四旋翼无人机在柑橘园巡检系统中的应用
2015-03-11ApplicationofQuadrotorUAVintheInspectionSystemofCitrusOrchard
Application of Quadrotor UAV in the Inspection System of Citrus Orchard
高 绪 谢菊芳 胡 东 邱善生
(西南大学工程技术学院,重庆 400715)
四旋翼无人机在柑橘园巡检系统中的应用
Application of Quadrotor UAV in the Inspection System of Citrus Orchard
高绪谢菊芳胡东邱善生
(西南大学工程技术学院,重庆400715)
摘要:针对现阶段西南地区大面积柑橘园巡检的应用需求,为了提高柑橘园巡检管理效率,降低劳力,提出了一种巡检系统。系统利用四旋翼无人机为载体,搭载视频采集装置进行航拍巡视、搜索、采集柑橘园区的视频图像资料,完成巡检任务。系统上位机软件在Visual studio 2013环境下开发,系统硬件为四旋翼无人机搭载拍摄设备。通过上位机软件,系统实现了对柑橘园巡检情况的实时观看、定点捕捉以及对四旋翼无人机飞行姿态、高度和拍摄角度的控制。测试表明,该巡检系统操作简单,提高了对柑橘园的巡检效率,节省了劳力,且系统运行稳定、可靠,适用于西南地区大中型柑橘园区的巡检工作。
关键词:四旋翼无人机VS2013姿态控制视频采集巡检系统
Abstract:Aiming at the application demands for inspecting large citrus orchards in southwest region, in order to improve the management efficiency and reduce the labor input, the strategy using quadrotor UAV as the carrier is proposed. The UAV is equipped with video collection device for aerial shooting, inspecting, searching, and collecting video images of the citrus orchard, thus completing the tasks of inspection. The software of host computer is developed under Visual Studio 2013 environment; the hardware of system is composed of the shooting equipment on the UAV. Through the software of host computer, the functions of real time watching, site capturing, and controlling the flight attitude, height, shooting angle of quadrotor UAV can be implemented. The tests show that the operation of system is simple; the system runs stably and reliably, it enhances the efficiency of inspection and saves labor, so the system is suitable for the inspection of large and medium sized citrus orchards in southwest region of China.
Keywords:Quadrotor UAVVS2013Attitude controlVideo captureInspection system
0引言
近年来,我国已经跃居为柑橘世界的第一大国,并将长期保持领先地位[1]。其中,重庆、江西、湖北、湖南和四川5省的柑橘种植产量占全国总产量的50%左右,柑橘产业已经成为我国南方主产区农村经济的一大支柱产业,为促进农民增收、扩大城乡居民就业和改善生态环境作出了积极贡献[2]。但是我国柑橘生产的土地生产率低于世界平均水平,具体表现为单产水平较低,其中一个最主要的原因就是柑橘园生产经营管理方式粗放[3]。
目前,西南地区柑橘园区巡检方式主要依靠人工巡检。2008年,湖南、湖北、重庆等西南5省市的柑橘园区种植面积已经达到120万km2,占全国柑橘园区总面积的62%[2]。随着种植园区的集中化、规模化以及西南地区柑橘园区种植自然条件的制约,人工对柑橘园区进行巡检存在着诸多问题。由于利用智能巡检装置进行巡视、检查具有工作效率高、省时节能的效益,因此该装置在各个巡检领域得到广泛应用。国内电力部门在智能巡检方面进行了优化设计,设计了变电站、输电线路、大中型电力器件等智能巡检装置[4-6],其中输电线路巡检方面开发了一些智能化巡检无人机运动控制系统或装置[7-9]。但是西南地区大部分柑橘园地处偏远山区,无电力设施。因成本、供电限制、不易操作等原因[10],不能将现有的智能巡检装置照搬到柑橘园区的巡检任务中。
为此,本文设计了一套基于四旋翼无人机的柑橘园巡检系统,其中包括四旋翼无人机的硬件系统及上位机软件系统。用户只需要在上位机软件界面上发送控制指令,就可以对四旋翼无人机的姿态、高度和拍摄角度进行控制。该系统可以对柑橘园区的灌溉系统、园区鸟害、杂草覆盖、人工破坏等园区状况进行巡检,操作简单方便,巡检效率高,果农可以针对巡检情况做出及时处理。
1巡检系统结构
四旋翼无人机巡检系统结构如图1所示。
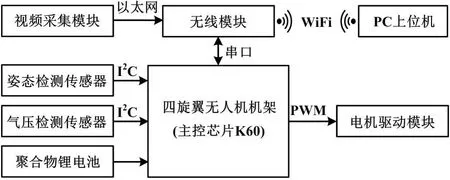
图1 四旋翼无人机巡检系统结构图
四旋翼无人机巡检系统由四旋翼无人机机架、姿态检测模块、气压检测模块、电机驱动模块、视频采集模块、聚合物锂电池、无线模块和PC上位机组成。系统通过PC上位机发送控制指令,控制无人机的飞行姿态,并且通过视频采集模块,采集视频数据传送到上位机,在上位机软件界面上显示无人机姿态数据及其巡检视频的实时预览或保存。
2系统下位机设计
2.1 下位机硬件设计
四旋翼无人机巡检系统硬件设计部分主要分成无人机机体及其动力系统、传感器数据采集系统、巡检设备控制系统、无线通信系统4个部分。
2.1.1机体及其动力系统
四旋翼无人机机体采用X型无人机架,带有4片正反桨叶的旋翼。与传统的单旋翼直升机不同,四旋翼无人机可以通过自身正反旋翼上产生的气动力抵消偏航扭矩。通过对4个旋翼电机的转速控制,实现对四旋翼无人机定点悬停、垂直升降等飞行姿态的控制。四旋翼无人机机体配备U型支架,给摄像装置留有足够的安装空间,保证无人机平稳着落。无人机机架采用碳纤维材料,动力系统由新西达XXD2208/1800KV无刷直流电机、电子调速器、9.8英寸(1英寸=25.4 mm)桨叶组成。为了能使无人机完成长时巡检任务,动力系统配备高性能的锂聚合物电池,充分满足电机的转速要求。
2.1.2传感器数据采集系统
传感器数据采集系统主要分成姿态检测传感器和气压检测传感器2部分,两者与主控芯片间均采用I2C通信方式。姿态检测传感器采用MPU-9150,该模块集成了三轴加速度计、三轴陀螺仪和三轴电子罗盘,满足无人机姿态解算要求。气压检测传感器采用MS5611。该模块通过检测无人机当前状态的气压值,通过气压值与海拔高度之间的转换关系实现对无人机飞行高度的测量。
2.1.3巡检设备控制系统
巡检设备控制系统主要由舵机控制支架和天视通TH38R视频采集模块2部分组成。天视通TH38R视频采集模块安装在舵机控制支架上,通过减震装置悬挂在无人机机体上。舵机连接旋转支架可以实现180°方向旋转,在四旋翼无人机俯仰、偏航等姿态变化时,对柑橘园区环境进行多角度拍摄。针对不同的巡检地点图像质量要求不同,园区工作人员可以在上位机界面上对画面成像的主流码进行选择(分成三个层次1 280×720、640×360和320×180),满足不同巡检视频图像的采集要求。
2.1.4无线通信系统
柑橘园区巡检系统的主要目的是采集园区内灌溉系统、园区鸟害、低温冻害、杂草覆盖等园区情况的影像资料,为人工管理柑橘园区提供前期数据。考虑获取数据的时效性、可靠性和安全性的要求,采用无线通信模块HLK-RM04配备上位机软件,实现采集视频图像的实时预览、飞行姿态控制和摄像装置拍摄角度的调节。
无线控制模块是连接上位机软件与下位机之间数据通信的桥梁,负责将上位机的控制指令传送给下位机控制系统和将巡检园区拍摄的视频回传到上位机界面。系统采用海陵电子公司生产的HLK-RM04无线模块。该模块能够实现串口、以太网和WiFi这3个接口间任意透明传输;通过外接高增益无线天线,保证无线信号远距离传输。主控芯片和天视通TH38R视频采集模块分别通过UART和以太网的LAN接口与无线模块进行握手连接,无线模块通过WiFi与上位机软件进行数据通信。
无线模块工作方式如图2所示。

图2 无线模块工作方式连接图
2.2 下位机软件设计
四旋翼无人机巡检系统的下位机软件设计,首先对MCU时钟与内部存储空间进行初始化;然后定时读取无线控制信号数据,将所获得的无线控制信号和传感器信号做比较,计算出偏差;最后通过PID控制器得到电机的控制量。下位机软件设计主程序流程图如图3所示。最主要的流程就是实现对四旋翼无人机巡检系统的数据融合和姿态解算。

图3 下位机软件主程序流程图
2.2.1数据融合
在惯性测量系统中,加速度测量是重力方向,在没有外力的情况下能够准确输出横滚/偏航两轴的姿态角,但是MEMS技术检测惯性力和重力本质不同,所以加速度传感器的输出将不准确[11]。陀螺仪输出的角速度是瞬间输出量,需要对角速度积分才能得到角度值,所以传感器的数据积分累积误差会越来越大。因此,需要用加速度传感器对陀螺仪的数据进行不断的修正,融合两者的姿态数据才能准确反映当前无人机的飞行姿态。
四旋翼无人机姿态解算采用互补滤波的方法对数据进行融合。互补滤波融合算法以加速度和角速度的测量值作为输入,将加速度数据经过低通滤波器,滤除短期内加速度数据的波动量。陀螺仪测量得到的角速度是瞬时值,对其积分得到的角度变化量需要经过高通滤波器处理掉高频分量[12]。互补滤波融合算法的系统框图如图4所示。
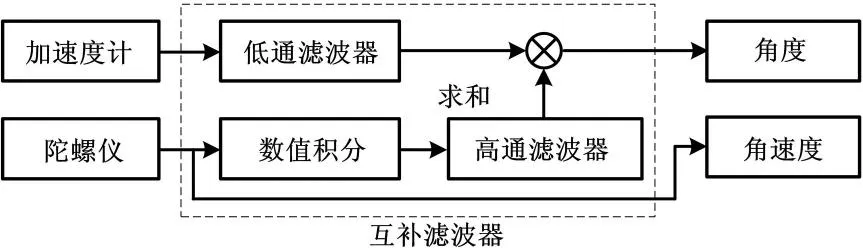
图4 互补滤波融合算法系统框图
2.2.2姿态解算
采用姿态检测传感器MPU9150采集的三轴陀螺仪、三轴加速度计和三轴磁力计的数据如图5所示。
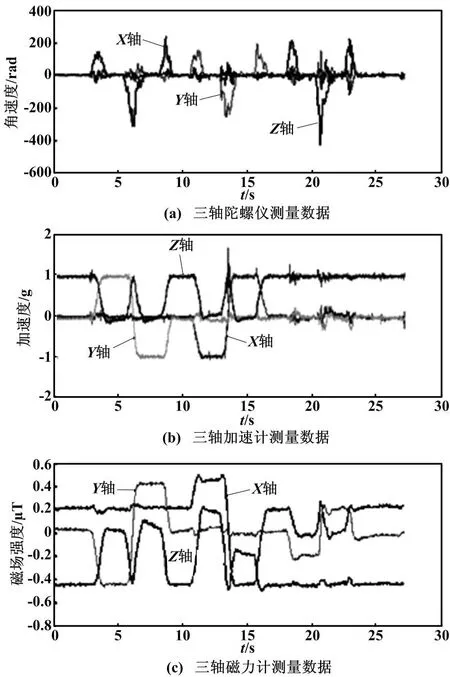
图5 姿态检测模块测量数据
姿态解算是整个下位机软件控制系统的核心。四旋翼无人机的姿态主要由俯仰、横滚和偏航3个角度来确定。空间中描述四旋翼无人机的飞行姿态需要定义参考坐标系和载体坐标系,四旋翼无人机在运动的过程中,参考坐标系保持不变,载体坐标系相对于参考坐标系可以通过多次旋转运动得到[13]。经过互补滤波之后输出的角度和角速度值,通过姿态解算算法得到控制无人机的偏航、横滚和俯仰3个角度值。
姿态检测传感器采集到的姿态数据都是在载体坐标系中。在四旋翼无人机在进行姿态解算时,需要将载体坐标系下测的数据转换到导航坐标系下,然后再进行姿态解算,本文利用方向余弦阵完成载体坐标系到导航坐标系的转换。方向余弦矩阵如式(1)所示。通过方向余弦矩阵可以得到3个姿态角即偏航角(ψ)、俯仰角(φ)和横滚角(θ),如式(2)所示[14-15]。
上位机软件通过无线信号发送无人机期待的飞行姿态控制信号,同时读取当前姿态传感器数据;经过互补滤波,解算出当前无人机姿态,计算期待姿态和当前姿态的差值。通过PID控制器计算出电机控制量,以PWM占空比形式输出,驱动旋翼电机,最终完成无人机姿态控制。
(1)
(2)
3系统上位机软件设计
系统上位机软件与下位机之间通过无线通信模块HLK-RM04进行数据通信。上位机软件是在VS2013的C#开发环境下设计的窗体应用程序,软件界面主要由登录端、无人机控制端和数据端3部分组成。
登录端主要用来连接无线模块及其摄像装置,主机与客户端要获得连接通信,要求两者都必须在同一个无线网络中。在程序设计中,创建一个接收“Socket”,用来与主机无线模块进行通信,通过“Receive”函数接收指定IP地址和端口号的主机传送来的数据,调用“Socket”的“Send”方法,向主机无线模块发送控制指令[16];控制端主要是对四旋翼无人机的飞行姿态进行控制和对视频采集模块的镜头角度进行调节。四旋翼无人机姿态是由界面中的“上、下、左旋、右旋、前、后、左、右”几个按键控制;数据端是用来显示发送出去或接收到的数据,发送区显示上位机准备发送给下位机的命令或信息,接收区显示下位机返回的信息。上位机界面添加了一个“PictureBox”控件,将其“Sizemode”属性设置成“Autosize”,用来显示视频模块采集到的视频数据。程序中调用了“EmguCV”函数,将摄像头采集的视频在界面上全屏显示[17]。
4巡检系统测试
4.1 通信测试
打开无线模块供电开关,上位机通过无线模块的无线网络“HLK-RM04”进行数据通信,在上位机软件界面上的登录端,对下位机IP地址进行设置,设置其IP地址为“196.168.16.254”,端口号为“8080”,点击连接,实现上位机软件与下位机连接通信。同样通过登录端,将摄像头与无线模块通信的IP地址设为“196.168.16.123”,端口号设为“8091”,实现摄像头与上位机软件间数据通信。连接成功后,在发送区会显示“连接成功”的信息提示。2013年9月,在西南大学工程技术学院机器人实验室对四旋翼无人机巡检系统进行上位机软件与无线模块、摄像装置进行通信测试,并且对视频图像的采集进行测试。
4.2 姿态测试
登录端与下位机软件间握手连接成功后,在控制端上发送控制指令,通过下位机软件对数据进行处理,转换成对4个旋翼电机转速的控制,最终完成无人机飞行姿态改变。通过控制端软件界面上设置的控制指令,可以实现四旋翼无人机静止悬停、偏航运动、垂直升降等飞行姿态的控制。
以四旋翼无人机飞行高度控制为例,在登录端与下位机无线模块握手连接成功后,在上位机界面的控制端发送“上”指令,将数据发送到下位机主控芯片,改变PWM信号周期,控制四轴旋翼电机转速,提升升力,从而改变四旋翼无人机的高度。
2013年10月,在西南大学第四运动场对四旋翼无人机进行静止悬停、偏航运动、垂直升降等飞行姿态控制,测试结果如图6所示。

图6 四旋翼无人机飞行姿态测试图
4.3 巡检测试
通过上位机软件界面上的登录端,设置摄像头的IP地址与端口号,保证摄像头与上位机软件间数据通信。针对巡检园区拍摄图像的质量要求,选择图像输出的主流码和拍摄图像文件的保存路径,然后点击客户端上的“播放”按钮,实现对柑橘园区巡检视频的采集;点击“停止”按钮,实现柑橘园区巡检视频图像采集文件的保存。
5系统运行效果
2014年7月1日至15日,在重庆市北碚区歇马镇柑橘园种植基地进行实地测试,对四旋翼无人机巡检系统进行通信、巡检时间以及巡检功能的测试。试验结果如下。
① 系统在通信测试上功能正常,主控芯片( K60DN512 )和视频采集模块( TH38R )能够分别通过串口和以太网口,实现与无线模块之间数据通信,无线模块与上位机软件间通过无线网络,实现握手连接。
② 测试的柑橘园区种植面积较大,人工平均对柑橘园区巡检一次需要3 h。通过15天测试,四旋翼无人机巡检系统对柑橘园区平均巡检一次需要0.5 h,巡检时间上基本满足预期设计目标。
③ 在15天测试期内,重庆的天气一直是高温少雨。每天针对柑橘园区巡检2次,柑橘园区巡检总次数30次,15天测试期内发现柑橘园区异常情况6次,在此期间四旋翼无人机巡检系统出现了2次机械故障,故障率在6.7%左右。
通过巡检视频图像数据,园区工作人员对柑橘园区异常情况进行准确定位,及时处理。四旋翼无人机对柑橘园区巡检测试情况如图7所示。

图7 四旋翼无人机巡检系统测试图
6结束语
柑橘产业是我国水果产业的重要组成部分,直接关系到我国水果产业的经济利益和安危,利用各种新方法和新技术来满足柑橘园区的巡检需求是一个重要的研究方向。四旋翼无人机以其搭载巡检设备体积小、飞行灵活和通信可靠的优势,具有广阔的应用前景。本文设计了四旋翼无人机巡检系统,解决了西南地区大面积柑橘园区巡检困难、劳力输出大的问题。系统还可以广泛应用于抗灾救援、军事侦查等各个领域。
参考文献
[1] 冉德森,周国斌.我国柑橘产业发展前景预测[J].湖北植保,2009(5):43-44.
[2] 张玉,赵玉,祁春节,等.中国柑橘产业可持续发展制约因素与对策[J].中国热带农业,2007(5):10-11.
[3] 宋自奋,张玉,祁春节.我国柑橘市场竞争力比较分析[J].安徽农业科学,2008,36(26):11602-11603,11610.
[4] 周立辉,张永生,孙勇,等.智能变电站巡检机器人研制与应用[J].电力系统自动化,2011,35(19):85-88,96.
[5] 于德明,郭昕阳,陈方东,等.500 kV输电线路线上监测系统应用[J].中国电力,2009,42(5):53-56.
[6] 吴功平,曹珩,皮渊,等.高压多分裂输电线路自主巡检机器人及其应用[J].武汉大学学报:工学版,2012,45(1):96-102.
[7] 曹平军,杨昌茂,王晓峰,等.飞行体姿态测量误差校正方法研究[J].自动化仪表,2014,35(2):20-23.
[8] 郑浩,王鹰,秦嘉喜,等.无人机巡线车的研究及设计[J].自动化与仪器仪表,2013(3):72-74.
[9] 王振华,黄宵宁,梁焜,等.基于四旋翼无人机的输电线路巡检系统研究[J].中国电力,2012,45(10):59-62.
[10]李加念,洪添胜,卢加纳,等.柑橘园低能耗滴灌控制器[J].农业工程学报,2011,27(7):134-139.
[11]谭广超.四轴飞行器姿态控制系统的设计与实现[D].大连:大连理工大学,2013.
[12]Xiong Jingjing,Zheng Enhui.Position and attitude tracking control for a quadrotor UAV[J].ISA Transactions,2014(53):725-731.
[13]刘杰.四轴飞行器研究与设计[D].南京:南京邮电大学,2013.
[14]梁延德,程敏,何福本,等.基于互补滤波器的四旋翼飞行器姿态解算[J].传感器与微系统,20011,30(11):56-58.
[15]Xu Yan,Luo Delin,Xian Ning,et al.Pose estimation for UAV aerial refueling with serious turbulences based on extended Kalman filter[J].OPTIK,2014(125):3102-3106.
[16]黄华,仲元昌.TTS在智能公交报站系统中的应用[J].自动化仪表,2012,33(8):24-26.
[17]欧阳和平,阳晖.VS环境下假设检验Web应用程序开发[J].计算机与现代化,2012(10):187-190.
中图分类号:TH7;TP249
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201507008
国家级大学生创新创业训练基金资助项目(编号:201310635050)。
修改稿收到日期:2015-01-08。
第一作者高绪(1991-),男,现为西南大学农业电气化与自动化专业在读硕士研究生;主要从事农业电气化与自动化理论与应用研究。
