基于神经网络的城市停车需求预测模型
2015-03-10高健夫王培松
高健夫,王培松
(1.广州市市政工程设计研究总院,广东 广州510000;2.南京理工大学专利中心,江苏 南京210094)
近年来,经济发展态势稳定,国内汽车产业发展迅猛。然而,交通基础设施的建设速度落后于汽车保有量持续上升的速度,交通供给与交通需求之间的矛盾导致结构性交通拥堵问题在全球的许多大、中型城市蔓延,并日益成为许多城市社会经济发展的瓶颈。特别是,城市停车问题是居民出行面临的最首要的问题,在上海、广州、北京等地区,停车难问题已经作为城市交通拥堵的重点整治工程。
当前,国内外许多政府机构和学者针对城市停车问题进行了大量研究,并且已经取得了一定的成果。根据对文献的归纳可知,既有的城市停车问题研究主要包括城市停车需求、城市停车策略、城市停车区位等方面。国内,徐雷等根据停车目的的划分,提出了单车停车泊位需求系数计算方法,并在此基础上分别对居住地、工作地、访问地三大停车需求进行了测算,最后得出该方法能够较好地对城市停车需求进行评估,具有一定的实际操作性的结论;吴德华等在对比各传统常用停车需求预测方法优缺点的基础上,利用机动车增长率和停车需求之间的相关性,提出一种基于现状调查的停车需求预测方法和思路,分析表明该方法在预测可靠性、调查成本和预测停车分布的深度方面比传统的预测方法具有明显的优势。国外研究停车问题起步较早,美国交通工程师协会(ITE)定期更新出版《停车生成率》报告,提出91种不同用地性质的停车生产率指标。此外,国外还对交通需求管理等停车政策对交通需求的影响进行定性和定量研究,在此基础上对停车需求预测模型进行了修正和改进。
通过对既有研究成果的分析不难看出,对城市停车需求预测的研究主要集中在采用传统的“四阶段法”进行研究,其缺点是需要对城市交通现状进行大规模的调查,工作量较大。针对此问题,本文探讨了城市停车需求判别指标,采用机器预测方法BP神经网络对城市停车需求进行预测。
1 城市停车需求判别指标
城市停车主要是指为从事各种活动的社会车辆提供的停车服务。对于一个城市来说,判别停车需求的指标主要有总停车需求、公共停车需求、私人停车需求等,其具体含义如下:
1)总停车需求
总停车需求是指城市根据交通出行需求配建的提供车辆停留服务的交通基础设施被车辆占用的数量,其包括私人停车需求和公共停车需求,计算方法如下

式中:C1总停车需求,P城市总车辆出行量,ε停车系数。
2)公共停车需求
公共停车入口数是指城市提供给所有民众的停车服务基础设施中被车辆占用的数量,它没有停车权限限制,可供所有居民使用,计算方法如下

式中:C2公共停车入口数,β公共停车系数。
3)私人停车需求
私人停车需求是指城市提供给部分固定民众的停车服务的停车基础设施被占用的数量,它具有最高等级的停车权限,计算方法如下

式中:C3私人停车需求,其它参数含义同上。
2 城市停车需求神经网络预测
2.1 神经网络基本原理
人工神经网络起源于1943年美国心理学家W.McCulloch和数学家 W.Pitts提出的一个简单的神经元模型(MP模型),经过40多年的发展之后,Rinehart和McClelland团队于1986年提出一种按误差逆向传播算法训练的多层前馈型神经网络(Back Propagation Neural Networks,下面简称BP神经网络)。BP神经网络是通过模仿生物神经系统功能结构处理非线性问题的数学动力系统,对多输入与多输出的数据具有较良好的拟合能力,其基本组成单元是神经元,主要功能是将输入经过函数转化为期望输出。BP神经元模型预测机制主要通过三步实现:
Step 1.输入信息融合。
通过输入信息向量X= {x1,x2,…,xn}与其对应的权重向量W= {w1j,w2j,…,wnj}乘积得到融合之后的信息pj

Step 2.输出信息转化。
pj大于神经元兴奋阈值θ时,神经元信息转换函数f对pj转化得到输出信息yj,可采用Sigmoid函数作为转化函数

式中:表示前层第i个神经元和后层第j个神经元之间第k次修正权值,λ是动量因子,g是梯度误差修正函数。
式中:yj是输出信息;θ是阈值,通常用它来修正神经系统的内部偏差,取值0~1之间,通常建议取值0.01。
Step 3.误差反向传播。
根据得到的神经元输出信息yj与实际期望信息y*j之间的差值反向修正神经元权重wij,这里采用改进的自适应动量梯度下降法作为权值修正函数
2.2 停车需求预测模型
城市停车需求预测的原理是以停车场的总车辆入库数、公共车辆入库数、私人车辆入库数的时间序列数据为样本。因此,将时间节点作为输入条件,将总车辆入库数、公共车辆入库数、私人车辆入库数三个指标作为输出构建BP神经网络模型。依据Kolmogorov定理:一个具有n个输入单元、2n+1个中间单元和m个输出单元的三层网络可以精确地表达任何映射,并且同时可以使中间层容量和训练时间最优,所以确定建立1-3-2的BP神经网络,如图1所示。
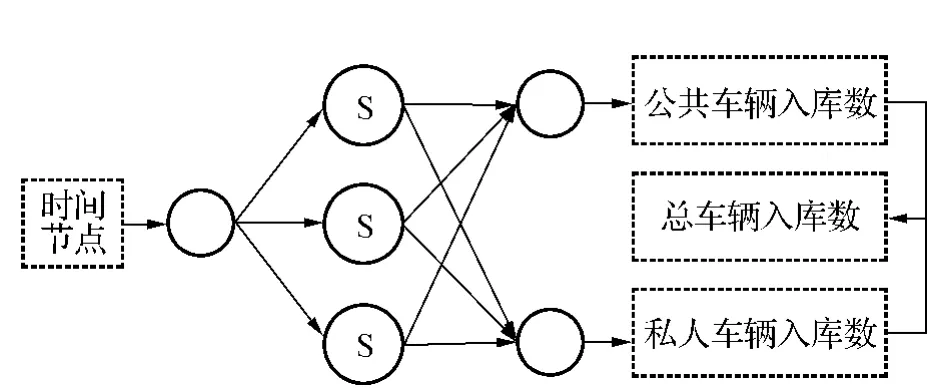
图1 基于BP神经网络的城市停车需求预测模型
3 实例分析
3.1 数据来源
为验证上述建立的基于BP神经网络的城市停车需求预测模型的有效性,以南京理工大学佛山市城市空间发展与规划课题组对于2014年9月—10月期间对佛山市部分停车场的周日早上7:30—10:30的停车情况的调查结果为作为实验数据,如表1所示。
3.2 仿真过程
基于上表1中的数据,采用matlab(R2012)软件实现BP神经网络预测模型编程,利用nntool建立的城市停车需求预测模型结果,如图2所示。
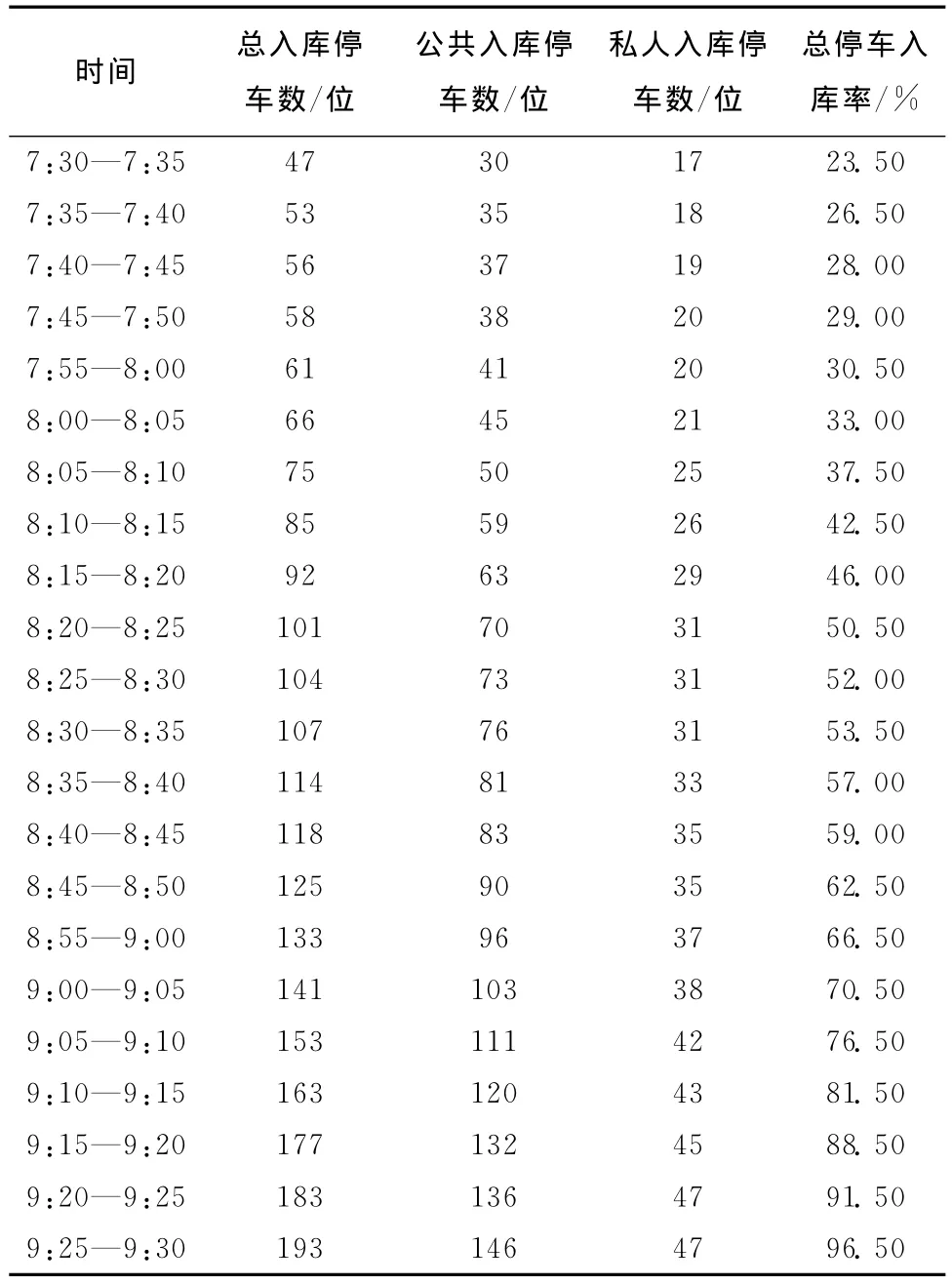
表1 佛山市某停车场停车情况调查结果
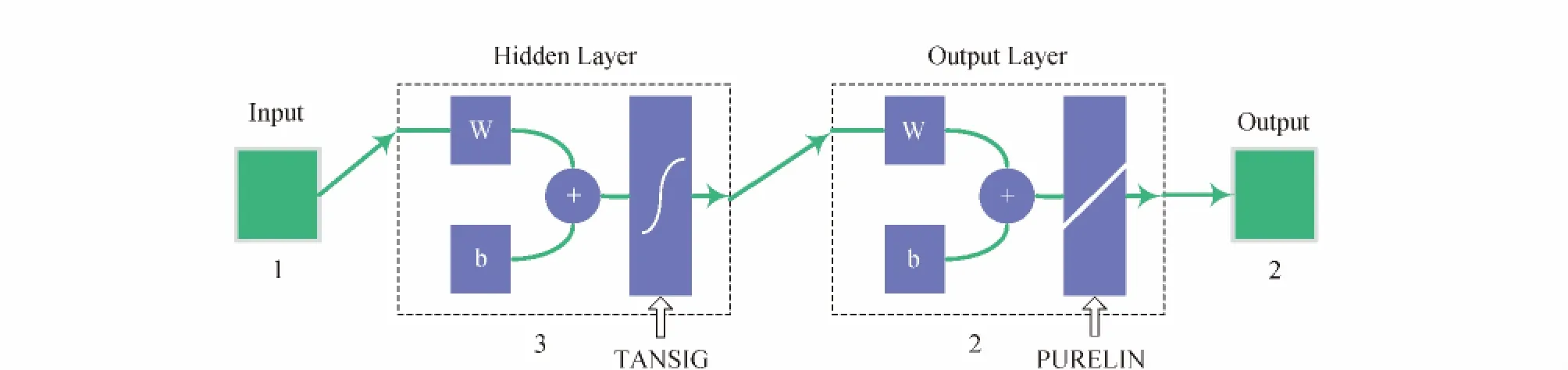
图2 基于NNTOOL工具箱建立的城市停车需求预测模型
在BP神经网络预测过程中,训练方法采用基偶对折法,即先以序列编号为基数的公共入库停车数和私人入库停车数作为训练样本预测序列编号为偶数的时间段公共入库停车数和私人入库停车数,然后再以序列编号为偶数的样本预测序列编号为基数项的时间段公共入库停车数和私人入库停车数,经过多次测试,最终得出预测效果最好的一组BP神经网络预测模型参数设定如表2所示。
在BP神经网络的训练过程中,数据样本被划分为训练型(Train)、检验型(Validation)、测试型(Test),这三组数据互不包含。BP神经网络首先根据训练型样本学习得出网络中各神经元之间的连接权重,然后将检验型数据代入训练好的网络模型中测算检验型数据的输出误差均方差(Mean Squared Error,简称 mse),当均方差保持一个连续下降步数的情况下,BP神经网络认为网络模型已经达到最优,可代入测试型样本进行训练,得出最后的预测结果。得到每个路段的仿真过程如图3所示。
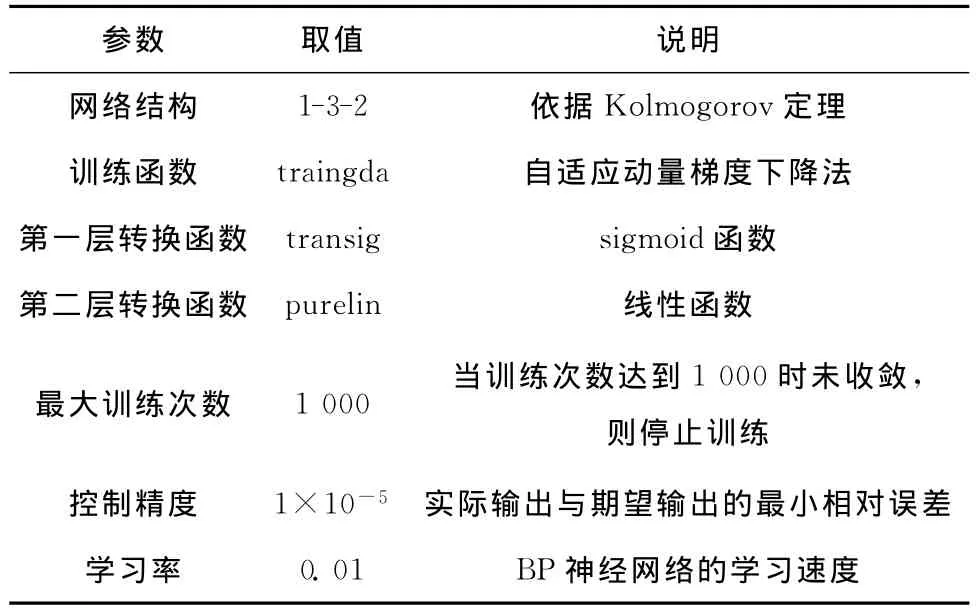
表2 BP神经网络参数设置
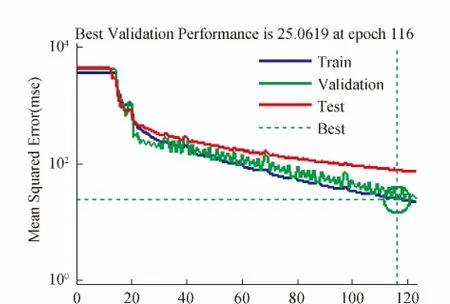
图3 BP神经网络训练过程
通过图3的分析可知,训练收敛在步伐116已经达到检验样本的输出误差均方差全局最小,最后得到预测结果如图4所示。
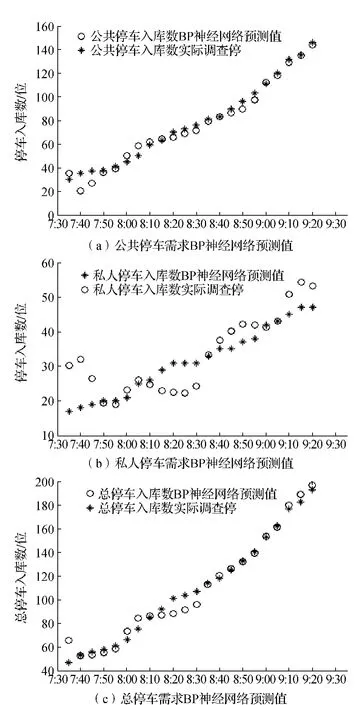
图4 BP神经网络预测结果
3.3 结果分析
为进一步分析BP神经网络在城市停车需求中的适应性和精度,将总停车需求、公共停车需求、私人停车需求的预测相对误差统计如表3所示。
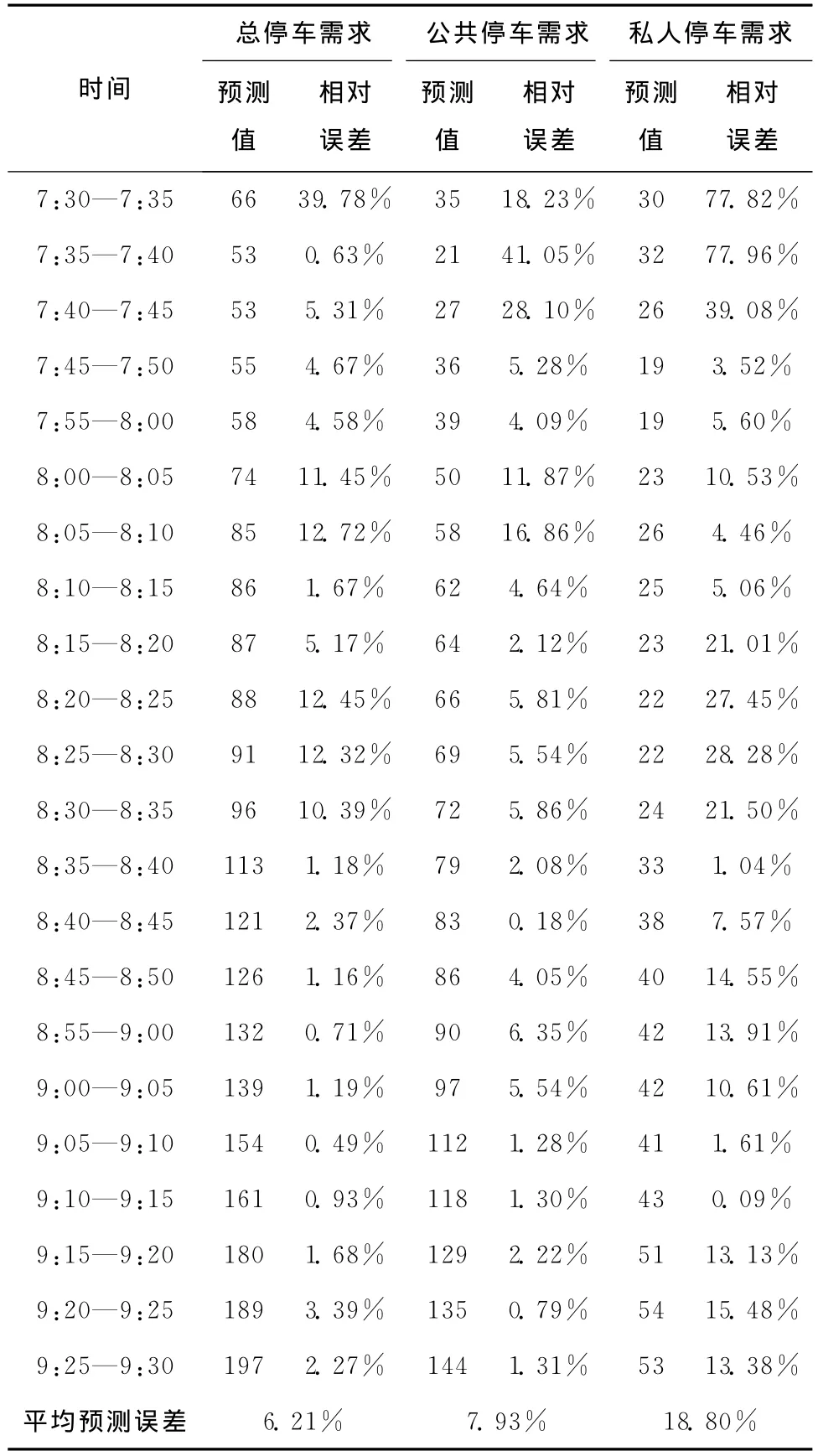
表3 基于BP神经网络的停车入库相对误差结果
通过对上表3的分析可知:
1)BP神经网络预测模型对每组数据的预测相对误差最大为18.80%,最小相对误差为6.21%,平均相对误差为10.98%。对于神经网络来说,一般预测精度保持在10%以内预测结果均良好,因此上述神将网络模型总体上基本符合预测精度要求;
2)BP神经网络预测模型对总停车需求量、公共停车需求量、私人停车入库的预测相对误差精度呈现从小到大的趋势,这主要是由于总停车需求量和公共停车需求量比私人停车需求量基数大,最后导致私人停车入库相对预测大;
3)BP神经网络在预测过程中第一组数据的预测相对误差较大,其中总停车入库的第一组数据的相对误差达到39.78%,公共停车入库的第一组数据的相对误差达到18.23%,私人停车入库的第一组数据的相对误差达到77.82%,其主要原因是由于本预测模型的第二隐层函数采用的是线性转换函数,线性转换函数对中间序列项回归效果较好,而对前序列项数据项回归效果稍差,但是对整体预测误差不产生影响。
4 结 论
本文主要针对当前城市停车需求热点问题进行了研究。首先,从停车的权限方面将城市停车划分为公共停车入库和私人停车入库两类,利用总停车需求量、公共入库停车数量、私人停车数量作为城市停车需求的判别指标。然后,建立了基于BP神经网络的城市停车需求1-3-2预测模型。最后,以佛山市某停车场作为实例,仿真结果表明BP神经网络预测模型对每组数据的预测相对误差最大为18.80%,最小相对误差为6.21%,平均相对误差为10.98%,符合预测精度要求。但是需要指出的是,本文仅单纯从城市停车数量与时间规律方面研究了城市停车预测问题,如何结合城市停车的内部机理,从时间和空间两个维度对城市停车需求预测,是下一阶段研究的重点。
[1] 徐雷,刘冰,张涵双.停车需求预测和泊位供给策略分析[J].交通科技与经济,2014,17(2):12.
[2] 吴德华.基于现状调查的城市老城区停车需求预测方法[J].交 通 运 输 系 统 工 程 与 信 息,2013,14(1):235-241.
[3] Wei L,Chou Y,Chang C.The research on improved parking generation rate forecast model[J].JOURNALHEBEI UNIVERSITY OF TECHNOLOGY,2007,36(5):101.
[4] Ferguson E.Zoning for parking as policy process:A historical review[J].Transport Reviews,2004,24(2):177-194.
[5] Rye T,Ison S.Overcoming barriers to the implementation of car parking charges at UK workplaces[J].Transport Policy,2005,12(1):57-64.
[6] Howard C K,Cayetano K,Omojola O.Parking management systems:U.S.Patent 6,885,311[P].2005-4-26.
[7] 魏海坤.神经网络结构设计的理论与方法[M].北京:国防工业出版社,2005.
[8] Haykin S S,金世伟.神经网络原理[M].北京:机械工业出版社,2004.
[9] Razavi B S.Predicting the Trend of Land Use Changes Using Artificial Neural Network and Markov Chain Model(Case Study:Kermanshah Urban)[J].Research Journal of Environmental and Earth Sciences,2014,6(4):215-226.
[10]Yue H.BP Neural Network[J].Information Technology Journal,2013,12(19):5401-5405.
[11]鲁娟娟,陈红.BP神经网络的研究进展[J].控制工程,2006,13(5):449-451.
