一种新型低功耗的永磁同步冷却风机系统
2015-03-12李凤军李庚益章跃进
李凤军,崔 巍,李庚益,廖 憬,章跃进
(上海大学,上海200072)
0 引 言
永磁同步电动机由于其具有体积小、效率高、转矩脉动小等优点,被广泛应用于电动汽车、数控机床、机器人等动态响应快、调速范围广、定位精度高的高性能传动系统中[1-2]。传统的正弦波控制方式是在永磁转子旁安装用来检测转子位置信号的光电编码器或者旋转变压器等高精度传感器[3]。但是这种传感器有着成本高、易受外界环境干扰等缺点,为了降低系统的成本以及提高系统的可靠性,人们研究了许多无传感器位置估计算法[4-5],但是这些位置估计算法在电机起动和低速时性能不佳,无法满足汽车应用对高可靠性能的要求。
考虑到冷却风机的应用特点以及汽车工业对可靠性、成本以及运行效率等要求,开关霍尔传感器具有价格便宜、运行可靠的优势在汽车风机的应用上显得尤为突出。本文针对汽车风机冷却应用,实现了一种新型低功耗的永磁同步风机系统。在系统中,采用三个开关霍尔元件来检测转子位置信号,控制器根据当前位置信号算出转子角度θ,该角度θ提供给能实现低功耗的SVPWM 控制算法中,产生在一个周期内2/3 周期是马鞍波、1/3 周期是低电平的新型马鞍波来驱动功率开关器件,利用这种同时只有两相导通的调制方式,大大地减小了功率管的开关损耗,提高了电压利用率,从而提高了风机运行的效率,形成全数字的永磁同步电动机控制系统。
1 开关损耗最小的SVPWM 工作原理
传统的SVPWM 调制方式控制逆变器开关管时在同一时刻有三个开关管导通,共有8 种开关组合状态,其中零矢量V0,V7交替出现,这也就是常规的7 段式SVPWM 调制。在本文中,如图1 所示,该控制系统采用的是在同一时刻只有两相开关导通、开关损耗较小的新型SVPWM 调制方式。该调制方式每一相有1/3 周期(120°)器件没有开关,零矢量采用单一的V0,因此与常规的SVPWM 相比,开关损耗降低33%。其相电压UX公式如下:


图1 开关损耗最小的新型调制信号
构造不连续脉宽调制的数学模型如图2 所示。其中x =ωct,y =ωt,ωc为采样频率,ω 为调制波频率。z方向正交于xy平面,调制模型可表示为z =F(x,y),在阴影范围内z=0,其余z =Ud,Ud为变流器直流侧电压。
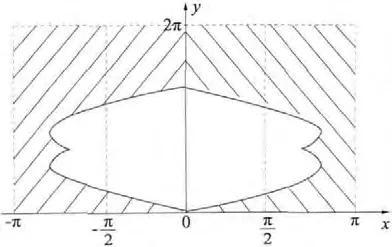
图2 开关损耗最小SVPWM 数学模型
取双重傅里叶变换,有:

其复数傅里叶级数系数:
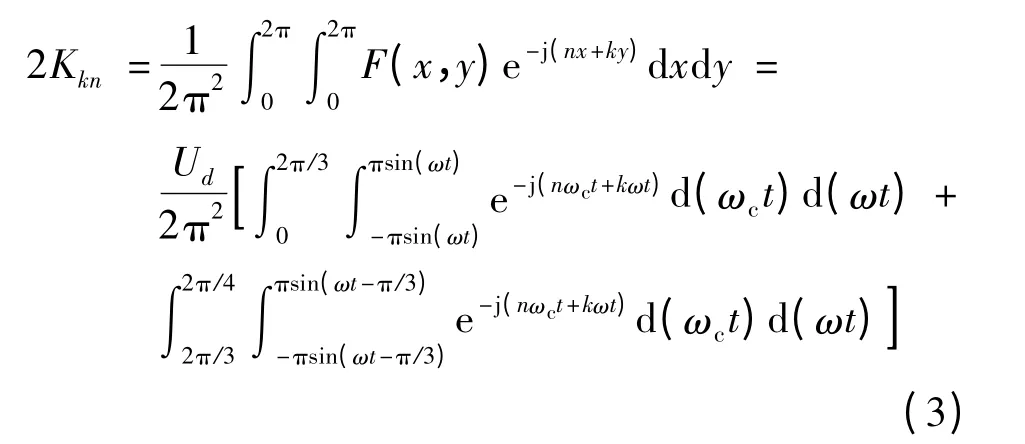
考虑线电压情况有:


化简式(4)并结合式(5)最终有:


以下为采用功率损耗最小SVPWM 调制的永磁同步电动机矢量控制中相电流及其分析的仿真结果。从图3、图4 中可以看出,三相电流正弦度很好,谐波含量相很少,不足10%。

图3 负载为2 N 时电机三相相电流波形

图4 A 相相电流FFT分析结果
2 基于离散霍尔信号的转子位置估计
该系统的软件算法中最关键的是转子角度的估计,电机旋转时,霍尔信号的输出与电机反电动势的对应关系如图5 所示。由霍尔传感器提供给控制芯片的是三相相位差互为120°的方波信号,在360°的电周期内一共有6 个跳变沿(三个上升沿、三个下降沿),只能提供给单片机6 个互差60°的准确转子位置,这不能满足用于生成开关损耗最小的新型马鞍波的角度精度需求[6]。

图5 霍尔信号与反电动势对应关系
利用低分辨率霍尔传感器给出的位置信号来估计当前转子的位置,可以用一个定时器来完成。当每相开关霍尔信号的跳变沿产生时就进入霍尔中断,根据当前的三相霍尔状态,可以明确地知道当前的转子位置θk:

由于电机的机械时间常数远大于电气时间常数,所以电机在没有很快加速或者减速时可以认为电机转过当前的60°所用时间Tk与前一个60°所用时间Tk-1是一样的。用一个定时中断记下在Tk-1时间内中断进入的次数N,那么在每次中断中,角度增加的大小为Δθ =60°/N,中断次数n 就加1。所以任意时刻的转子角度θ:

式中:n 代表此时定时中断来临的次数;θ 可以用于生成开关损耗最小调制信号所需要的角度变量。利用这种位置估计算法完全可以取代成本较高的光电编码器,达到减小系统成本的目的。
3 控制系统实验结果验证
本文在结合电机参数和具体电路结构的基础上进行了三个霍尔传感器的永磁同步电动机正弦波驱动控制实验。实验中冷却风机的具体参数如表1 所示。
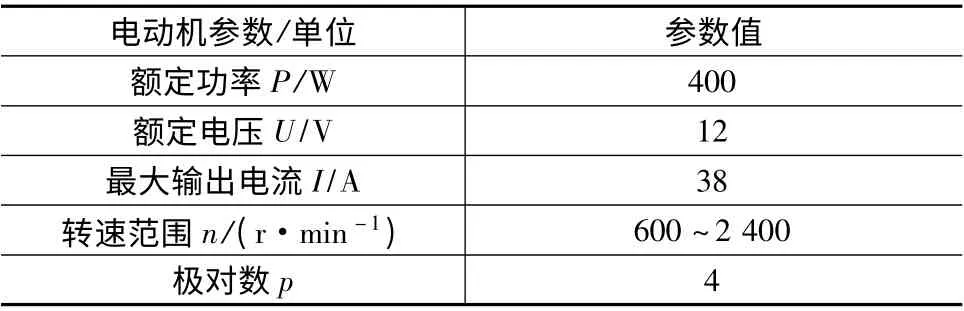
表1 实验用风机参数表

图6 控制系统硬件结构图
对于电压型逆变器来说,相电压的相位可以由控制器决定,控制器通过霍尔传感器检测电机转子位置的信号产生相应的PWM 驱动信号。考虑到绕组上寄生电感的影响,相电压超前于相电流一个角度,由于只有电机相电流与反电动势同相位时电机才能输出最大转矩,因此通过调整相电压与反电动势的夹角就可以实现相电流与反电动势同相位,从而输出最大转矩[7]。
在图7 中通过软件算法人为地控制相电压超前于反电动势一个角度,这样可以使相电流与反电动势基本保持同相关系。当正弦波驱动电机时若调制比不变,则电机的端电压U 幅值不变。当电机负载变化时,端电压U与反电动势的相位差以及U的幅

图7 霍尔信号、反电动势、相电压波形截图
值变化固定不变,变化的只是电机的反电动势E、电机的相电流I、以及E 与I 之间的相位角。
图8 是在额定负载的情况下A 相相电压跟A 相相电流的相位关系波形,比较图7 与图8 可得,在额定负载的情况下,基本可以实现相电流与反电动势同相的目的,从而有利于提高电机的转速,提高电机的运行效率。

图8 相电压与相电流的波形截图
当电机拖动额定负载时,所得相电流波形及其谐波分析如图9 所示,此时相电流基本呈正弦波形状,其谐波含量不到10%,与仿真结果基本一致。

图9 额定负载时相电流波形及谐波分析
4 结 语
本文针对汽车引擎冷却风机的应用,实现了一种采用三个霍尔元件的永磁同步电动机正弦波控制的方法。通过采用同一时刻只有两相开关管导通的新型SVPWM 调制方式,能明显减少开关器件的功率损耗,提高直流电压利用率。结合了方波控制与正弦波控制的优点。最后实验结果验证了此方案的可行性与可靠性,具有一定的使用价值。
[1] 王小荷.电动冷却风扇在客车上的应用[J].客车技术与研究,2008,30(5):27 -29.
[2] 毛维杰,沈云宝.汽车空调无刷直流风机的驱动与保护[J].汽车电器,1997(4):8 -10.
[3] 苏世栋.正弦波驱动下无刷直流电机机械特性研究[J]. 微电机,2012,45(3):21 -24.
[4] JANG Ji-Hoon,HA Jung-Ik,OHTO M,et al.Analysis of permanent magnet machine for sensorless control based on high frequency dignal injection[J]. IEEE Transactions on Industry Applications,2004,40(6):1595 -1604.
[5] 崔巍,孙杰.一种基于无位置传感器控制的汽车发动机冷却直流无刷风机系统[J].微特电机,2009,37(5):13 -18.
[6] 房森林,章跃进.基于离散位置信号的永磁同步电动机空间矢量控制[J].微特电机,2010,38(7):51 -54.
[7] 黄腾云,姜淑忠. 采用霍尔传感器的PMSM 低成本控制系统[J].微特电机,2012,40(1):10 -14.