陀螺稳定平台姿态控制精度评定试验方法
2015-03-11郭士荦许江宁
郭士荦 许江宁 郭 斌
(海军工程大学导航工程系 武汉 430033)
陀螺稳定平台姿态控制精度评定试验方法
郭士荦 许江宁 郭 斌
(海军工程大学导航工程系 武汉 430033)
陀螺稳定平台姿态精度评估是稳定平台姿态控制的关键技术之一。姿态控制精度的评定不仅仅取决于测量系统硬件设备的性能和精度,还与所采用的精度评定试验方法有关。针对大负载稳定平台姿态控制精度评估问题,论文对陀螺稳定平台误差机制进行了分析,设计了基于激光传播特性的高精度光学测姿系统及相应试验方案,对陀螺稳定平台静态、动态环境下的姿态控制精度进行了评定试验,对试验结果进行了分析。试验结果表明,该光学测姿系统具有较高的测量精度,实用性好,可推广性强。
稳定平台; 姿态精度评估; 光学测姿系统; 试验方案
Class Number U666.1
1 引言
重力仪是测定重力加速度的仪器。主要用来在地面上测量重力加速度值相对变化的一种高精度仪器,重力仪广泛应用于地球重力场的测量地壳形变观测以及重力勘探等项工作中,军事上也有重要用途。陀螺稳定平台是应用舰船、飞机装载重力仪对重力进行测量必不可少的仪器设备。由于重力仪要求在工作时保证稳定的垂直指向,而搭载重力仪的运载体在运动时不可避免的要产生相对水平面的姿态变化,因此陀螺稳定平台主要用来提供稳定的水平基准和姿态信息,以此来保证重力仪在工作中一直保持非常稳定的垂直指向,抵消运动载体姿态所带来的测量误差,隔离振动等干扰因子对重力测量的影响。
陀螺稳定平台精度评估是稳定平台姿态控制的关键技术之一。姿态控制精度的评定不仅仅取决于测量系统硬件设备的性能和精度,还与所采用的精度评定试验方法有关[1]。因此本文的主要内容就是设计和研究高精度的稳定平台精度评定试验方法。
2 稳定平台精度评定方法
对稳定平台姿态精度进行评定,可以先找到高精度的姿态信息作为评定基准,这就涉及到高精度的姿态控制和高精度的姿态测量这两种技术,实现起来难度较大,如果陀螺稳定平台本身精度已经很高,那么更高精度的姿态基准将会很难获得。
美国US7451022B1号专利给出了一种平台姿态评定技术,其基本原理是:星追踪敏感器装在通过系统提供的东北天体坐标系的稳定平台上,星敏感器分别指向两个不同的恒星,记录这个角度差,通过此角度差直接得到惯导系统的姿态,从而进一步得到坐标转换矩阵,转换矩阵再进行进一步分解成系统误差和参考姿态误差,参考姿态误差再加上惯导姿态就是所需要的修正后的东北天体姿态基准。这种方法缺点是对天气等外部环境要求较高,可操作性不强,不适于实验室环境下的连续测试。文献[1]提出了利用谱分析法对动基座上陀螺平台进行精度统计测量的方法,不需要借助外部测量设备,缺点在于该方法需要测量系统的传递函数和角度/电压转换系数,并且要求系统是时不变的,因此这种方法可推广性较差。文献[2]提出了利用自准直仪和六角度摇摆台搭建实验测试系统的方法,利用光路的传播特性进行稳定平台姿态控制精度的外部测试,这种方法原理简单,适用性好,但其缺点在于自准直仪等高精度光学测量设备成本较高、调试困难。
3 陀螺稳定平台误差源分析
光纤陀螺稳定平台主要由平台台体(包括平台台面、传感器、力矩电机及减震器等)、控制系统(包括控制机箱和上位机)和供电系统三个部分组成。平台台体是稳定平台的执行部分,其主要功能是检测平台台面的姿态信息,并响应控制系统的控制信号,从而维持平台台面的水平。控制机箱是稳定平台的决策部分和监控部分,其主要功能是接收平台台面的姿态信息,并将其作为控制回路的输入信号,经过解算,控制机箱输出控制信号到平台台体;控制机箱的另一功能是对数据进行显示、保存。供电系统主要为平台台体、控制机箱和上位机提供电源。
平台台体部分的系统构成如图1所示。
如图1所示,IMU、重力传感器与平台台面固连。IMU为平台台面和重力传感器提供姿态基准,在不考虑安装误差的情况下,认为IMU输出的姿态角为0°时,平台台面处于水平状态。在考虑安装误差的情况下,则先对安装误差进行标定。设IMU在横滚和俯仰方向的安装误差角分别为α、β,则认为IMU输出的横滚和俯仰角分别为-α、-β时,平台台面处于水平位置。横滚、俯仰电机受控制系统控制,驱动平台台面连同重力传感器和IMU转动。
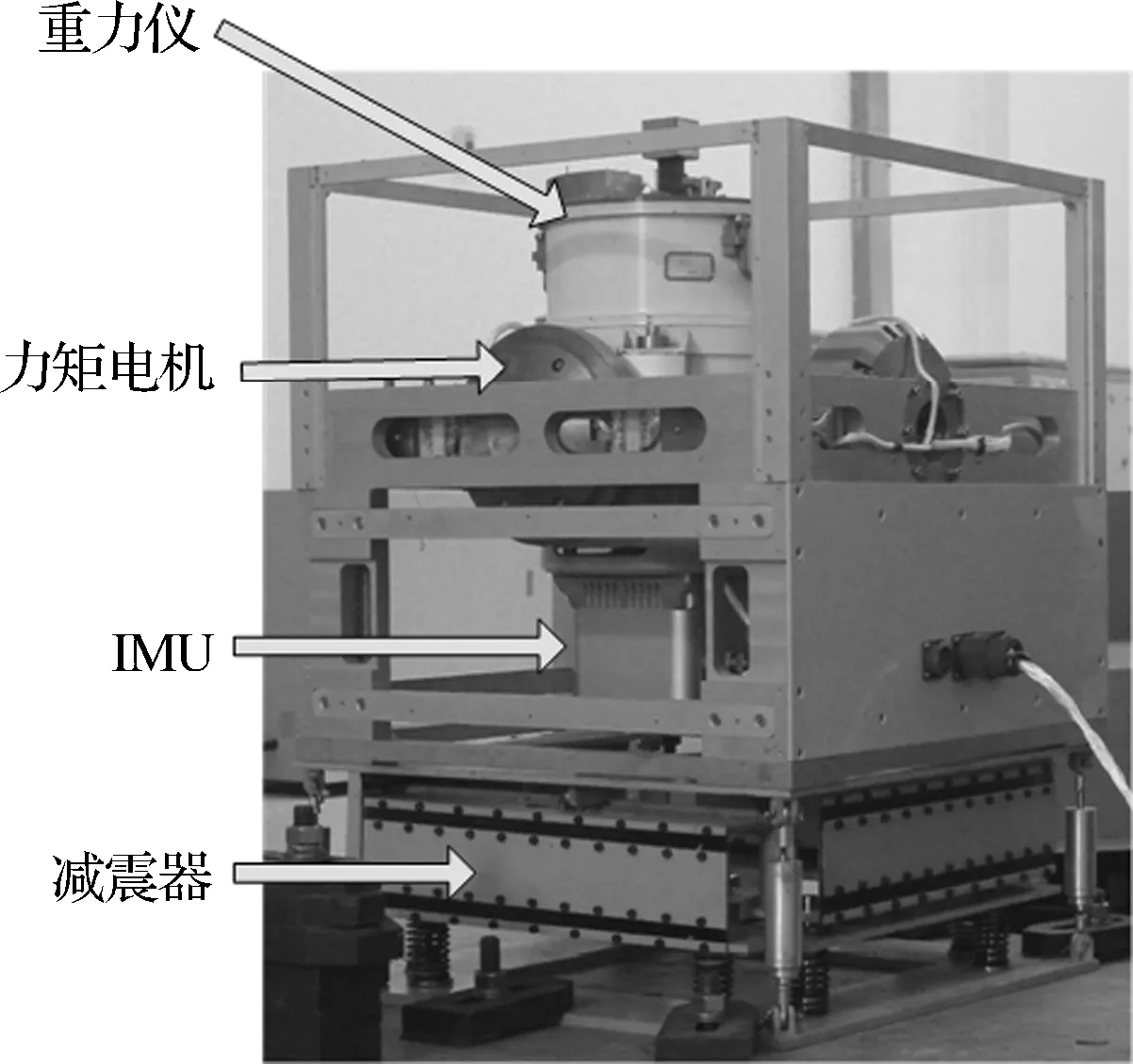
图1 陀螺稳定平台台体构成
由以上分析可知,陀螺稳定平台姿态控制系统主要由四部分组成:光纤陀螺惯导系统敏感稳定平台台体姿态提供高精度的姿态信息,通过数字信号处理器以及功率放大模块组成的信号处理器完成控制算法控制电机动作,电机带动台体保持水平姿态。整个控制回路以IMU作为姿态传感器,控制系统由信号处理模块与控制电机组成,控制台体姿态。因此,对陀螺稳定平台误差源的分析应该从这几个组成部分入手。
IMU作为姿态传感器,其误差将直接引入控制系统,IMU误差主要包括惯导安装误差以及惯性器件本身的误差特性:惯导安装时要求其可以准确复现稳定平台台体的姿态,但是由于安装误差不可避免,惯导输出数据中除了台体的姿态信息,往往还叠加了惯导本身的安装误差,因此在误差分析时安装误差不可忽视;惯性器件本身的误差特性主要包括零偏及漂移,零偏指陀螺在零位输出的零点偏移,漂移指陀螺在干扰力矩作用下产生的偏离原来方向的进动。信号处理模块完成数字信号处理、功率放大等功能,是控制系统的核心环节,这一过程中数据的处理、控制算法的精度等都会影响姿态控制效果。伺服电机直行控制指令完成姿态控制,由于电机存在控制死区等,因此也会引入控制误差。由于本文采用实验测量的方法标定稳定平台控制精度,实验方案、测量方法以及后期数据处理方法还将引入外部测量误差[3]。
由以上分析可以得到陀螺稳定平台误差源结构框图如图2所示。
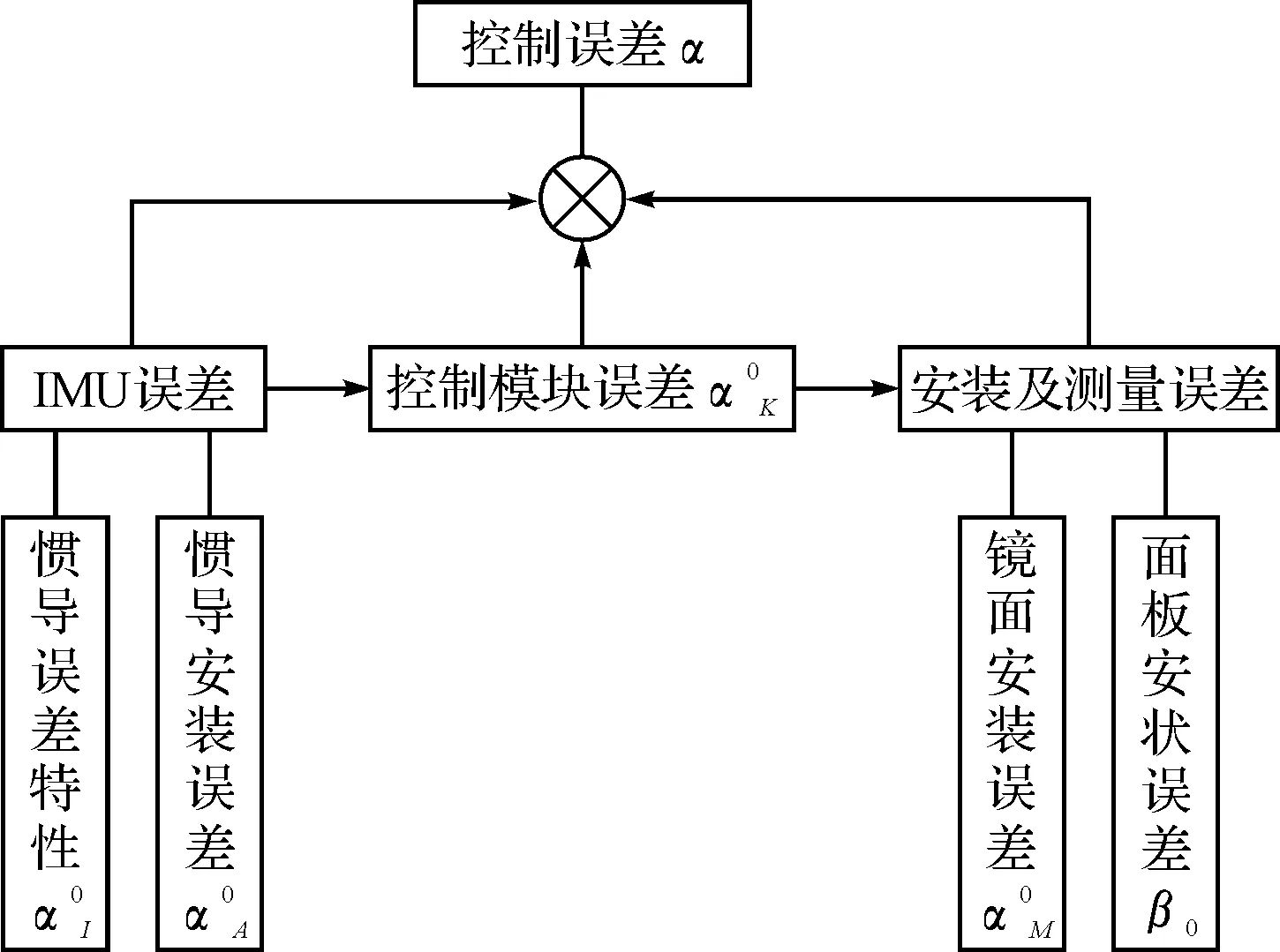
图2 陀螺稳定平台误差源
由图2可以看出陀螺稳定平台姿态控制误差α的表达式为
α
(1)
式(1)定义了陀螺稳定平台姿态控制误差基本来源。此处加号代表了各误差源的耦合作用[4],并不是简单的直加。
4 陀螺稳定平台姿态控制精度实验方法
针对陀螺稳定平台自身的特点,参考文献[2]设计的试验评定方法,本文设计了一套基于光线传播特性的光学测量系统,用来进行稳定平台姿态控制精度试验,其基本原理如图3所示。
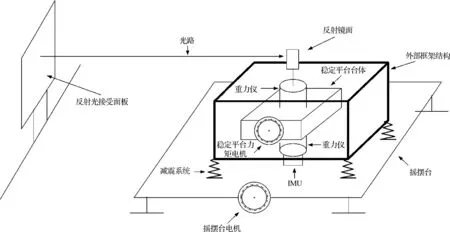
图3 陀螺稳定平台姿态精度实验评定系统
如图3所示垂直地面在重力仪上固连一反射镜面,保证反射镜面能够完全跟随重力仪的姿态变化。反射光接收面板垂直于水平面并始终保持静止状态,激光光路垂直接收面板到达反射镜面后,反射回接收面板。这就是整个试验系统的基本结构及安装条件。
该试验系统基本工作原理在于光的直线传播和反射特性,由图3可知,激光光线垂直于接收面板水平于地面射出,到达固连于稳定平台重力仪台体上的反射镜,如果稳定平台可以保证重力仪台体保持水平状态,即反射镜面与接收面板相互平行,那么出射激光就会垂直到达反射镜面,根据光的反射特性,反射激光会沿入射激光光路返回。这样,在接受面板上,激光入射点与激光出射点就会重合。原理如图4所示。
图4所示的是理想状态下该试验系统光的传播特性,在理想状态下,认为重力仪可以保持完全水平状态,不考虑试验设备的安装误差以及陀螺稳定平台姿态控制系统的控制误差,如果真的是这样,那么该试验系统也就失去了存在的意义[6]。该试验设计目的就在于测量陀螺稳定平台姿态控制系统的控制精度,因此控制误差不可忽略,另外试验设备的安装误差也会对试验结果造成较大的影响,同样不可忽视[7]。这样,实际状态下的光学试验系统应如图5所示。
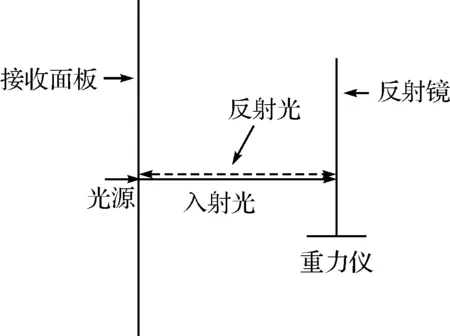
图4 理想状态下的光学试验系统

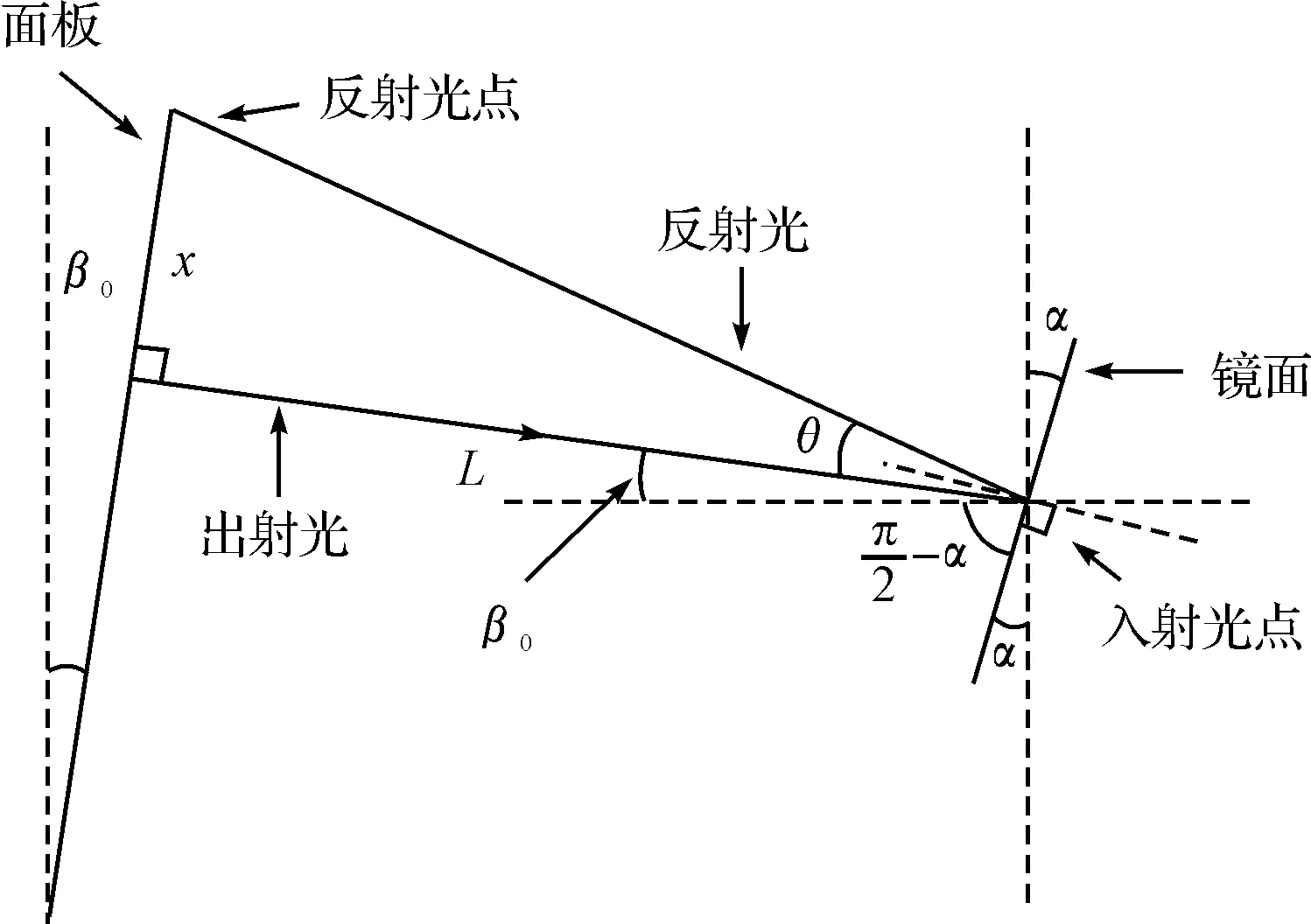
图5 实际状态下的光学试验系统
(2)
所以
(3)
(4)
由此,设计试验方案如下:

陀螺稳定平台置于双轴摇摆台上,利用摇摆台模拟载体静止和运动姿态[8]。在开始试验之前,用x、y坐标分割接收面板光点接收区域,便于对光点位移的读取。另外为便于后期数据分析,可适当调整光线传播距离L,使其对反射光点接收面板坐标纸单元格的距离l,满足:
即反射光点在接收面板坐标纸上每偏离一个单位坐标,代表姿态控制精度一个角分的偏离[9]。这样在后期数据处理时只需要对反射光点坐标做一定的统计学分析就可以得到以角分为单位的姿态控制精度。
5 试验结果
1) 调平实验:控制系统不工作,手动调平陀螺稳定平台后,记录此时光点坐标X1=4.5。
2) 静态试验:在控制系统作用下,稳定平台隔离载体姿态变化的影响,摇摆台保持静止,模拟载体静止时的状态。每分钟记录一次反射光点坐标,汇总如图6所示。

图6 静态试验光点坐标汇总
图6所示是陀螺稳定平台姿态控制系统在连续静态工作状态下,反射光点坐标的变化情况。在静态环境下稳定平台姿态控制精度主要受随机误差的影响较大,主要误差来源是陀螺、加速度计的随机偏置以及读数误差。
3) 动态试验:在控制系统作用下,摇摆台做不规则摇摆,以30min为一个周期,摇摆25min,停止摇摆静止5min,模拟实际状态下运载体的复杂运动状况。由于摇摆台在激光传播方向上的摇摆引起反射镜面在该方向上的前后线运动,造成光点坐标在接收面板上的上下移动的现象,这种位移与控制系统的姿态控制精度无关,其原理如图7所示。

图7 接收光点位移现象
摇摆台纵摇引起反射镜面水平位移ΔL,相应的接收光点位置产生上下位移Δx,因此摇摆状态下一分钟内记录两个数据,即一个周期最大值和一个周期最小值以此观察接收光点坐标x的变化情况,静态状态下仍然每分钟记录一个光点坐标。动态试验光点坐标如图8所示。

图8 动态试验光电坐标
图8所示是陀螺稳定平台姿态控制系统在连续动态工作状态下,反射光点坐标变化的情况,点线曲线表示一分钟内接收光点坐标的最大值,细线曲线表示同一分钟内接收光点坐标的最小值,粗线曲线表示一个摇摆周期内静态时段的接收光点坐标值。细线和点线两条曲线的偏差反映了反射镜面与镜面理想位置的偏差角,这个偏差角是由反射镜面安装误差以及控制系统姿态控制误差共同作用造成的。
对静态、动态试验接收面板上反射光点的坐标做进一步分析得到表1。
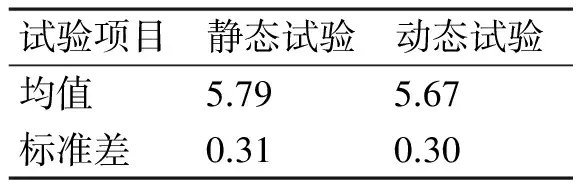
表1 试验数据分析
表1所示是对静态、动态试验反射光点坐标做统计学分析的结果,其中动态试验利用的光点坐标只取一个摇摆周期中静态段的坐标值,以此来评定陀螺稳定平台在动态环境下的姿态控制精度。在试验一调平试验中已经标定控制系统不做用时的反射光点坐标为4.5,即可以认为光点坐标绝对零位就是4.5,因此以静态、动态试验环境下光点坐标的均值减去绝对零位就可以得到姿态控制系统在静态、动态环境下的姿态控制精度分别为1.29′与1.17′,标准差分别为0.31′与0.30′。

6 结语
本文利用光学原理设计实现了可适用于稳定平台姿态控制精度分析的试验系统,针对该试验系统提出了相应的试验方案。使用本文设计的试验系统以及试验方案对陀螺稳定平台姿态控制系统进行了姿态控制精度分析,试验结果表明该姿态控制系统姿态控制精度达到1′,标准差在0.3′左右,具有较高的姿态控制精度。
[1] 冯丹琼,徐晓苏.船用捷联惯性导航系统姿态算法精度评估分析[J].中国惯性技术学报,2006,13(4):10-13.
[2] 吴国亮,李树林,潘勇,等.大负载稳定平台精度检测技术研究[J].声学与电子工程,2011(2).
[3] 姚国兴.动基座上陀螺平台水平精度统计测量方法[J].华南理工大学学报,1988,16(2):35-40.
[4] Jiang Y F, Lin Y P. Error Eestimation of INS Ground Alignment Through Observability Analysis[J]. IEEE Transactions on Aerospace and Electronic Systems,1992,28(1):92-97.
[5] 徐景硕,秦永元,顾冬晴.固定点平滑技术在惯导系统对准精度评估中的应用[J].测控技术,2004,23(11):74-76.
[6] 赖小明,刘洁瑜.光纤陀螺稳定平台调平系统设计[J].计算机测量与控制,2007,15(3):363-366.
[7] 潘良,赵文华,刘新明,等.经纬仪测星评估惯导系统姿态角误差方法[J].中国惯性技术学报,2011,19(3):369-373.
[8] 丛爽,邓科,尚伟伟,等.陀螺稳定平台建模分析[J].科技导报,2011,29(9):42-47.
[9] 姜雪原.卫星姿态确定及敏感器误差修正的滤波算法研究[D].哈尔滨:哈尔滨工业大学,2006:38-42.
[10] Titterton D H, Weston J L. Strapdown Interial Navigation Technology[M]. 2 nd Edition. USA: The Institute of Electrical Engineers,2004:83-86.
Experimental Evaluation Method of Gyro Stabilized Platform Attitude Control Accuracy
GUO Shiluo XU Jiangning GUO Bin
(The Department of Navigation, University of Engineering, Wuhan 430033)
Evaluation of gyro-stabilized platform is one of the key technologies to assess the accuracy of a stable platform for attitude control. Attitude control accuracy not only depends on the performance assessment of the accuracy of the measurement system and hardware devices, but also relates with precision evaluation test methods. Specific to large loads stabilized platform’s attitude control accuracy assessment, gyro stabilized platform error mechanisms has been analyzed, a high-precision optical measuring system and corresponding test programs has been proposed in this paper, dynamic/static experiment has been performed. The experiment results show it has high accuracy, practicability and potential replication.
stabilized platform, attitude accuracy assesment, optical measurement system, experimental program
2015年1月18日,
2015年3月7日 作者简介:郭士荦,男,硕士研究生,研究方向:惯性技术及应用。许江宁,男,教授,博士生导师,研究方向:惯性技术及应用。郭斌,男,硕士研究生,研究方向:惯性技术及应用。
U666.1
10.3969/j.issn1672-9730.2015.07.043
