新型塔形压电式粘滑直线作动器
2015-03-12陈乾伟鞠全勇黄卫清时运来
陈乾伟,鞠全勇,黄卫清,时运来
(1.金陵科技学院,南京211169;2.南京航空航天大学,南京210016)
0 引 言
随着超精密加工与测量仪器、半导体技术、微装配和生物医学工程微操作机器人等现代高新技术的飞速发展,对直线驱动技术提出了许多新的要求,如大行程、高速度和纳米级定位精度、功率密度大、无电磁干扰等。由于压电作动器在体积、精度、响应速度、输出力及功率密度等方面具有明显的综合优势,因此满足上述要求的关键是研发大行程、高速度和纳米级定位精度的压电直线作动器[1-6]。
众所周知,大行程、高速度与高定位精度是矛盾的,但是压电式粘滑作动器却能够兼顾这几方面的性能:它具有若干厘米以上的行程以及若干mm/s速度的同时,还具有小于5 nm 的超高定位精度;此外,它结构简单、紧凑并能够提供较高的运动刚度。因此,压电式粘滑作动器特别适用于诸如微操作之类的高技术领域[7-8]。
基于压电式粘滑作动器的优异性能以及在现代高新技术领域的广泛应用前景,我们研发了一种塔形压电式粘滑直线作动器。
1 作动器设计
1.1 塔形定子设计
由于“塔形”结构具有“聚焦”能量的优点,因此设计的电机定子采用了如图1 所示的塔形结构。图1 的塔形定子含有两个正方形截面的柱形结构,这两个柱形结构在端部被锥形的驱动足联接,两个柱形结构的外表面粘贴有4 片压电陶瓷。
要构造粘滑作动器,需要定子在锯齿波驱动信号的激励下,定子驱动足端部产生平行于动子运动方向的非对称切向振动。具体到本文研究的塔形结构定子,选择如图2 所示的非共振状态下强迫弯曲振动来产生所需要的非对称切向振动。
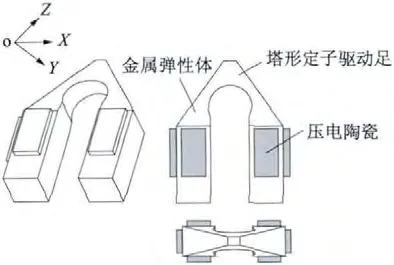
图1 塔形定子结构示意图
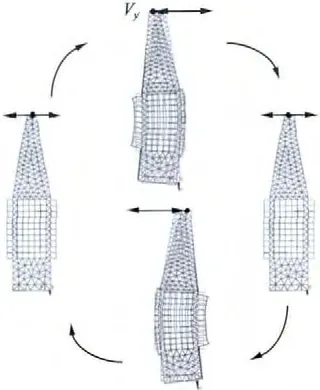
图2 塔形定子切向非共振强迫振动的振型
为了实现图2 的非共振强迫振动的振型,设计了如图3 所示的压电陶瓷片的极化布置方案。整个塔形定子共用4 片压电陶瓷,沿厚度方向极化,全部4 片压电陶瓷构成A 相,通过对A 相施加锯齿波驱动信号就可以得到所需的切向振动。
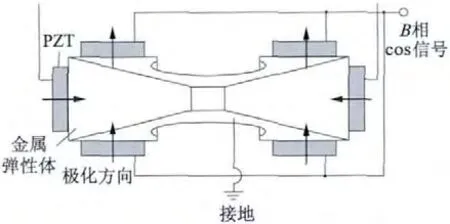
图3 压电陶瓷片的极化布置方案图
利用此切向振动构成粘滑作动器的工作原理如图4 所示。当给定子的A 相施加先缓慢上升再快速下降的周期性连续锯齿波信号,定子驱动足将产生缓慢正向运动快速反向运动的非对称振动,驱使动子正向运行;当锯齿波驱动信号反相,定子驱动足将相应产生反相的非对称振动,驱使动子反向运行。

图4 塔形定子粘滑运动机理
根据上述设计方案制作的塔形定子样机如图5所示。塔形定子尺寸20 mm×6 mm×30 mm,质量20 g。
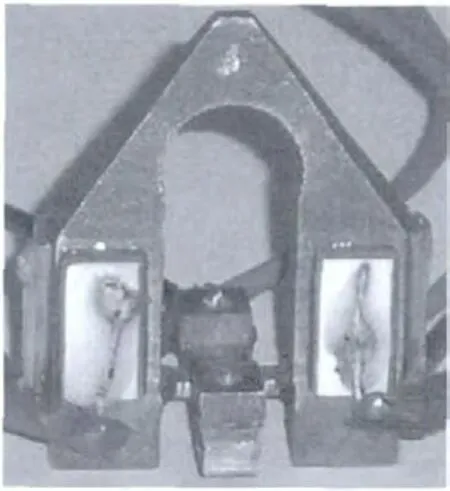
图5 塔形定子样机
1.2 作动器整体结构设计
塔形定子制作好之后,还需要完成以下工作才能构成塔形作动器。设计并制作相应的动子;将定子与动子安装在共同的基座上;选择合适的预压力使定子与动子相互接触。这些工作就是作动器的整体结构设计,整体结构设计得合理与否,将严重影响到作动器的运行稳定性和定位精度。
由于一般采用购买的商品导轨或平台作为直线作动器的动子,因此在作动器整体结构设计中,主要考虑两个问题:一是定子与动子的安装;二是定子与动子之间预压力的施加。
在参考Nanomotion 电机整体结构[9]的基础上,设计了如图6 所示的塔形定子驱动的基于三滚子结构的一维运动平台,运动平台行程30 mm。

图6 塔形定子驱动的一维运动平台
这种结构主要由三个滚子(轴承)、滑板、铰链、基座、预压力加载机构、塔形定子及一维运动平台构成。由于采用了三滚子结构,再加上侧向的螺栓和蝶簧的作用,在消除定子安装侧隙的同时,使得定子安装夹持的切向位移刚度≫法向位移刚度,非常有利于作动器的稳定运行和精密定位[10]。
2 实 验
2.1 模态实验
采用德国Polytec 公司生产的PSV300F - B 型高频扫描激光测振系统对塔形定子进行模态实验。实验结果如图7 和表1 所示。
从实验结果可知:
(1)在0 ~13 000 Hz 的频率范围内,弯振模态幅频曲线没有共振峰值,其弯曲振动属于非共振强迫振动;
(2)在0 ~13 000 Hz 的频率范围内,其非共振强迫振动振型与设计所选择的振型一致;
(3)在0 ~13 000 Hz 频率范围内,并且在峰峰值80 V 电压定频激励下,测得5 个典型采样点的非共振强迫弯曲振动幅值为30 ~50 nm,验证了stick-slip principle 运行的可行性。
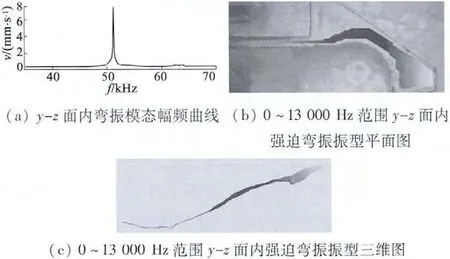
图7 塔形定子y-z 面内非共振强迫弯曲振动的振型

表1 80 V 电压塔形定子非共振强迫振动下不同激励频率对应的驱动足切向振幅
2.2 机械特性实验
塔形作动器驱动信号平台由信号发生器和功率放大器构成。实验时,信号发生器发出单相锯齿波电压信号,经功率放大器放大后,输出驱动塔形作动器。
图8 为塔形作动器测试系统,它主要由图6 的一维运动平台和Renishaw XL-80 激光干涉仪两部分构成,用来测试塔形作动器的性能指标。激光干涉仪系统精度为±0.5×10-6,激光稳频精度为±0.05×10-6,测量范围0 ~80 m,分辨率为1 nm,最大测量速度为4 m/s,最高采样频率为50 kHz。测试实验在10万等级洁净房环境中进行。

图8 塔形作动器测试系统
图9 是在锯齿波激励信号的峰峰值电压400 V、预压力为6 N 条件下塔形作动器的机械特性曲线。由图9 中可以看出:(1)作动器稳定运行的频域很宽,在1 ~14 000 Hz 范围内,都可以采用锯齿波对作动器进行正反向驱动,在8 000 Hz 的驱动效果最好;(2)在1 ~8 000 Hz 范围内,作动器的运行速度随着驱动信号频率的升高而单调上升;在8 000~14 000 Hz 范围内,作动器的运行速度随着驱动信号频率的升高而单调下降;(3)驱动频率在8 000 Hz时作动器速度最大,为1.2 mm/s;在1 Hz 时作动器速度最小,为35 nm/s。

图9 塔形作动器机械特性曲线
3 结 语
本文研发了一种塔形压电式粘滑直线作动器。该作动器由塔形定子和动子构成,当输入锯齿波激励信号时,塔形定子利用y-z 面内强迫弯曲振动来激发定子驱动足产生非对称切向振动,从而驱动动子正反向运动。
经测试,在锯齿波激励信号的峰峰值电压400 V、预压力6 N 的条件下驱动频率在1 ~14 000 Hz范围内,该作动器能够稳定运行;驱动频率在8 000 Hz 时作动器速度最大,为1.2 mm/s;驱动频率在1 Hz 时作动器速度最小,为35 nm/s。
[1] ZHAO Chun -sheng. Ultrasonic motors technologies and applications[M].Beijing:Science Press,2011:1 -19.
[2] UEHA S,TOMIKAWA Y. Ultrasonic motors theory and applications[M].Oxford:Oxford University Press,1993:160 -190.
[3] 陈乾伟,时运来,黄卫清.新型塔形直线超声电机[J]. 中国电机工程学报,2010,36(30):27 -32.
[4] 陈乾伟,黄卫清.单相斜轨塔形直线超声电机设计与实验[J].振动工程学报,2011,24(3):260 -267.
[5] 陈乾伟,黄卫清.塔形超声电机的突变结构弹性支撑[J].振动与冲击,2012,31(24):74 -81.
[6] SHI Yun-lai,ZHAO Chun-sheng.A new standing-wave-type linear ultrasonic motor based on in-plane modes[J].Ultrasonics,2011,51:397 -404.
[7] BREGUET J M,CLAVEL R.Stick and slip actuators:design,control,performances and applications[J].IEEE International Symposium on Micromechatronics and Human Science,1998:89 -95.
[8] HUNNARD N B,CULPEPPER M L,HOWELL L L. Actuators for Micropositioners and Nanopositioners[J]. Transactions of the ASME,2006,59(11):324 -334.
[9] WALDBRONN W W. Piezoelectric drive,especially a holding frame,a friction element and a circuit configuration:US,6979934B1[P].2005 -12 -27.
[10] 于会民,王寅,陈乾伟,等. 三滚子结构夹持的直线型超声电机[J].机械科学与技术,2012,31(2):250 -254.