通过坐标变换和按转子磁链定向,得到等效的直流电动机模型,再仿照直流电动机的控制策略对电磁转矩和磁链进行独立控制,从而使控制系统得以简化,这便是转子磁链定向控制(以下简称FOC)的基本思想。
1 异步电动机的数学模型
转子磁链定向控制方法的基本原理:在磁场定向中,把dq 坐标系置于以同步转速旋转的磁场中,并令旋转坐标系的d 轴完全重合于电机转子磁通的方向。因为对于异步电动机矢量控制系统,被控物理量为定子电流,所以在理论分析时,就必须建立起相关物理量同定子电流的一一对应关系。分析三相鼠笼式异步电动机,其模型在两相旋转坐标系下的电压方程如下:

式中:usd和usq为定子d 轴电压与q 轴电压;isd和isq为定子d 轴电流(励磁电流)与q 轴电流(转矩电流);Rs为定子绕组的等效电阻;Rr为转子绕组的等效电阻;Ls和Lr为定子绕组和转子绕组的自感;Lm为定子和转子绕组间的互感;p 为微分算子;ω1为同步旋转角频率;ωs为转差角频率。
两相旋转坐标系下的磁链方程如下:

式中:Ψr为转子旋转磁链;Ψrd和Ψrq分别为转子旋转磁链Ψr在d,q 轴上的分量。
在矢量控制系统中,被控量是电动机电流。联立式(1)和式(2)可以导出定子电流的两个分量定子励磁电流isd和定子转矩电流isq与其他物理量的关系:

式中:Tr=Lr/Rr是转子时间常数。
d,q 坐标系下,若满足磁场定向条件(Ψrq=0),则其电磁转矩方程如下:

式中:Te为电磁转矩;p 为电机的极对数。
由式(3)和式(5)分析可知,因为式(3)中有时间参量Tr,所以isd与Ψr的函数关系存在时滞,转子磁通不能及时响应定子电流的变化,但是若控制定子励磁电流isd使磁通保持恒定,则通过控制定子转矩电流isq就可以实现对Te的瞬时控制,从而使异步电动机具有如同直流电动机的特性。
2 矢量控制系统原理
本文研究设计的控制系统采用了转速和电流的双闭环结构。控制系统结构图如图1 所示。

图1 异步电动机矢量控制系统结构图
通过检测得到交流电机两相定子电流iA和iB,经过两次坐标变换即Clarke 变换和Park 变换后能获取转矩电流分量isq和励磁电流分量isd。速度给定值ω*和速度反馈值ω 相比较,其差值经过速度PI 调节器后得到转矩电流分量的参考值。由于要使磁通为恒定值,所以在程序设定中直接给定励磁电流分量的参考值。励磁电流分量和定子电流分量的误差通过PI 调节器作用获得对应的电压参考值和,并结合由转子磁链观测器得到的转子磁链位置角θc进行Park 逆变换获得电压分量参考值和,从而可以建立SVPWM 算法,对逆变器进行控制。
3 控制系统的软件设计
3.1 主程序
控制系统主程序包括系统及变量初始化、各功能模块初始化、主电路上电控制、电机转子初始位置检测、开T1 下溢中断和CAP 捕获中断、使能PWM等功能。其中系统初始化是对系统时钟、存储器、中断系统和看门狗等进行配置。模块初始化配置的对象则包括:ADC 模块、I/O 模块和事件管理器EV 模块、串口通信模块和通用GPIO 口等。图2 为系统主程序流程框图。

图2 系统主程序流程框图
3.2 EVA 定时器1 下溢中断子程序
EVA 定时器1 下溢中断子程序是本文研究中电机FOC 算法的核心部分。它将执行如下功能:定子相电流采样和A/D 转换;初始化相位;通过正交光电编码器计算转子的实时速度和位置;调节PI 参数;规格化处理采样电流值;坐标变换和逆变换;SVPWM 实现;输出PWM 等。图3 为EVA 定时器1下溢中断服务子程序流程图。
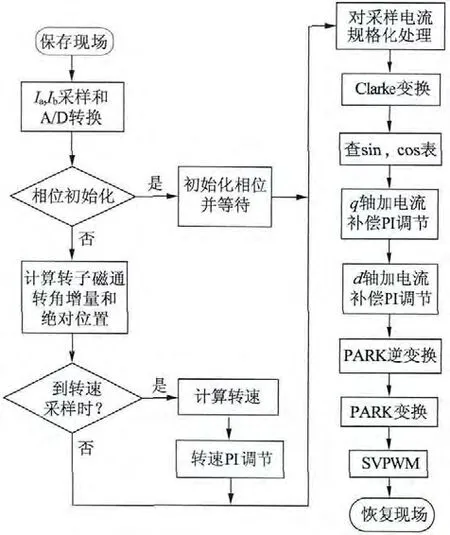
图3 EVA 定时器1 下溢中断服务子程序流程框图
4 实验结果及分析
在软、硬件设计好后,对上述矢量控制方案进行实验验证。实验条件:功率开关管的开关频率为6 kHz,死区时间为5.2 μs;电机为极对数为2 的三相鼠笼型异步电动机,其额定功率3 kW,额定转速1 500 r/min,额定电压380 V,额定电流1.5 A,额定频率50 Hz。软件设定电机转速标幺值0.2,当给三相调压器加上100 V 电压时,电机正常起动,采集了4 组实验波形。图4(a)是在PWM1 引脚口采集到的经过低通滤波器滤波后的波形;图4(b)是通过SVPWM调制后逆变器输出的线电压波形;图4(c)是当电机稳态运行时,电机定子磁链矢量的轨迹;图4(d)是电机的转速波形。
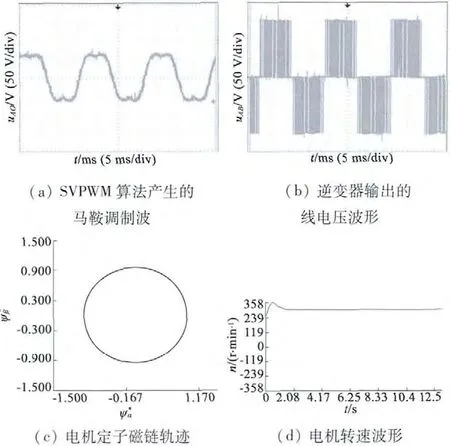
图4 实验波形
实验结果显示,PWM1 引脚口采集到的是马鞍调制波,即A 相相电压波形,它是由SVPWM 算法产生的。在稳态时,电机转速实测值303 r/min,理论值300 r/min。通过采用转子磁场定向控制的方法,利用SVPWM 的调制控制,可以得到一个近似圆的定子磁链轨迹,从而使异步电动机定子输出电流谐波分量小,降低了它的转矩脉动,进而获得了高动态性能。
5 结 语
本文采用TI 的TMS320F2812 作为DSP 控制芯片,同时利用空间矢量脉宽调制技术(SVPWM)输出PWM 波对逆变器进行控制。实验结果验证了控制算法设计的准确性,通过双闭环控制,提高了异步电动机动态响应,增强了系统的抗干扰能力,具有一定的实际应用价值。
[1] 陈伯时,阮毅.电力拖动自动控制系统[M].北京:机械工业出版社,2009.
[2] 丁辉.基于DSP 的三相交流异步电机矢量控制系统[D]. 大连:大连理工大学,2007.
[3] 余胜.基于DSP 的异步电机矢量控制系统设计[J].电子元器件应用,2009(10):14 -16.