基于雷达系统分布交互式视景仿真系统研究
2015-03-11糜小兵孟献轲
糜小兵 朱 峰 孟献轲
(中国电子科技集团公司第二十八研究所 南京 210007)
基于雷达系统分布交互式视景仿真系统研究
糜小兵 朱 峰 孟献轲
(中国电子科技集团公司第二十八研究所 南京 210007)
该仿真技术从单机平台到基于HLA的分布式交互仿真,视景仿真在这些仿真技术平台上在军事、科学研究、建筑等诸多领域获得了广泛应用。在雷达系统越发复杂、设备成本越发高昂的今天,采用虚拟现实技术对雷达系统进行测试、训练与研究,不但可以全面提高效率,也可以有效降低成本,对雷达系统测试、评估等方面都有良好的辅助作用。
分布式交互仿真; HLA; 视景防真; 分布式
Class Number TP391
1 引言
伴随仿真技术的发展,从单机平台到SIMNET(Simulation Network)再到目前的基于HLA(High Level Architecture)的分布式交互仿真(Distributed Ineractive Simulation,DIS),视景仿真也在这些仿真技术平台上在军事、科学研究、建筑等诸多领域获得了广泛应用,分步式交互是视景仿真的重要发展方向[1]。在雷达系统越发复杂、设备成本越发高昂的今天,采用虚拟现实技术对雷达系统进行测试、训练与研究,不但可以全面提高效率,也可以有效降低成本[2]。
2 DIS和HLA概述
DIS是指以计算机网络为支撑,利用网络将分步在不同地理位置的不同类型的仿真模块联结统一起来,通过模块间的实时数据通信构成一个时空一致的大范围以及多参与者协同作用的复杂综合性仿真环境[3]。DIS是通过网络来进行模块通信,其通信协议主要遵循于IEEE标准、ISO标准、Internet标准[4]。由于DIS不能支持大规模的仿真,因此需要新的技术框架来扩展,于是MSMP(M&S Master Plan)应运而生,而HLA是MSMP的核心内容,是从体系结构上对DIS不足之处进行完善,从而满足分步式仿真的可重用和交互操作的需要[5]。基于HLA框架的仿真系统,不把具体的仿真应用和联邦成员的构建作为其重点,而是强调在已用的联邦成员之间如何实现相互操作从而组成一个联邦,这样既可以把应用层和底层的支撑系统分离开来,又可以能够对系统进行扩展和模块能够相互独立的开发[6]。
3 联邦仿真系统模型
本文的视景仿真基于HLA[7]的分布交互式,在整个仿真系统中,每个联邦成员各自使用一台计算机作为仿真节点,整个仿真系统的通信在局域网中进行。仿真系统如图1所示。

图1 仿真模型结构图
将整个仿真任务分布式分解后,按照主要功能分为以下几个联邦节点:主控、平台、发射与回波、接收和信号处理。
1) 主控:对整个仿真流程进行推进和控制。主控节点担负着初始化仿真参数的设置,同过交互界面输入雷达参数、信噪比、雷达观测范围、PRF等。
2) 平台:主要是利用Vega软件加载Creator所创建的该型雷达和目标模型数据库,进行视景仿真演示。仿真中所演示的雷达和目标位置,目标的飞行方向、飞行速度等初始参数,由主控节点设置的参数提供。
3) 发射与回波:根据该型雷达的发射信号类型、发射方向图调制方式、雷达功率等参数生成发射信号,并根据当前目标与雷达的相对位置计算各个通路的延迟和增益,最后得到回波信号序列。同时,该节点还包括噪声和杂波的生成,并将噪声序列和杂波序列叠加到回波序列中,然后再发送到下一个节点。
4) 接收节点:模拟雷达对回波数据的接收。由于本文内容涉及的仿真没有加入干扰机节点,因此接收节点只对回波数据进行了接收而没有其他的工作。若加入了干扰机节点,则接收节点负责回波和干扰序列的叠加,并将完整的回波信号序列储存在文件中。
5) 信号处理:该节点是对前面几个节点产生的回波信号进行处理。信号处理的结果根据所仿真雷达的具体功能和参数来决定。例如,本文所仿真的雷达需要利用每个发射脉冲的回波信号序列组成的矩阵进行处理,进行动目标检测,以及检测到目标以后的角度定位和速度测量。
4 仿真目标及框架设计
视景仿真平台在基于HLA架构下,主要完成把利用Vega API加载Creator创建的模型数据库完成各种雷达场景中模拟演示,比如雷达工作状态、飞机朝雷达飞行、视点的切换,多通道同时显示雷达和飞行目标等,把飞机的数据传递给回波计算平台。在HLA的框架下,对于视景仿真平台整个框架可以设计成三大部分:联邦通信与数据处理、雷达场景和飞行目标建模、视景仿真驱动。如图2所示。

图2 视景防真框架设计
从图2可知,视景仿真模块主要和主控平台和回波计算平台数据通信,具体是视景仿真模块从主控平台获取要调入的飞机的型号、速度、初始位置和姿态,其中飞机的型号以从模型数据库中查询并加载,然后在仿真过程中把飞机改变后的位置和姿态传递给回波计算平台,这样协同工作,与其它联邦成员共同完成整个仿真任务,其程序流程图3所示。

图3 程序流程图
5 系统测试及视景仿真效果
整个仿真系统由pRTI为支撑以及相关的软件为辅助,遵循HLA架构,其仿真节点由六台性能强大的图形工作站组成硬件平台,其硬件平台和软件环境分别如表1和表2所示。
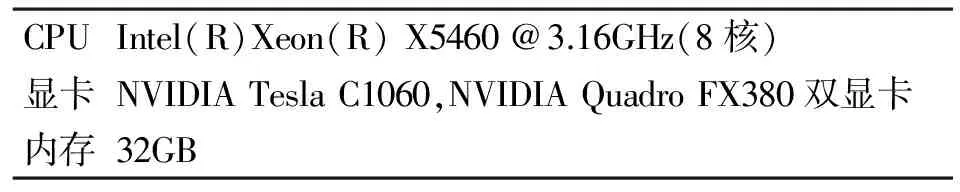
表1 仿真节点硬件参数

表2 仿真系统的软件环境
在视景仿真应用中,操作者可以根据仿真需求来切换视点,只有进入到视点范围内的场景、实体模型及环境特效才能被显示出来,其它部分将被裁减掉[8]。所以视点的管理在视景仿真中起着非常重要的作用。视点在视景仿真中代表着人眼或摄像机的作用[9]。在视景仿真实现中是以vgObserver为代表实现的,它用来定位、管理、渲染一个通道列表[10]。图4和图5为飞机不同的视点演示。
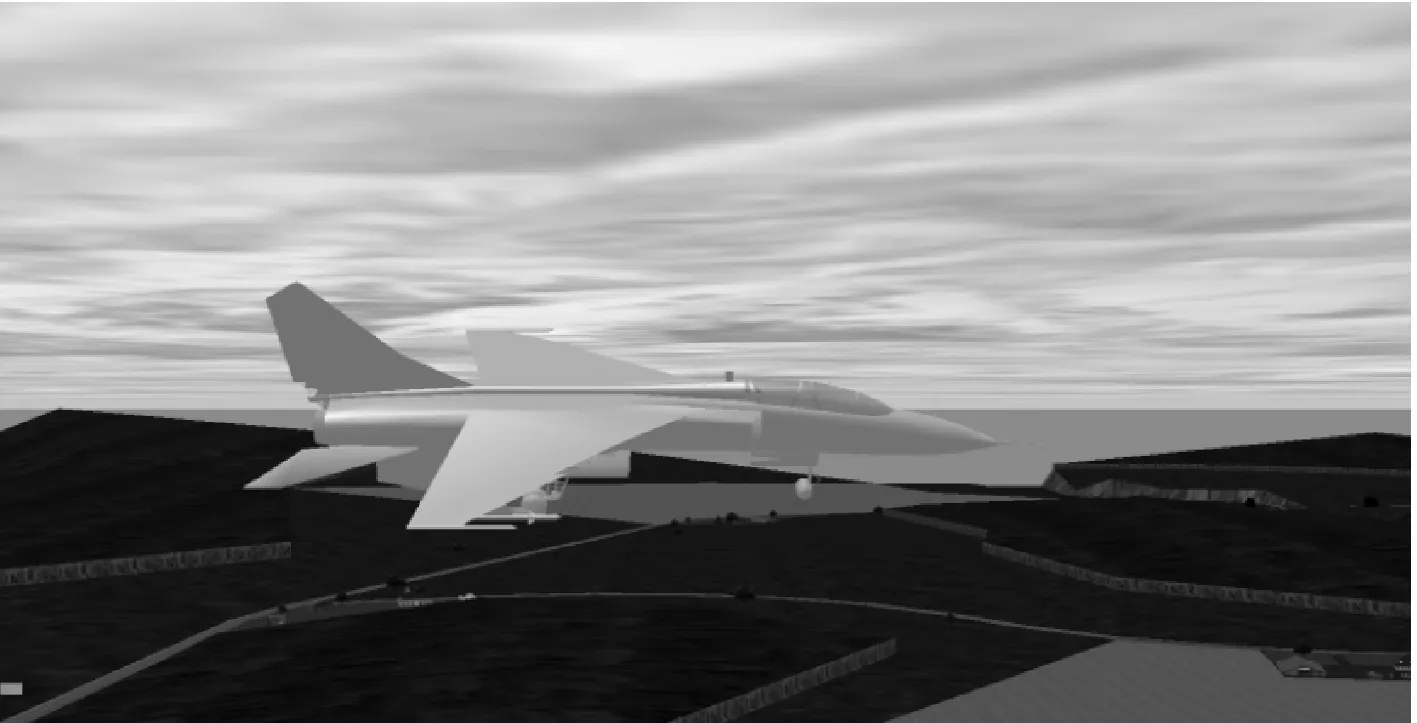
图4 飞机右视图

图5 飞机前视图
多通道视图展现飞机在雷达的远距离处和当飞机和雷达在同一视点内的视图,如图6和图7所示。

图6 多通道视图

图7 飞机飞离雷达视图
通过上述仿真效果可知,雷达系统的视景仿真模块作为联邦成员有效完成了飞机从雷达远距离外到飞机出现在雷达上方的整个过程的演示,飞机飞离雷达视图对应的雷达系统测试结果如图8所示。

图8 雷达系统测试结果图
6 结语
本文阐述了DIS到HLA整个仿真的发展历程,对基本概念进行了讲解,给出某型雷达系统的联邦仿真框架,并设计了视景仿真平台的框架,最后给出了视景仿真平台的演示效果图。在雷达系统越发复杂、设备成本越发高昂的今天,采用虚拟现实技术对雷达系统进行测试、训练与研究,不但可以全面提高效率,也可以有效降低成本,对雷达系统测试、评估等方面都有良好的辅助作用。
[1] 王正中.仿真学科的研究与思考[J].系统仿真技术及其应用,2007(9):1-4.
[2] 马脊武,叶文,于凤全,等.虚拟现实技术及其在时示仿真中的应用[M].北京:国防工业出版社,2005:21-22.
[3] Wei Ying-mei. Research on Collision Detection in Virtual Environment[D]. Changsha: National University of Defense Techology,2000:11-12.
[4] 王乘,李利军,等.Creator可视化仿真建模技术[M].武汉:华中科技大学出版社,2005:93-95.
[5] Stephen Bachinsky, Larry Mellon. Glenn Tarboxand Richard Fujimoto, RTI 2.0 Architecture. SIW Fall 97 Orlando USA.
[6] Skolnik M I. Radar handbook[M].北京:电子工业出版社,2003:12-14.
[7] Sensor Products Guide[M]. Multigen Paradigm Inc.,2000:51-52.
[8] Alfred J Menezes, Paul C van Orschot, Scott A Vanstore. Handbook of applied cryptography[M]. Beijing: Publishing House of Electronic Industry,2004:434-435.
[9] 刘永坦.雷达成像技术[M].哈尔滨:哈尔滨工业大学出版社,1999:173-174.
[10] 贾立出,王立文.改进变步长算法在实时飞行仿真中的应用[J].计算机仿真,2007.56-57.
Distributed Interactive Visual Simulation System Based on Radar System
MI Xiaobing ZHU Feng MENG Xianke
(The 28th Reaseach Institute of China Electronics Technology Guoup Corporation, Nanjing 210007)
Simulation technology from a single platform to the distributed interactive simulation based on HLA, visual simulation on the simulation platform in many fields such as military, scientific research, building win a wide range of applications. Today, radar system becomes more and more complex and the cost of equipment becomes more and more expensive. Using virtual reality technology to radar system test, training and research, not only can improve efficiency, but also can effectively decline low cost, test, evaluation of radar system has a good supporting role.
distributed interactive simulation, high level architecture, visual simulation, distributed
2015年1月18日,
2015年2月20日 作者简介:糜小兵,男,硕士研究生,工程师,研究方向:作战指挥控制。朱峰,男,工程师,研究方向:作战指挥控制。孟献轲,男,工程师,研究方向:作战指挥控制。
TP391
10.3969/j.issn1672-9730.2015.07.031
