空中微智能传感探测系统研究
2015-03-11柏楠
柏 楠
(北京自动化控制设备研究所,北京100074)
空中微智能传感探测系统研究
柏 楠
(北京自动化控制设备研究所,北京100074)
针对智能传感技术未来的重要发展方向,分析了作为空中微智能传感探测系统的微型飞行器(MAV)技术特点和应用前景,研究了MAV的技术类型和国内外现状,总结了MAV的技术发展趋势,并在分析MAV主要系统构架的基础上,梳理了MAV系统研制所涉及的主要关键技术,最后对MAV的未来发展给出了建议。
智能传感;微型飞行器;MAV
0 引言
随着电子信息技术的快速发展,传感系统已不再局限于多个传感器的简单组合,智能化、微型化、一体化已成为其重要的发展方向,同时,智能传感的内涵也由传统的信息检测、信号处理、自校准、自诊断等功能逐渐拓展至可在地面、水下及空中自主移动并执行传感探测任务。微型飞行器MAV(Micro Air Vehicle)是一种尺寸只有手掌大小(约15~20cm),可由单兵或机器人平台携带,具备自主飞行和传感探测功能的新型飞行器。MAV从概念提出到工程研究,始终围绕着空中监视、近距侦察、生化探测、巡视搜救等传感探测的应用需求,因此,MAV可认为是具备自主飞行能力的高度集成的微型智能传感系统即空中微智能传感探测系统。
1 MAV的技术特点及应用
20世纪90年代初,在美国国防高级研究计划局(DARPA: Defense Advanced Research Projects Agency)召开的一次未来军事技术讨论会上,美国兰德公司(RAND)首次提出了微型飞行器(MAV)的概念,其认为发展尺度位于昆虫量级的微型飞行系统对美国保持未来军事领先具有重要意义,并且随着空气动力学、微机电技术、传感技术以及先进一体化设计等技术的发展,MAV的研制是完全可实现的。1997年,DARPA正是批准启动MAV研究计划,投资3500万美元,组织了一批高等院校、研究机构,对MAV开展为期4年的专项研究。
根据DARPA当时的设计目标[1],MAV尺寸不超过15cm(如图 1)、重量不超过50g、任务载荷不超过20g、巡航速度10~20m/s、续航时间20~60min、航程10km、单机成本$1000~$5000(随着研究的深入,该技术指标逐渐被放宽)。
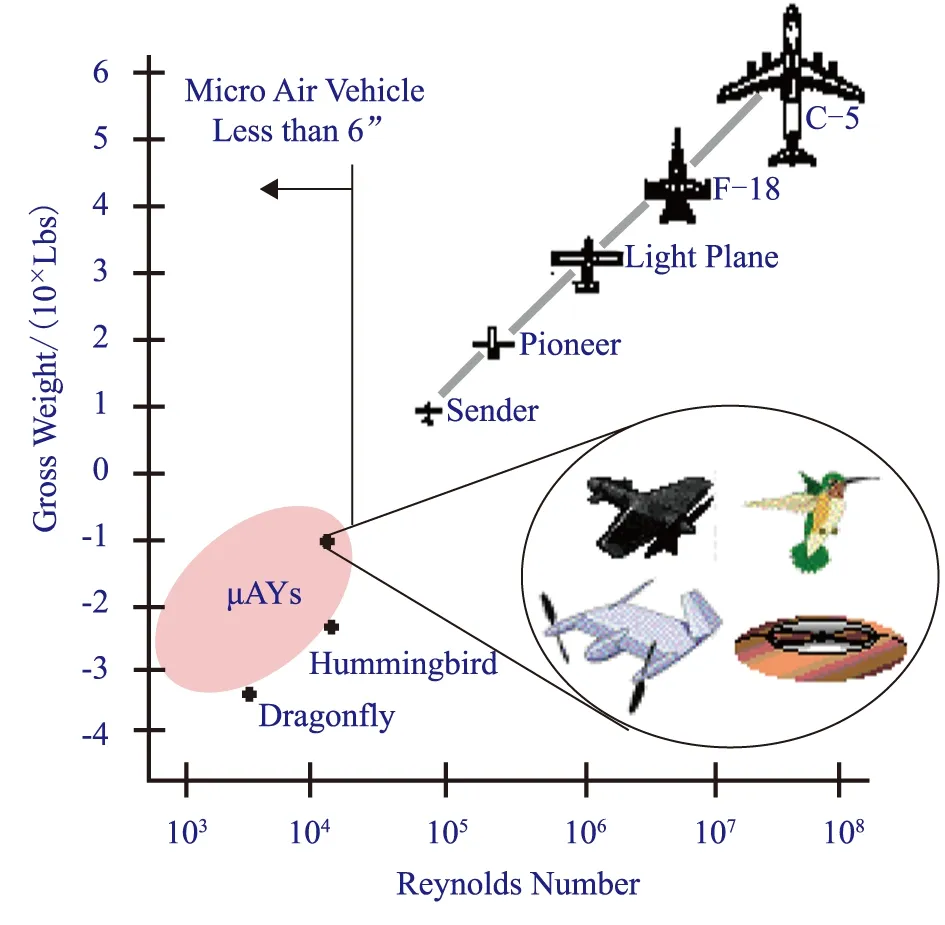
图1 MAV的Re数量级Fig.1 Reynolds number of MAV
美国军事专家认为,与常规无人飞行器相比,MAV系统应该具有军事适用性;具有高分辨率的近距离成像系统,且能全天候工作;具有高精度定位的能力;体积小、重量轻、适合单兵携带;成本低、可靠性高;隐蔽性好,不易暴露。MAV无论是在军事领域还是在民用领域,都有十分诱人的应用前景。
(1)在复杂城市环境中工作
由于MAV体积小、机动灵活,可以由单兵或小分队携带。因此非常适合在建筑物林立众多、地面复杂的城市环境中使用。
(2)低空侦察和通讯
MAV通过成像传感器可对50~100m的近距目标进行全天候监视侦察,甚至可飞至敌方内部隐蔽位置进行秘密侦察。
(3)对核/生化武器进行探测、识别
MAV可以“毫无顾忌”对核/生化武器这类目标区域进行识别和探测,而不会造成人员伤亡。
(4)测绘、搜救
利用MAV体积小、机动灵活的优势,可对洞穴等未知环境进行探测、测绘;通过MAV编队工作,可大大提高生命探测和搜救的效率。
MAV由于在军民用领域潜在的广阔应用前景,其很快成为世界各国家竞相研究开发的热点。
2 MAV的分类、现状及发展趋势
2.1 MAV的分类及特点
根据不同的飞行方式和布局,MAV主要可分为固定、旋翼和扑翼三种类型[2]。
固定翼MAV飞行速度快、飞行距离远,适用于较大范围的传感探测任务,但其最小尺寸受空气动力学原理的限制,微型化难度较大;同时固定翼MAV对最小速度和飞行姿态有较高要求,机动性较差,且无法悬停飞行。
旋翼MAV能实现悬停飞行,虽然其飞行速度较低,但适合于室内飞行,并能完成近距离静止拍摄、监听等任务;同时旋翼MAV受地面地形的影响较小,起飞和降落容易,另外微型旋翼MAV的微型化难度比固定翼MAV小。
扑翼MAV是目前航空领域公认的发展前景最大的一类MAV,从理论上说,其不仅可具备固定翼MAV速度快、作业半径大的优点,而且又能像旋翼MAV一样实现悬停飞行,甚至其机动性要远强于旋翼MAV。
2.2 微型固定翼飞行器
MAV最初是从固定翼开始研究的,目前已取得很大进步。MIT林肯实验室是最早研究MAV的机构。1996年7月,在美国第23届无人机系统协调会上,该实验室首次展示了一种鸭式布局的近距离MAV[3],翼展只有7.4cm,起飞重量仅10.5g,采用电池和电机驱动,续航时间为1h,飞行高度为100m,侦察范围为1km。
Black Widow[4-5]是Aero Vironment公司严格按照DARPA技术要求研制的一种MAV。其采用固定飞翼式布局,已发展了两代。图 2为1999年3月试飞第一代样机,外形酷似盘状飞碟。前置螺旋桨由微电机和锂电池驱动;具有空速、高度和航向保持能力;携带彩色摄像机,具有数据链路。其机翼展长15cm,可以11.2m/s的速度持续飞行33.4min。2000年8月试飞的第二代样机,机翼平面形状为八边形,如图 3所示。翼展15cm,起飞总重80g,能以速度12m/s续航30min。可装在手提公文箱内,总重6.8kg。

图2 第一代Black WidowFig.2 Black WidowI

图3 第二代Black WidowFig.3 Black Widow II
1998年4月,美国桑德斯公司、洛克希德·马丁公司和通用电器联合研制了“巷战杀手”Micro Star[6](图 4)。该MAV翼展15.24cm,总重约85g,巡航速度55km/h,续航时间大于20min,飞行高度5~91m。其微电子设备放置在机翼内,采用锂电池供电。机上装有重5g的差分GPS和惯性导航装置,具有自主导航和控制能力,可直接用手掷发射,并配备微型摄像机。
美国MLB公司研制的Trochoid(图 5)[7],由内燃机驱动,为飞行翼布局,翼展为20.32cm,飞行速度16~97km/h,能在较大风速下飞行18.5min。该微型飞行器前缘类似摆线,机翼上表面有一对呈“八”字的梯形立尾。

图4 Micro StarFig.4 Micro Star

图5 TrochoidFig.5 Trochoid
美国海军研究实验室(NRL)曾研制了一种MAV,名为MITE[8],用于实施电子干扰,其翼展约37cm,飞行速度10m/s,可续航30min。
美国弗罗里达大学研制的MAV(图 6)[9-12],采用柔性翼设计。该MAV最大翼展为15cm,以内燃机作为动力,可在飞行速度24~40km/h范围内续航15min,总重约52g,并携带摄像机和图像发射器。

图6 佛罗里达大学柔性翼MAVFig.6 Flex-wing MAV developed by University of Florida
南航研制的“翠鸟”号是基于MEMS微机电技术的国内首架可自主飞行控制、能实际应用的微型飞行器系统[13]。
2.3 微型旋翼飞行器
旋翼MAV主要有单旋翼带尾桨、共轴双旋翼、四旋翼以及涵道式等。
单旋翼带尾桨的旋翼MAV可称为微型无人直升机。比较有代表性的当属日本Tomy玩具公司的微型直升机“Heli-Q”[14](图 7)。机身全长约200mm,主旋翼直径达160mm,每次充电20min后可以飞行5min。其发动机由直流电池供电,通过无线遥控操纵。

图7 Heli-QFig.7 Heli-Q
2003年11月,日本的爱普生公司发布了一种共轴式双旋翼MAV,名为μFR-II[3](图 8),其直径13cm,高7cm,总重8.9g,采用超声波马达作为动力,电池供电电压3.5V,功率3W,通过无线蓝牙控制,配备摄像头,能实时监控目标。

图8 μFR-IIFig.8 μFR-II
在旋翼MAV研究中,还有一些机构试图研究尺寸更小的cm级MAV。德国的IMM公司于1997年研制了微型直升机Micro-helicopter[3],如图 9所示,其纵轴长24mm,高8mm,重0.4g,旋翼直径13mm。

图9 IMM公司的串列式双旋翼微型试验直升机Fig.9 Test Microcopter with tandem double rotor of IMM
斯坦福大学研究小组在NASA支持下设计的微型四旋翼飞行器“Mesicopter”是一种cm尺寸大小的微型直升机[3],机身为16mm×16mm的方型框架,有四个螺旋桨,如图 10所示,分别由直径3mm,重325mg的微电机驱动。

图10 斯坦福大学的“Mesicopter”Fig.10 Mesicopter of Stanford University
在国内,上海交通大学曾研制了一种旋翼直径14mm的双旋翼MAV[15],该飞行器长约18.8mm,高约4.6mm,重约0.11g,动力装置为电磁型微型电机,电机直径仅为2mm。
2.4 微型扑翼飞行器
扑翼MAV是一种采用仿生原理设计的飞行器。Microbat(图 11)是一款经典的扑翼MAV,由加州理工学院(Caltech)、Aero Vironment公司及加州大学(UCLA)共同研制[5]。Microbat由锂离子高能电池提供能源,通过微电机驱动机翼的扑动。经过4代样机的发展,该MAV总重量仅为11.5g,尺寸仅为20.32cm,可携带微型摄像机或声音传感器。2002年8月,该飞行器通过无线遥控方式飞行了22min45s。

图11 MicrobatFig.11 Microbat
美国加州大学伯克利分校(UC Berkeley)曾研制了一型MAV,称为微机械飞行昆虫MFI(Micromechanical Flying Insect)(图 12)[16],MFI的翅膀采用超薄聚酯制造,能像苍蝇一样扑翼和飞行,该MAV尺寸仅25mm,重量约为100mg。
英国剑桥大学、美国佐治亚理工大学(GTRI)与ETS实验室曾共同研制过计划用于火星探测飞行的Entomopter(图 13)[17]。该飞行器翼展为25.4cm,由4片机翼组成,通过一种往复式化学肌肉(Reciprocating Chemical Muscle,RCM)驱动。

图12 MFIFig.12 MFI

图13 EntomopterFig.13 Entomopter

图14 HummingbirdFig.14 Hummingbird
Aero Vironment公司在DARPA的支持下经过10余轮样机的试制,于2011年初成功研制出Nano Hummingbird微型飞行器(图 14)[18],该飞行器最大的特点是采用无尾翼设计,仅通过推进扑翼实现了悬停过程中的滚转、偏航和俯仰姿态控制,成功证明了无尾翼悬停飞行的可行性。Nano Hummingbird携带视频采集系统,重约19g,翼展约16.5cm,可悬停11min,前飞速度6.7m/s,续航时间约4min。
美国哈佛大学微机器人试验室在国家科学基金的支持下,采用MEMS技术于2011年成功研制了重量仅为125mg的微型机器蜜蜂(RoboBee)[19-21],如图 15,该MAV采用压电装置驱动,但尚不具备完全自主飞行的能力。

图15 RoboBeeFig.15 RoboBee
国内上海交通大学曾研究了翼展50mm~60mm的基于电磁和基于压电驱动的扑翼MAV方案[2,22]。南京航空航天大学曾制作了几种仿鸟扑翼飞行器[17,23],并于2002年首次试飞成功,其技术水平已与Microbat接近。
2.5 MAV的发展趋势
实用化是MAV发展的最终目标。目前,由于能源与动力装置、飞行控制、通信、导航设备与传感器等问题尚未得到很好解决,MAV离完全实用化还有一定的距离。
智能化是MAV发展的必然趋势。目前MAV尚无法达到全智能化的程度,还不具备自主飞行的能力,飞控技术和微型高精度导航系统仍有待发展,一方面研究新型控制方法,另一方面需提高设备精度、处理速度和微型化程度。随着这些技术问题的解决,各种具备自主飞行能力的MAV必将面世,再通过与各类传感器的一体化融合设计,其将在军民领域发挥重要的作用。
仿生是未来MAV的发展方向。由于固定翼在低Re数下遇到了低升阻比和不稳定的问题,人们将眼光聚焦于自然界当中,与MAV的Re数较为相当的鸟类和昆虫,这些生物的飞行方式是解决低Re数飞行问题的有效手段。同时,近几年,随着MEMS技术、智能材料等基础学科的发展,使得仿生扑翼MAV的研制成为可能。
同时,MAV的飞行控制是决定MAV能否真正走向应用的关键性问题,但其复杂性和重要性,决定了它将是MAV研究的长期热点。
3 MAV的系统构架
MAV主要由能源动力系统、通信系统、机体结构、控制系统、传感系统等功能模块组成,如图 16所示。
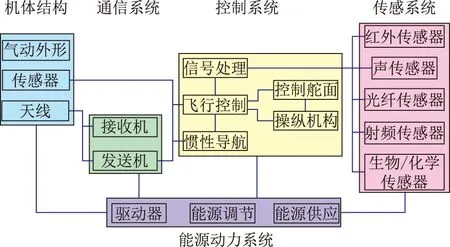
图16 MAV系统构架Fig.16 Architecture of MAV system
在MAV系统中各部分有其独特的作用,能源动力系统提供MAV动力以及各设备所需的能源。机体结构提供飞行器气动外型,并保证结构强度,使其稳定可靠的飞行。通信系统为MAV与主控平台之间建立联系,使其能够成功的执行命令,同时使操纵人员时刻掌握MAV的飞行信息。控制系统根据MAV获取传感信息,进行快速准确的处理并作出反应,对MAV的飞行姿态、速度、航线进行控制和定位。传感系统分析和采集来自外界的信息,通过采用各种传感器来实现MAV对外界环境信息的感知和探测。
4 MAV研制涉及的关键技术
MAV是一种新技术高度集成的飞行器,在MAV的研究中主要涉及以下关键性技术。
4.1 低雷诺数空气动力学
MAV与常规飞行器的空气动力学有很大的不同,常规飞行器的飞行Re约在106~108,其气动外形设计己趋于成熟。根据目前MAV特征尺寸15~25cm和飞行速度8~15m/s,其Re数约在104~105附近,边界层以层流为主且易出现分离现象,从而导致气动效率明显下降,且气动力的稳定性控制难度较大。
固定翼MAV,机翼边界层流态对气动姿态的非常敏感,微小的变化很可能导致边界层分离,造成升阻比大幅度下降;旋翼MAV,随飞行Re数的减小,其桨翼的气动效率也将降低;扑翼MAV的空气动力学发展最不成熟,飞行机理及其与结构参数的关系尚无公认规律,需深入探索。
从目前的研究方向和成果看,获得高升阻比的手段主要包括扰流片、微喷流控制、动壁效应等。但对于特征尺寸小于15cm的MAV,采用仿生力学的手段,将是更好的方式。
4.2 微型能源动力技术
微型能源动力装置是MAV的关键设备,也是目前最大的制约因素之一。
电池/电动机组是MAV最常用的一类动力装置,其体积可以做的很小,但能量密度较低,能量释放率也有待提高。
内燃式发动机是一种采用燃料的动力装置,其能量密度比电池高,但内燃式发动机的效率比较低,微型内燃机的热效率仅5%,功率密度最大仅1W/g,而且噪音大及可靠性差也是内燃式发动机需要解决的问题。
微型涡轮发动机是另一种有潜力的动力装置,主要有燃料发动机、喷气发动机等,但这类微型发动机在技术上还不够成熟。
4.3 机载设备MEMS技术
MAV机体内空间十分有限,可以携带的机载设备装置和有效载荷受到极大的限制。导航、飞控及传感探测系统是MAV中必不可少的重要设备。
导航控制系统中的高度计、陀螺、加速度计;飞控系统中的空速计、舵机;传感探测系统中的摄像机、声传感器、红外传感器、生化探测器等都需利用MEMS技术实现微型化设计,以更小的尺寸和重量来适应MAV。MEMS技术的发展将为MAV飞行控制、导航和传感系统的微型化和集成化提供基础。
4.4MAV飞行控制技术
MAV的飞控系统是MAV实现自主导航与控制的必要前提,其既要保证MAV的姿态稳定,使其有足够的升阻比维持巡航飞行,又能使其顺利完成各种飞行动作;此外MAV在飞行过程中易受湍流和阵风的干扰,因此飞控系统需具备良好的抗干扰能力和鲁棒性。
常规飞行器通过操纵各类舵面的偏转,利用气动力可以实现俯仰、偏航、滚转等姿态变化,而MAV的舵面尺寸小使得其气动效率很低,难以仅利用舵面偏转维持或改变飞行器的飞行状态。解决该问题的途径之一是发展新型控制方式,比如通过采用微喷流环量控制技术、利用仿生扑翼和柔性可变翼型等。
4.5MAV数据通讯技术
MAV在飞行过程中需要与地面基站进行图像视频、传感信息、控制命令等数据的实时传输,受体积和重量的限制,目前MAV主要采用微波通讯,但它传输距离有限且无法穿透墙壁。
作为MAV数据容量最大的通讯数据,图像视频信号传输所需的能源一般占MAV总能源的1/5,通过调节图像帧速率、采用可转向天线等方法可以减小数据传输消耗的能源,通过图像压缩、采用天线增益等方法,可以减小数据传输容量,加快传输速度、增大传输距离。
4.6MDO设计技术
MAV是一个多种功能子系统高度集成的复杂系统。针对多学科交叉的高度集成设计难题,传统的按单个学科或系统的研究及设计方法已不能适应,采用多学科设计优化——MDO(MultidisciplinaryDesignandOptimization)方法是研究MAV的有效途径,MDO方法能较好地统筹MAV的气动布局、能源、重量、控制、通信、导航、传感探测等各方面的要求。对MAV进行一体化的分析与设计。
5 发展建议
微型飞行器(MAV)作为高度集成的空中微智能传感探测系统是智能传感未来重要的发展方向,其在军事和民用领域都具有广阔的应用前景。
一方面,国外在MAV方面的研究开展较早且已具备一定的工程化水平,而国内的研究则启动较晚,发展较为缓慢,相关成果主要来源于高校的原理性基础研究工作,工程应用基本空白。因此,为加快国内MAV技术研究步伐,推动MAV工程化研制进程,建议专业从事军工产品研发和生产的科研院所应充分利用自身丰富的工程研制经验、先进的研发试验能力、成熟的科研管理体系等优良条件,同时大力牵引国内专业院校,发挥其理论优势,采用一体化设计理念,综合气动、控制、导航、传感测量、MEMS等专业技术,系统开展基础研究、关键技术攻关和工程产品研制。
另一方面,通过分析MAV的特点分类、发展现状及关键技术可以发现,旋翼MAV和扑翼MAV在微型化方面的潜力及可行性最为明显,可作为后续研究的主要技术方向,其中,扑翼MAV由于在空气动力学领域的研究仍存在较大瓶颈,机理还不清晰,缺乏相应的理论指导,研制难度较大,而旋翼MAV飞行机理与直升机较类似,控制理论较为成熟,工程可实现性较强,因此旋翼MAV可作为工程化研制的首选技术途径。同时,依托MEMS技术的发展,应加强MAV能源、导航、控制、传感、通讯等核心设备微型化、集成化的技术攻关和产品研发。
[1]DeathByAThousandCuts:Micro-AirVehicles(MAV)InTheServiceOfAirForceMissions[R].AU/AWC/2001-4,2001.
[2] 左德参.仿生MAV若干关键问题的研究[D]. 博士学位论文,上海交通大学,2007.
[3] 陈国栋,贾培发,刘 艳.MAV的研究与发展[J]. 机器人技术与应用,2006(02).
[4]GrasmeyerJM,KeennonMT.DevelopmentoftheBlackWidowMicroAirVehicle[R].AIAA-2001-0127.
[5]KeennonMT,GrasmeyerJM.DevelopmentoftheBlackWidowandMicrobatMAVsandaVisionoftheFutureofMAVDesign[R].AIAA-2003-2901.
[6]MicroSTARmicroairvehicledesigntoreality.BAESystems,2000.http://euler.aero,iitb,ac,in/docs/MAV/www.baesystems.com/microstar.pdf.
[7]MorrisSJ,HoldenM.Designofmicroairvehiclesandflighttestvalidation[C]//.ProceedingsoftheConference:Fixed,NappingandRotaryWingVehiclesatVeryLowReynoldsNumbers.UniversityofNotreDame,2000: 53-176.
[8]JamesKellogg,ChristopherBovais.TheNRLMiteAirVehicle[R].2001.ADA478713.
[9]YongshengLian,WeiShyy.Membranewingaerodynamicsformicroairvehicles[J].ProgressinAerospaceSciences39 (2003) 425-465.
[10]RobertoAlbertani,BretStanford.CharacterizationofFlexibleWingMAVs:eroelasticandPropulsionEffectsonFlyingQualities[R].AIAA-2005-6324.
[11]PeterG.Ifju,BretStanford,MikeSytsma.AnalysisofAFlexibleWingMicroAirVehicle[R],AIAA-2006-3311.
[12]BaronJohnson,DanielClaxton,BretStanford,VijayJagdale,PeterIfju.DevelopmentofaCompositeBendable-WingMicroAirVehicle[R].AIAA-2007-1044.
[13] 昂海松.MAV的概念与技术特点分析[C]//.江苏省航空航天学会飞行器专业委员会2007年学术年会,承德,1-Aug,2007.
[14] 陈彦博. 某新型微型旋翼飞行器的飞行控制系统设计[D]. 硕士学位论文,南京航空航天大学,2009.
[15] 肖永利,张琛. 基于2mm微马达的微型直升机设计与研制[J]. 高技术通讯,2001,82-84.
[16]SteltzE,WoodRJ,AvadhanulaS,FearingRS.CharactrtizationoftheMicromechanicalFlyingInsectbyOpticalPositionSensing[C]//.IEEERoboticsandAutomation,2005,1252-1257.
[17] 朱保利. 多自由度扑翼MAV设计研究[D]. 博士学位论文,南京航空航天大学,2007.
[18]MatthewKeennon,KarlKlingebiel,HenryWon.DevelopmentoftheNanoHummingbird:ATaillessFlappingWingMicroAirVehicle[R].AIAA-2012-0588.
[19]RobertJWood,BenjaminFinio,MichaelKarpelson.Challengesformicro-scaleflapping-wingmicroairvehicles[C]//.Micro-andNanotechnologySensors,Systems,andApplicationsIV,SPIE-2012-83731: 83731J.
[20]MichaelKarpelson,Gu-YeonWei,RobertJWood.Drivinghighvoltagepiezoelectricactuatorsinmicroroboticapplications[J].SensorsandActuators,2012,176(A):78-89.
[21]Pierre-EmileJDuhamel,N′estorO.P′erez-Arancibia.GeoffreyL.Barrows,andRobertJ.Wood.BiologicallyInspiredOptical-FlowSensingforAltitudeControlofFlapping-WingMicrorobots[J].IEEE/ASMETransactionsonEchatronics,2013,18(2):556-568.
[22] 蔡弘. 基于仿生学原理的微型特种机器人的研究[D]. 硕士学位论文,上海交通大学,2002.
[23] 曾锐. 仿鸟微型扑翼飞行器的气动特性研究[D]. 博士学位论文,南京航空航天大学,2004.
The Study on Aero Micro Intelligent Sensing and Detection System
BO Nan
(Beijing Institute of Automation Control Equipment,Beijing 100074,China)
The Micro air vehicle (MAV) as a kind of aero micro intelligent sensing and detection system is an important development direction of intelligent sensing technique. The development tendency of MAV is summarized with the investigation of feature,application,categories and evolution. Based on the system constitution of MAV,the key techniques are analyzed. Finally,the research proposal of MAV in the future is offered.
Intelligent Sensing;Micro Air Vehicle;MAV
2015 - 03 - 12;
2015 - 03 - 24。
柏楠(1982-),男,高级工程师,主要从事传感测量,空气动力学,导航与控制等方面的研究。
E-mail:andynan_bo@sina.com
TE27
A
2095-8110(2015)03-0034-09
