全面剖析TCA2003全站仪ATR功能原理及其应用
2015-03-10文道平
文道平
摘要:利用全站仪的ATR (Automatic Target Recognition)功能,能使测量工作自动化,从而提高测量效率。本文简单地介绍了全站仪自动目标识别功能ATR的原理与测量精度,结合生产实际情况讨论了ATR在工程应用中注意的一些问题,并根据实际经验提出了解决方法。
关键词:全站仪;ATR;精度;校准;应用
0 引言
徕卡TCA2003全站仪作为95年生产的一种现代化测量仪器,不仅测量精度高(标称测角精度±0.5″,边长1mm+1ppm×D),而且具有自动目标识别与跟踪功能即ATR功能(Automatic Target Recognition),可按照内置机载程序进行自动观测与记录,实现无人值守不间断观测,已在水电站大坝安全监测、岩土工程围岩变形测量等方面得到了广泛应用,使监控工作向三维、快速和高度自动化方向发展,成为安全分析和施工控制的最可靠依据之一,在测绘行业得到了普遍认可。但是人们在分享它那特殊功能时,可能对其工作原理、使用方法以及注意事项不甚完全了解,本文结合作者在实际工作中遇到的一些问题,并针对这些问题提出了相应的解决办法,旨在提高TCA2003全站仪或类似仪器的应用水平。
1 ATR工作原理
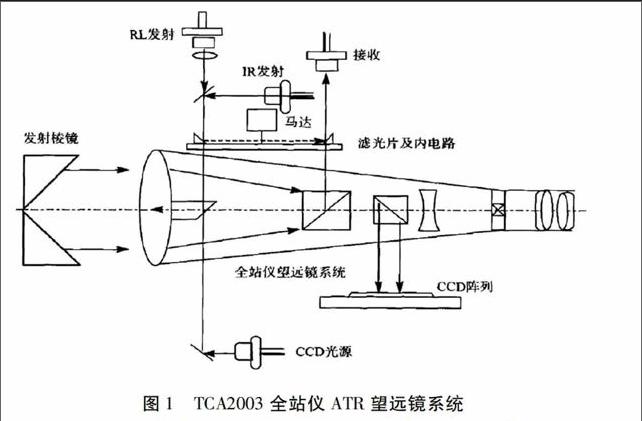
ATR功能部件被安装TCA2003全站仪的望远镜上。在打开ATR功能进行测量时,全站仪的CCD光源发射一束红外激光,经过仪器的光学部件多次反射处理后,与望远镜的视准轴同轴地发射出去,由目标棱镜反射回来并引导ATR光束至CCD阵列上,形成光点。光点位置以CCD相机的中心作为参考点来精确确定。如果望远镜的视准轴和CCD相机的中心是一致的,则使用ATR功能测得的角度值,可直接从CCD相机上光点的位置计算出来(如图1所示)。
在人工粗略照准目标棱镜使用内置机载程序开始ATR精密测量之后, ATR首先检查目标棱镜是否位于望远镜的视场内,如果在视场内找不到目标棱镜,它将在仪器设定的范围内进行螺旋式搜索,一旦探测到棱镜,搜索动作即刻停止,由马达驱动望远镜重复多次、最大限度地靠近棱镜中心,并测量棱镜中心与十字丝中心的偏离值,修正输出最终的水平角和垂直角测量值(如图1所示)。
图1 TCA2003全站仪ATR望远镜系统
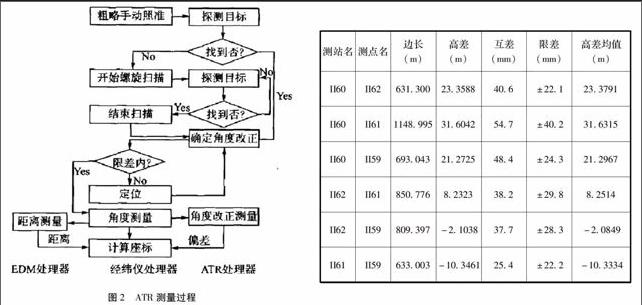
ATR精密测量过程包括搜索过程、照准过程和测量过程。在人工对目标棱镜进行粗略照准之后, ATR首先检查粗略照准的棱镜是否位于望远镜的视场内,如果它探测不到棱镜,它将进行螺旋式的搜索过程,一旦探测到棱镜,望远镜马上停止搜索,由马达驱动望远镜去接近棱镜的中心,并计算出十字丝中心与棱镜中心的偏移值,偏移值控制马达又一次驱使望远镜转动,使其更加接近正确的角度值位置。全站仪再次测量棱镜中心与十字丝中心的偏离值,并输出最终的水平角和垂直角测量值(如图2所示)。
2 ATR的测量精度
TCA2003全站仪ATR功能的测量精度分为内部精度和外部精度。内部精度与CCD阵列的分辨力、棱镜的位置、测量条件和测量时机等因素有关;而外部精度就是目标棱镜定位精度,它受棱镜型号和外部环境条件的影响较大。使用ATR自动目标识别功能进行水平角和垂直角测量时,其测量精度中包含有内部精度和外部精度。一般情况下,ATR的内部精度用户是无法测试的,厂家标定的精度指标主要是指外部精度。许多文献资料所检测的ATR精度主要是指外部精度,其结果基本能够达到仪器所标定的精度。
ATR的外部精度又分为两方面:
(1)测量距离在200m内,目标定位精度是一个固定值,如TCA2003全站仪,目标采用Leica圆棱镜,精密定位精度是±1mm;目标采用Leica360°棱镜,精密定位精度是±5mm。
(2)测量距离在200m外,目标定位精度与仪器标称测角精度是一致的,即TCA2003全站仪的测角精度±0.5″。
图2 ATR测量过程
3 ATR的校准
一般来说,所有的测量仪器都存在由于机械加工或安装问题而引起的误差,如垂直编码度盘指标差、水平视准差、水平轴倾斜误差及ATR准直差。这些误差可随时间和温度的改变而变化,因此在仪器第一次使用、精密测量前、长途运输后、长期工作后、温度变化大于20℃等情况下都需重新确定这些误差。
ATR的准直差指的是由于CCD阵列中心与望远镜视准轴不完全同轴所引起的误差,或者说是视准轴偏离CCD阵列轴在水平和垂直方向的分量。假如存在ATR准直差,则ATR方式判定的目标点就与视准轴瞄准的目标点有差异.也就是说十字丝可能较大地偏离棱镜中心,产生测角误差。
全站仪是高技术产品,特别像ATR这类仪器,既存在传统意义上的指标差、视准差,又存在着ATR方式的准直差。即使是有经验的测量员,也不可能通过调整分划板来协调仪器所有轴系的一致性了,因此目前解决此类机械误差的最佳办法是电子补偿,即测出相应的机械误差,改变误差符号并将其作为改正数对角度值进行修正,这就是校准。ATR校准的具体步骤可参见仪器使用手册。
ATR准直差的校准是提高测量精度的重要环节,在以下几种情况下都需要对仪器进行校准:
(1)在精密工程测量前,必须检测ATR准直差,特别是需要开展三角高程测量时。
(2)在测量过程中当环境温度条件变化较大时,亦应进行该项检测及其他误差检验。
(3)如果在测角时既使用ATR方式,又使用人工照准方式,必须先进行ATR校准。只有这样,两种方法观测结果才是正确的。
(4)人工精确照准100m处的棱镜,记下此时的角度值。转动望远镜偏离棱镜,然后使用ATR功能(按下DIST),检查此时的角度值,应与记下的一样,其差别如果大于2.1″(这里为 ,其中0.001m为标称定位精度),则需进行校准。endprint
在ATR的校准过程中,应分清下列两种情况:
(1)当盘左对准目标,利用SHIFT F4将仪器转到盘右时,如果十字丝偏离目标较大,这并不是ATR的问题,可通过校准仪器的2C差和指标差来解决。
(2)实际测量时,望远镜十字丝与棱镜中心存在一定的ATR偏移,正确的视准轴读数使用该偏移值来改正,但这种偏移值不能超过ATR棱镜定位精度。
4 对比实验
在水平角测量过程中,由于受共同的零方向观测值的差分计算,各个水平角观测值受ATR准直差的影响不大(在ATR准直差不影响棱镜定位误差的条件),不容易被发现。但在三角高程测量过程中,如不进行ATR准直差校准,其观测结果就有可能发生错误。
本工程事例是使用TCA2003按照内置机载程序进行三等三角高程测量,生产作业前工作人员未进行ATR准直差检测,其观测高差结果如表一(折光系数k取0.12,),对向观测高差均超出±0.035 的限差要求。
重新返工按照以下三种方式进行测量(仪器在使用前,均进行了三轴误差检验,检验合格后打开相应补偿器开关):
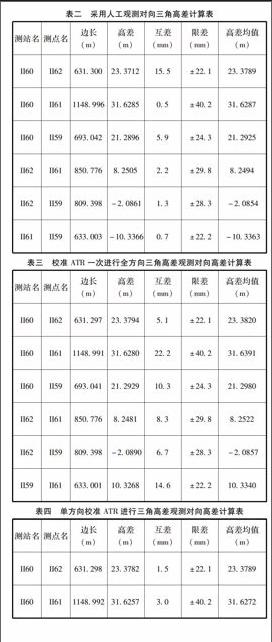
(1)人工观测;
(2)按照仪器说明书的方法进行ATR准直性校准,接受校准值进行自动测量;
(3)每个测站均进行单方向校准,即每个方向都进行ATR准直性校准,棱镜置于控制点上,并接受校准值分别进行各方向的自动测量。
三种观测方式其计算结果如表二~表四(k取值同前),从表中可以看出,人工观测和进行ATR校准后的自动观测结果对向观测高差较差均满足±0.035 的限差要求,且对向观测高差平均值(见表五)可有效消除ATR准直差这种系统误差的影响,但单向观测三角高差则包含这种仪器系统误差,在边坡监测、前方交会等工程单向观测三角高差时必须特别注意这点。
5 结束语
(1)ATR准直差的校准是提高测量精度的重要环节,特别是在进行三角高程单向测量时。如事先未进行ATR准直差的校准,其观测结果可能不正确,对向观测高差亦不能满足规范要求。
(2)由于ATR外部测量精度容易受棱镜型号和环境条件的影响,因此在进行高精度变形监测时应尽量使用徕卡圆棱镜,且TCA2003测量边长不宜小于200m。
参考文献
[1] 徕卡测量系统有限公司.Leica TPS-System1000操作手册.
[2] 朱顺平,薛英. ATR的工作原理、校准及检测[J].北京测绘, 2005, (3).endprint
