基于惯导解算与数字滤波的舰船振荡运动的分离研究
2015-03-11刘志鹏刘锡祥
赵 玉 宋 清 刘志鹏 刘锡祥
(1.东南大学仪器科学与工程学院 南京 210096)(2.微惯性仪表与先进导航技术教育部重点实验室 南京 210096)
基于惯导解算与数字滤波的舰船振荡运动的分离研究
赵 玉 宋 清 刘志鹏 刘锡祥
(1.东南大学仪器科学与工程学院 南京 210096)(2.微惯性仪表与先进导航技术教育部重点实验室 南京 210096)
舰船在风浪激励或(和)其它因素的作用下产生六自由度的随机摇荡运动,而摇荡运动将降低舰载武器的打击精度。针对该问题,论文在捷联惯导(SINS)导航解算的基础上,提出了数字滤波的舰船振荡运动分离方法,以实时分离舰船振荡运动,并实时修正舰载武器的运动轨迹,提高其打击精度。由于惯性导航系统为避免加速度对平台跟踪地垂线的干扰而自然形成舒勒振荡,此振荡必然会引入舰船运动的导航解算结果中,因此为提取出瞬时运动,引入数字高通滤波器消除舒勒振荡。论文给出了瞬时运动定义及滤波器的实现方法,仿真结果证明了该方法的有效性。
SINS; 高通数字滤波器; 振荡运动; 运动分离
Class Number U675
1 引言
船舶在海上航行过程中受到海浪、海风以及其它干扰力的影响,将会产生六自由度的复杂运动,对武器控制、舰载机着舰以及船上设备和成员等都产生不利影响。尤其在恶劣海况条件下,对舰船海上作业将产生很大的安全隐患[1~2]。为提高舰载机的生存能力,可将舰船三轴振荡运动提取出来,及时调整路线轨迹,减少起降过程中事故的发生。因此舰船瞬时运动分离研究对于保障舰载机的安全起降等具有重要的意义。
长期以来,广大学者从船舶的安全性考虑,对由海浪引起的舰船六自由度运动进行了广泛的研究。目前关于舰船摇摆运动大多采用惯性测量方法,相对较成熟。与摇摆运动的惯性测量方法相比,振荡运动的研究进展比较缓慢[2~5]。本文针对此问题,利用捷联惯导系统对舰船航行运动进行导航计算,并设计数字高通滤波器对舰船三轴振荡运动信息进行提取并加以分析。
2 舰船运动特性及瞬时运动坐标系定义
2.1 舰船运动特性
舰船运动分析如图1所示。由于舰船体型巨大,出海时间比较漫长,航行线运动近似为直线运动,其转向、加速、减速运动因舰船本身结构及动力性能需要较长时间。因此航行线运动属于低频运动,而随波浪被动运动的摇荡运动相对航行主运动周期较短,属于高频运动[6]。
将舰船的横摇、纵摇、艏摇以及横荡、纵荡、垂荡六自由度的运动称为舰船的瞬时运动。

图1 舰船运动特性
2.2 瞬时运动坐标系定义
为了从舰船的综合运动中将瞬时运动提取出来,首先给出瞬时运动坐标系(半固定坐标系)的定义[7],如图2所示,O为船体重心,OE、ON为水平面上的东向轴和北向轴,OXdYdZd(右前上)为船体坐标系,OXj、OYj分别为载体坐标系OXd和OYd在水平面的投影,OZj轴垂直向上与OXj和OYj构成右手系。半固定坐标系的定义使得线运动与角运动分离开来,因此可直观的表示出舰船的三轴振荡运动。
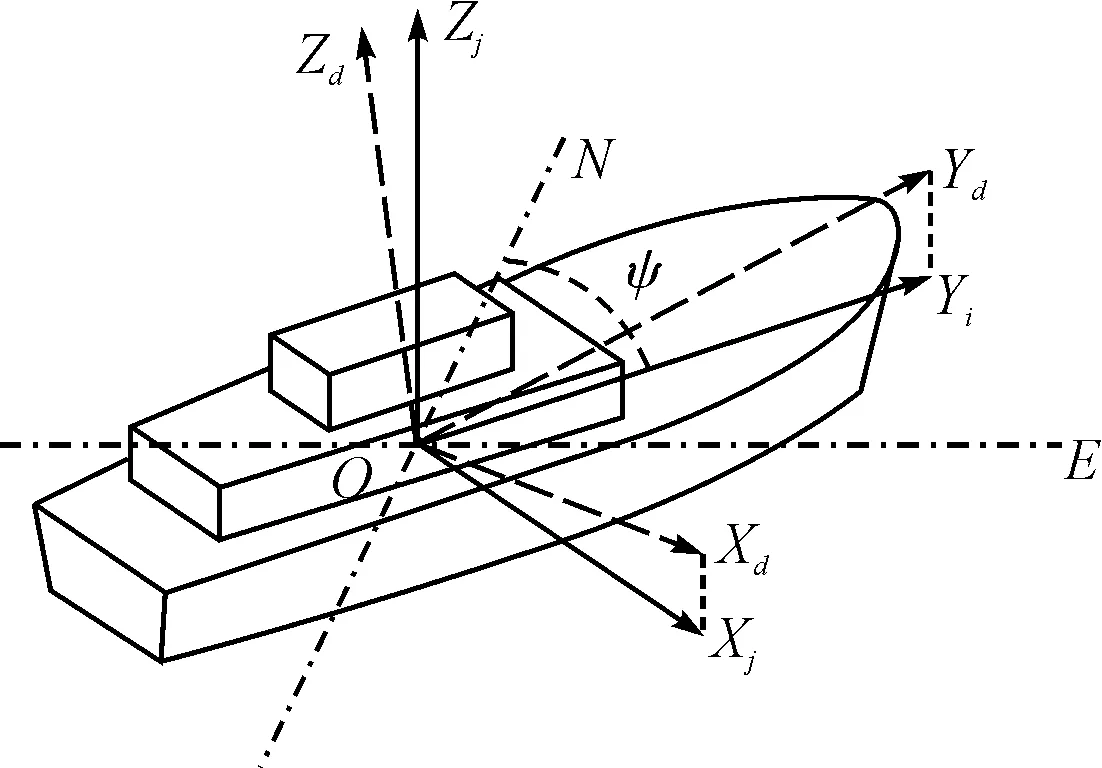
图2 瞬时运动坐标系

(1)
其中ψ为航向角。
3 捷联惯导解算原理

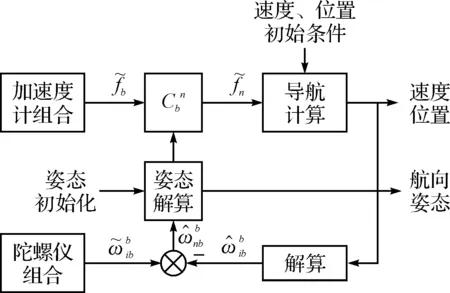
图3 捷联式惯导系统原理图
3.1 姿态更新计算
(2)
由于四元数Q中包含了所有的姿态信息,从四元数更新获得的姿态矩阵中提取实时姿态角,公式如下所示
(3)

3.2 速度更新计算

(4)
展开成分量形式为
(5)
(6)
(7)

3.3 位置更新计算
经、纬度的计算由上一时刻的经纬度值以及速度信息获取,公式如下
(8)
微分方程为
(9)
其中,λ为当地经度,λ(0),L(0)为经纬度的初始值。
3.4 导航数据中的频率组成分析
舰船运动包括航行主运动和由海浪等周围环境作用引起的摇荡运动,显然通过惯导解算得到的舰船运动数据中包含有上述两种频率组成,但同时还包括有舒勒振荡、傅科振荡以及地球振荡三种频率。其中傅科振荡与地球振荡周期较长,分别为24h/sinL与24h,在有限的导航时间内,可以忽略该频率组成,认为其为常值。
舒勒在建立地球铅垂线时发现,如果地面上的数学摆或物理摆具有周期约84.4min钟的振荡运动,不论加速度如何,摆将始终保持铅垂位置,满足舒勒调谐的条件是摆长为地球半径,这样的单摆是不可能实现的,但是惯导系统用陀螺仪和加速度计却很容易实现。当陀螺罗经的无阻尼振荡周期为84.4min时,罗经的指北精度将不受外界干扰加速度的影响。惯性导航系统为避免加速度对平台跟踪地垂线的干扰,自然形成舒勒振荡,该振荡必然会引入舰船运动的惯导解算结果中。
单轴惯性平台方框图如图4所示。
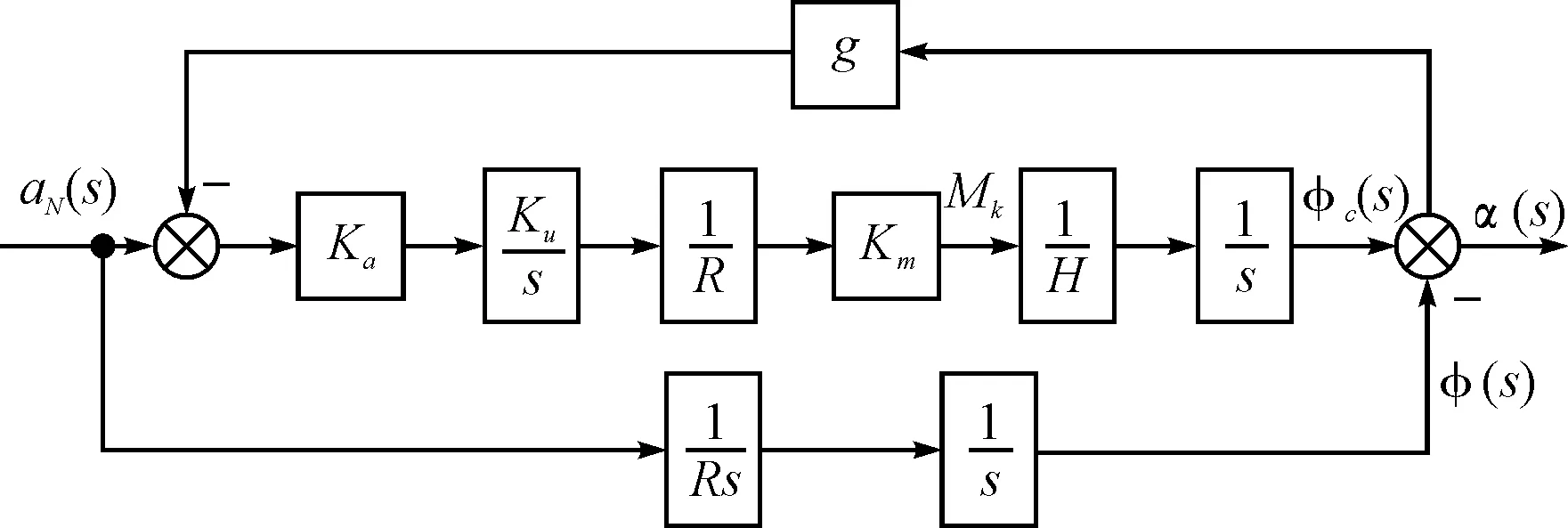
图4 单轴惯性平台动力学简化方块图
综上,为得到舰船瞬时振荡运动,通过引入数字滤波器来消除84.4min的舒勒振荡运动和舰船的低频主航行运动。
4 数字滤波器的设计
数字滤波器按照单位冲激序列的响应特性可分为无限冲击响应IIR数字滤波器和有限冲击响应FIR数字滤波器。
FIR数字滤波器的输出只与当前的输入和过去的有限个输入有关,而与过去的输出无关,其差分方程为
(10)
其中y(n)为滤波器的输出,x(n-r)为当前和过去的有限个输入,ar为滤波器系数。对上式通过Z变换可得到FIR数字滤波器的传递函数H(z):
(11)
IIR数字滤波器的输出不仅取决于过去和现在的输入,而且也取决于过去的输出,差分方程表示为
(12)
其中,ar和bk为IIR数字滤波器系数,y(n-k)为过去n-k时刻的输出。对上述差分方程进行Z变换可得IIR数字滤波器的传递函数如下:
(13)
4.1 FIR与IIR数字滤波器的比较
FIR数字滤波器的传递函数只有零点,极点全部在原点,因此滤波器是永远稳定的,一般采取非递归途径实现。对于IIR数字滤波器传递函数既有零点又有极点,滤波器不一定稳定,一般采用递归方法来实现[9~11]。从性能上来说,IIR滤波器可以用较少的阶数达到同样的滤波效果,运算次数少,所用存储单元少,比较高效经济,但是效率越高非线性也越严重。而FIR滤波器可以得到严格的线性相位,但是需要较高的阶数,要得到满意的性能通常需要一百多个系数,需要较多的存储器和运算。
两种滤波器各有优缺点,从使用要求来看,若对相位要求不敏感,选IIR滤波器较为合适。对于由海洋环境引起的舰船瞬时运动,考虑FIR滤波器延迟时间比较长,不能满足实时性要求,因此采用IIR数字滤波器进行滤波。
4.2 IIR数字滤波器的设计
对于IIR数字滤波器设计方法有两类:一是先设计出相应的模拟滤波器,得到传递函数Ha(s),然后将Ha(s)按一定的方法转换成数字滤波器的系统函数H(z),具体设计过程可参考文献[10]。另一种设计方法是直接在时域或频域上进行设计,这种方法要解联立方程,一般要借助计算机来实现。
基于Matlab的IIR数字滤波器的设计有三种方法:模拟滤波器设计法(经典设计法)、直接设计法和最大平滑法。本文介绍经典离散化的设计方法,设滤波器技术指标为:通带频率fp,阻带频率fs,通带最大衰减ap,阻带最小衰减as,采样频率Fs。
%****IIR数字高通滤波器设计****
%数字域指标变换成模拟域指标
wp = 2*pi*fp/Fs;
ws = 2*pi*fs/Fs;
%数字域频域预畸变
wp1 = 2*Fs*tan(wp/2);
wp2 = 2*Fs*tan(ws/2);
%模拟滤波器的设计
%创建巴特沃斯IIR型低通滤波器原型
[N,Wn] = buttord(wp1,ws1,ap,as,’s’);
[z,p,k] = buttap(N);
%由零极点转换为传递函数形式
[Bap,Aap] = zp2tf(z,p,k);
%模拟低通变高通
[Bbs,Abs] = lp2hp(Bap,Aap,Wn);
%**模拟滤波器变换为数字滤波器**
%双线性变换法设计数字滤波器
[b,a] = bilinear(Bbs,Abs,Fs);
5 仿真验证
首先设定船体的运动轨迹,其次通过以上章节介绍的算法及公式反推出惯性仪表的输出,叠加误差后模拟惯性仪表的实际输出值,然后带入公式进行导航运算,求得速度、姿态等船体信息。
舰船在海上运动时,会受到海浪的冲击产生振荡,假设舰船的水平角和航向角均以一定的摆幅和周期作简谐振动,并且舰船按一定的航向作等速航行。因此设计瞬时运动速度模型为
Vi=Aisin(wit+φi)
(14)
式中Vi为瞬时速度,Ai为振荡速度幅值,wi为振荡频率,φi为初始相位。
5.1 仿真条件设置
舰船运动初始航向角φ为45°,常值航速为5m/s,瞬时运动周期为7s,幅值1.88m/s,初始相位为零。
由于舒勒振荡周期为84.4min(频率约0.0002Hz),舰船随波浪的被动运动周期大约为十几秒左右。因此高通滤波器的通带频率fp<0.1Hz,阻带频率fs>0.0002Hz,设通带最大衰减ap=3dB,阻带最小衰减as=30dB。采样周期Ts的设置使得模拟域通带频率wp和阻带频率ws的值位于(0,1)区间。因此对滤波器设计参数为:fp=0.08Hz,fs=0.04Hz,ap=3dB,as=30dB,Ts=1s。
5.2 仿真结果及分析
舰船的振荡运动有三个,为了节约篇幅,此处仅对横荡运动进行分析,纵荡与垂荡可进行类似的分析。
对横荡速度的仿真结果和频谱分析分别如图5和图6所示,图5中的数据曲线为通过惯导解算求得的舰船在瞬时运动坐标系下的横荡速度值,仿真时间为3h。从图中可明显看出仿真结果中包含了惯导解算带来的84.4min的舒勒振荡。

图5 惯导解算横荡速度

图6 滤波前横荡速度的频谱分析
为得到瞬时运动值,用数字高通滤波器对其进行滤波得到结果如图7所示。从滤波结果及频谱分析(图8)中可看出滤波后成功将舒勒振荡滤除掉,得到频率为0.143Hz(周期为7秒)的横荡速度的瞬时运动波形。

图7 滤波后横荡速度
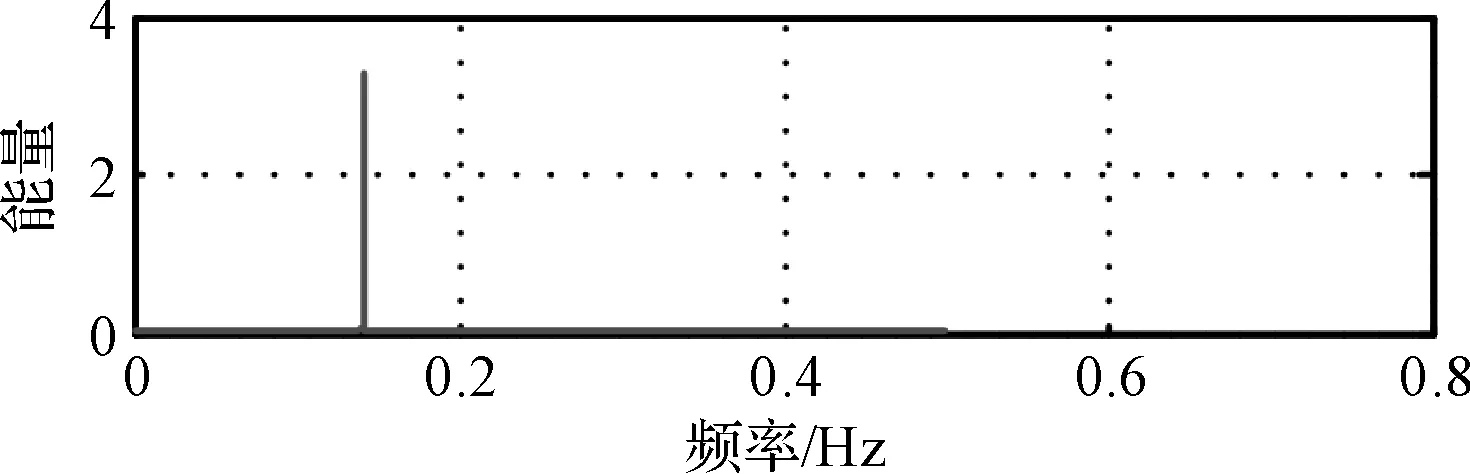
图8 滤波后横荡速度的频谱分析
6 结语
本文介绍了舰船运动特性、捷联惯性导航系统的基本原理、惯导解算用到的基本方程和惯导系统引入的舒勒振荡原理,以及高通数字滤波器的设计。由于篇幅限制,主要对横荡运动进行了分析,通过瞬时坐标系的转换以及数字滤波器的应用,成功将横荡速度从捷联惯导解算的舰船运动中分离出来。另外本文对于舰船运动模型的设定比较理想化,与真实环境还是有一定差距。
[1] 魏家庆.航母运动态势分析方法研究[D].哈尔滨:哈尔滨工业大学,2012.
[2] 徐琳琳.船舶运动仿真及建模预报研究[D].哈尔滨:哈尔滨工程大学,2007.
[3] 邹建武,祝明波,董巍.海浪建模方法综述[J].舰船电子工程,2010,30(11):10-13.
[4] HAO Y L, XIONG Z L, GAO W, et al. Study of strapdown inertial navigation integration algorithms[C]//Proceedings of the 2004 International Conference on Intelligent Mechatronocs and Automation,2010,30(11),10-13USA,2004:751-754.
[5] TIRERTON D H, WESTON J L. Strapdown inertial navigation technology[M]. 2nd ed. Reston: Co-published by the American institute of Aeronautics and Astronautics and the Institution of Electrical Engineers,2004:453-456.
[6] 龚晶.舰船瞬时线运动参数惯性测量技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[7] 孙伟,孙枫.基于惯导解算的舰船升沉测量技术[J].仪器仪表学报,2012,33(1):167-172.
[8] 秦永元.惯性导航.科学出版社[M].北京:北京科学出版社,2006:203-204.
[9] CHO S Y, KIM B D. Adaptive IIR/FIR fusion filter and its application to the INS/GPS integrated system[J]. Autimationca,2008,44(8):2040-2047.
[10] 陈江良,陆志东.基于MATLAB的数字滤波器设计及其在捷联惯导系统中的应用[J].中国惯性技术学报,2005,13(6):10-12.
[11] 严慧,于继明.基于MATLAB的IIR数字滤波器设计[J].软件导刊,2013,12(1):110-113.
A Separation Method for Ship Swaying Motion Based on SINS Navigation Solution and Digital Filter
ZHAO Yu SONG Qing LIU Zhipeng LIU Xixiang
(1. Key Laboratory of Micro-inertial Instrument and Advanced Navigation Technology, Ministry of Education, Nanjing 210096) (2. School of Instrument Science & Engineering, Southeast University, Nanjing 210096)
Ship swaying motion in six degrees caused by the effects of marine environment, such as the wind, will significantly decrease the accuracy of on-board weapon or other devices. Aiming to solve this problem, a new separation method based on Strapdown Inertial Navigation System(SINS) solution and digital filter is detailedly designed, which can separate the sawing motion from navigation motion effectively and generate compensation information for on-board device, thus increase the accuracy. In this paper, the definition about instantaneous movement and its coordinated frame are described, and the high-pass filter is introduced to remove Schuler oscillation which produced from the inertial navigation calculation in navigation results. The high-pass filter is designed and achieved, and simulation results indicate that with SINS solution and high-pass filter, the oscillatory motion can be effectively separated.
SINS, high-pass filter, oscillatory motion, movement separation
2015年1月5日,
2015年2月13日 基金项目:国家自然科学基金(编号:61273056)资助。 作者简介:赵玉,女,硕士研究生,研究方向:惯性导航与组合导航。宋清,女,硕士研究生,研究方向:惯性导航与组合导航。刘志鹏,男,硕士研究生,研究方向:惯性导航与组合导航。刘锡祥,男,副教授,博士生导师,研究方向:惯性导航与组合导航。
U675
10.3969/j.issn1672-9730.2015.07.021
