SAR舰船检测算法对比分析研究
2015-03-10陈利民杨学志张晰郎海涛孟俊敏
陈利民,杨学志,张晰,郎海涛,孟俊敏
(1.合肥工业大学计算机与信息学院,合肥230000;2.国家海洋局第一海洋研究所,山东青岛266100)
SAR舰船检测算法对比分析研究
陈利民1,2,杨学志1,张晰2,郎海涛2,孟俊敏2
(1.合肥工业大学计算机与信息学院,合肥230000;2.国家海洋局第一海洋研究所,山东青岛266100)
为了满足快速准确地检测舰船目标的社会需求,该文利用SAR和地面实测数据,开展了K分布恒虚警率、G0-CFAR、双参数CFAR、小波变换以及最佳熵双阈值等经典SAR舰船检测算法的对比分析研究,给出了各种SAR舰船检测算法的准确度、运行速度及适用范围(分辨率、海况),为SAR舰船检测的业务化应用提供指导。
SAR;舰船检测;对比分析;海洋测量定位
1 引 言
我国是一个海洋大国,大陆海岸线18000多公里,管辖300多万平方公里海域,海洋资源丰富,但当前我国海洋维权形式十分严峻,个别国家的船舶非法进入我国管辖海域进行测量、监听等非法活动,严重威胁并损害着我国的海洋安全和海洋权益。因此,加强对非法进入我国管辖海域的船舶监视监测具有十分重要的意义。
合成孔径雷达(SAR)是一种高分辨率的微波成像传感器,具有全天时、全天候的观测能力[1],是主要的海洋遥感手段之一,在监视海运交通、维护海洋权益、提高海防预警能力等方面有着广阔的应用前景。
近年来,各国研究人员开展了大量的SAR舰船检测研究工作,提出和发展了很多算法,如恒虚警率(Constant False Alarm Rate,CFAR)检测算法;加拿大商用软件OMV[2]使用K-CFAR进行舰船检测;Waterman C C等[3]使用双参数CFAR对SAR图像进行检测;Kapur J N等[4]将信息论中的熵引入图像分割,提出了最佳熵双阈值检测算法;Tello M等[5-7]使用小波变换来检测舰船目标;张风丽等[8]提出了基于小波变换和相关运算结合的舰船目标检测算法;鲁统臻等[9]提出了利用G0分布对海杂波建模的舰船检测算法;Ringrose R等[10]利用多极化特性进行舰船目标检测。
国内外学者提出和发展了许多舰船检测算法,但对于这些算法性能的对比分析研究工作开展得较少。种劲松等[11]分析研究了K-CFAR算法与双参数CFAR算法的特点;Xi Zhang等[12]分析研究了CFAR与小波变换算法的特点,但是对比分析研究的算法较少,应用的遥感卫星数据较单一,且没有考虑各个算法的检测效率。为了满足SAR舰船检测海洋业务化应用的需要,本文需针对K-CFAR、G0-CFAR、双参数CFAR、小波变换和最佳熵双阈值等常见舰船检测算法的检测效果及检测效率的性能开展对比分析研究,为SAR海洋舰船实时监视监测提供指导。
2 SAR舰船检测算法介绍
2.1 K-CFAR舰船检测
K分布能够很好地描述海杂波的长拖尾现象[13]。SAR图像观测强度x的K分布概率密度函数[14]如式(1)所示。

其中,μ为均值,υ为形状参数,L为SAR图像视数,Γ()为Gamma函数,Kυ-L为υ-L阶修正的Bessel函数。
其中,xi,j为图像(i,j)处的观测强度值,M和N分别为图像的高度和宽度。
K分布的形状参数υ、均值μ和统计方差σ2之间的关系为:

联合式(2)、式(3)和式(4)可以求出形状参数υ。
求解虚警概率方程式(5)得到检测阈值T,式中pfa为虚警概率。

最后根据得到的阈值T,判断待检测的像素xi,j是否为目标像素。若xi,j>T时,判为目标像素,否则判为背景像素。
2.2 G0-CFAR舰船检测
G0分布是一种用于图像建模的乘积模型,由Ferry等[15]提出。其概率密度函数表达式为:

其中,n为等效视数,α为形状参数,γ为尺度参数。其参数估计表达式[16]如下:
其中ψ()为digamma函数,xi,j为(i,j)处的像素值,联合式(7)、式(8)、式(9)和式(10)估计G0分布的等效视数n、形状参数α和尺度参数γ,将得到的各个参数代入到概率密度中,得到概率密度函数并求解虚警概率方程式(11),得到检测阈值T。

根据得到的阈值T,判断待检测的像素xi,j是否为目标像素。若xi,j>T时,判为目标像素,否则判为背景像素。
2.3 双参数舰船检测算法
双参数CFAR是基于海杂波服从高斯分布假设的,高斯分布能够很好地适应海杂波的变化[13-17],是较早应用于舰船检测的算法之一。在双参数CFAR检测中需要设置3个窗口:目标窗口、保护窗口、背景窗口,其中目标窗口是为了统计舰船目标,保护窗口是为了防止目标信息泄露到背景窗口中,从而造成背景统计误差,背景窗口是为了统计海杂波。窗口尺寸大小则根据经验和实际SAR图像分辨率等信息确定,一般情况下,目标窗口应该和检测的舰船目标的最小长度相同。保护窗口应该与要研究的舰船目标的最大长度相同。背景窗口应足够大,才能保证不受其他目标或非背景等因素的影响,从而很好地估计背景统计值。假设T为目标窗口,B为背景窗口,μT为目标窗口内的统计均值,μB和σB分别为背景窗口内像素的统计均值和统计标准方差。设置一个虚警概率常数t,根据目标检测准则[18]:

依据上式依次处理每一个像素点,若上式成立,则判当前像素为舰船目标,否则判为背景像素。
2.4 小波变换检测算法
在SAR舰船中,近年来有学者使用小波变换做舰船检测[5-7]。由于海杂波、相关斑噪声等信息在SAR图像是随机分布的、没有一定的规律可循,而舰船在SAR图像中具有一定的特性,且具有一定的规律可循。在小波变化中,SAR图像的舰船目标在每一个小波子带的频率成分中是确定性的,而不同小波子带的噪声却是去相关的,正因为如此,可以用小波变换对检测区域的SAR图像做变换,然后利用相关运算突出舰船目标,抑制噪声,从而检测出舰船目标。
2.5 最佳熵双阈值算法
最佳熵双阈值算法由KapurJ N等在1985年提出,他们将信息论中的Shannon的概念应用于图像分割领域,找出使得目标和背景信息之和最大的值,并以此为阈值对原图像进行分割,本文采用的是双阈值算法[4]。假设图像的灰度范围为{0,1…N-1},T1、T2(T1<T2)将图像分为3类,则每类的概率分别是其 中是灰度级i出现的概率。根据Shannon熵的定义,3类的熵分别为:
则图像的总熵为:

根据式(16)求出最佳阈值T1、T2,使得熵H取得最大值。然后遍历图像的每一个像素点xi,j,若xi,j>T2则判为目标,否则判为背景像素。
3 SAR舰船实测数据
为了开展SAR舰船检测算法对比研究,本文开展了3次SAR舰船探测实验,地面同步数据为星载SAR过境前后实验区域舰船信息。如图1及表1所示。
4 实验结果及分析

其中,Ntt为检测结果中正确的检测目标数,Nfa为虚警目标数,Ngt为实际的目标数,舰船实际目标数是结合现场收集到的舰船信息分析得到的,因此舰船实际数目具有很高的准确性,提高了评价的客观性。对于3种CFAR算法的概率模型特性不同,涉及到的虚警率设置,本文均根据实验结果选择最佳的虚警率,使得最优的检测结果进行对比分析。
4.1 ENVISAT-ASAR
实验获得ENVISAT-ASAR图像的大小为8461×9957,为了研究处理方便,本文对ENVISAT ASAR图像选取436×458大小进行实验。
检测结果见图2,表2列出了5种算法对ASAR图像的检测效果及运行时间。表2可以看出对于中等分辨率高海况的ENVISAT ASAR图像,K-CFAR、G0-CFAR、双参数CFAR的品质因数均很高,但是双参数CFAR检测的结果丢失了舰船的轮廓信息,不利于开展后续的类型识别工作。小波变换和最佳熵双阈值均存在虚警和漏检目标的现象,主要由SAR的目标/背景的对比度较低造成的。从检测效率上看,小波变换的检测效率最高,G0-CFAR最低。综合品质因数、检测效率及后续类型识别工作的开展,对于中等分辨率的ENVISATASAR图像,K-CFAR能够高质量、高效率地检测目标。
4.2 Radarsat-2SAR
实验获得Radarsat-2图像大小为9553×8182,为了研究处理方便,本文对Radarsat-2图像选取图像中的一块2400×2100大小进行实验。
检测结果见图3,表3列出了5种算法对Radarsat-2SAR图像的检测效果及运行时间。由于本次实验的烟台海域渔船出没较多,船只虽然较多,但是船长都较小,在分辨率为8m的SAR图像上呈现的也仅仅是亮点,这一点从AIS数据上也得到了验证。
首先对获得的SAR图像做几何校正和陆地掩膜等预处理。本文方法实现环境为Inter(R)Core(TM)2,2.83GHz,内存2G,Windows XP操作系统,运行软件为MATLAB 7.1。为了评价各个算法的检测性能,本文引入品质因数FOM[19]和检测时间,品质因数评价检测效果,检测时间评价检测效率。检测的品质因数FOM定义如下:

图1 ENVISAT ASAR、Radarsat-2、TerraSAR-X图像及其实测数据分布

表1 3次SAR舰船探测实验

图2 ENVISAT ASAR图像及检测结果(红色三角形表示虚警目标,红色圆圈表示漏检目标)
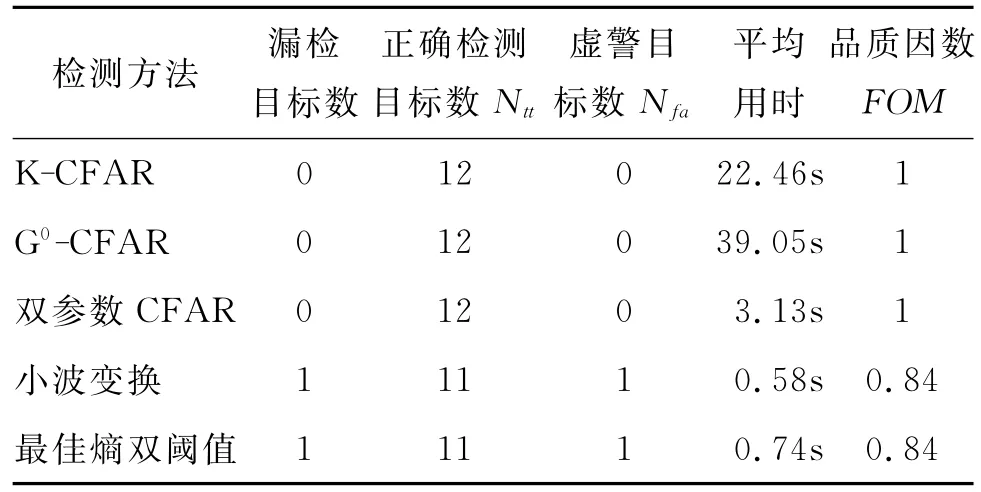
表2 5种算法对ASAR图像检测指标
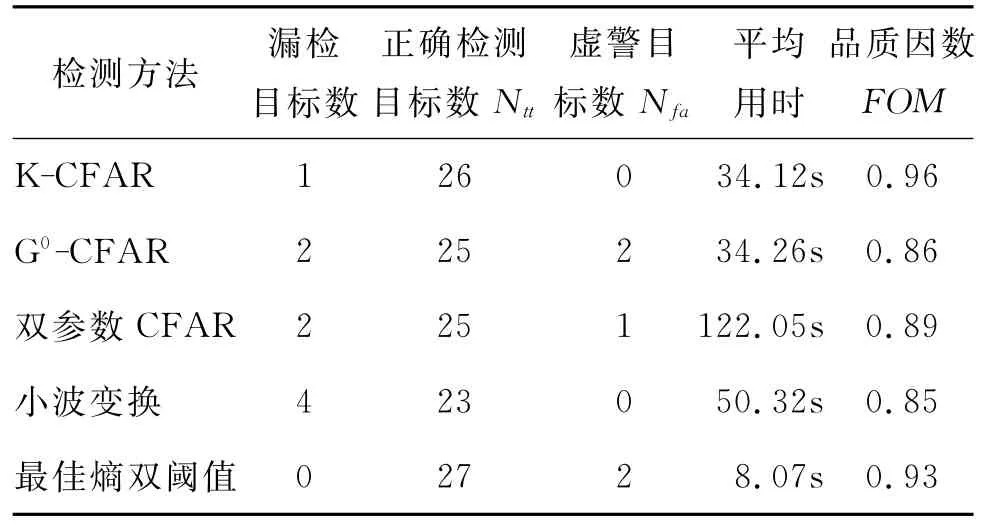
表3 5种算法对Radarsat-2SAR图像检测指标
表3可以看出,对于高分辨率的Radarsat-2 SAR图像,5种算法的检测效果都比较好,K-CFAR的品质因数最高,达到0.96,其次是最佳熵双阈值,再次之是G0-CFAR与双参数CFAR,小波变换最差。从检测效率上来看,双参数CFAR耗时是最多的,G0-CFAR与K-CFAR耗时相差不多。本次实验的SAR图像较大,为2400×2100,双参数CFAR是基于窗口滑动的,每一次滑动都要进行建模计算,因此耗时较多。虽然K-CFAR的品质因数要优于最佳熵双参数,但是在平均耗时上最佳熵双参数仅是K-CFAR的23%,且不存在漏检现象。因此,综合检测的品质因数以及检测效率,对于Radarsat-2 SAR而言,最佳熵双阈值算法能够达到较好、较快地检测目标。
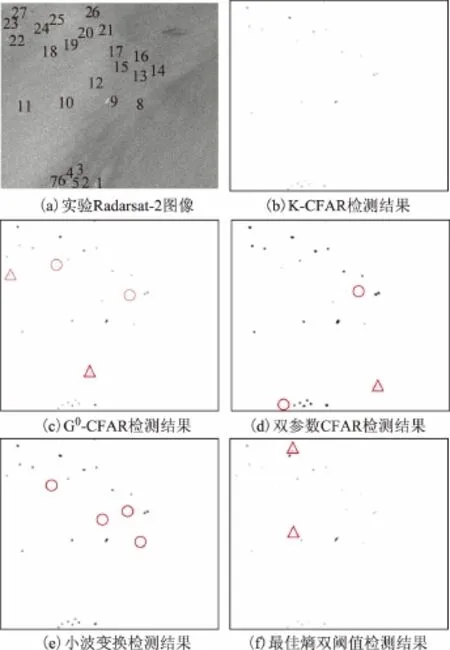
图3 Radarsat-2SAR图像及检测结果(红色三角形表示虚警目标,红色圆圈表示漏检目标)
4.3 TerraSAR-X
实验获得TerraSAR-X图像的大小为12939× 20486,为了研究处理方便,本文选取TerraSAR-X图像中的一块2400×2100大小进行实验。

图4 TerraSAR-X图像及检测结果(红色三角形表示虚警目标,红色圆圈表示漏检目标)
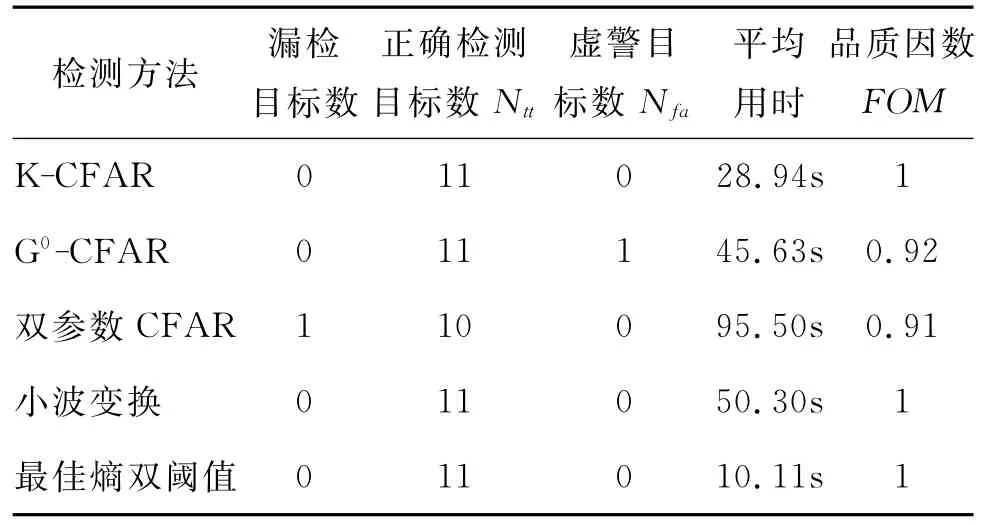
表4 5种算法对TerraSAR-X图像检测指标
检测结果见图4,表4列出了5种算法对TerraSAR-X图像的检测效果及运行时间。表3可以看出,5种检测算法对高分辨TerraSAR-X图像的检测效果都比较好,K-CFAR、小波变换、最佳熵双阈值的品质因数均为1;G0-CFAR和双参数CFAR的品质因数分别为0.92、0.91,而且K-CFAR、G0-CFAR、最佳熵双阈值都很好地保持了舰船的轮廓信息。从检测效率上来说,K-CFAR、G0-CFAR、双参数CFAR、小波变换、最佳熵双阈值平均用时分别为28.94s、45.63s、95.50s、50.30s、10.11s,很明显最佳熵双阈值效率最高。因此综合检测效果和检测效率两方面因素,对于高分辨率的TerraSAR-X图像而言,最佳熵双阈值能够快速地、准确地、高质量地检测舰船目标。
5 结束语
本文结合3次SAR舰船实验,分别采用KCFAR、G0-CFAR、双参数CFAR、小波变换以及最佳熵双阈值对SAR图像进行舰船目标检测。并采用GPS或AIS设备同步收集SAR卫星过境前后的舰船信息,得到SAR图像中舰船的实际数目以及实际分布等信息,为评价检测效果的品质因数提供信息,保证了评价的客观性。另外,在同样的硬件条件下,着重分析了各算法检测效率,检测的效率与检测算法的复杂度、实验图像大小、不同的SAR图像等密切相关。综合实验结果对比分析,可以得出以下结论:
(1)对于中等分辨率、目标/背景对比度较低的SAR图像,K-CFAR算法能够很好地进行目标检测,且能够很好地保持舰船的轮廓信息,有利于后续工作的开展。
(2)对于高分辨率、目标/背景对比度较高的SAR图像,最佳熵双阈值能够快速高效地检测舰船目标。
综合检测准确度和检测效率,在海洋业务化应用中,对于低中等分辨率高海况SAR建议采用KCFAR进行目标检测,对于高分辨率低海况SAR建议采用最佳熵双阈值进行目标检测。今后如何在保证目标检测效果的前提下,发展高效率的检测算法,使得SAR在海洋舰船目标检测上达到实时监测的能力将是舰船检测研究的重点。
[1] 宋建设,郑永安,袁礼海.合成孔径雷达图像理解与应用[M].北京:科学出版社,2008.
[2] VACHON P W,EDEL H R,HENSCHEL M D,et al.Validation of ship detection by the RADARSAT synthetic aperture radar and the ocean monitoring workstation[J].Canadian Journal of Remote Sensing,2000,3(26):200-212.
[3] WACKERMAN C C,FRIEDMAN K S,PICHEL W G,et al.Automatic detection of ships in RADARSAT-1SAR imagery[J].Canadian Journal of Remote Sensing,2001,5(27):371-378.
[4] KAPUR J N,SAHOO P K,WONG A K C.A new method of gray-level picture thresholding using the entropy of the histogram[J].Computer Vision,Graphics and Image Processing,1985,2(29):273-285.
[5] TELLO M,LOPEZ-MARTINEZ C,MALLORQUI J.A novel algorithm for ship detection in SAR imagery based on the wavelet transform[J].IEEE Geoscience and Remote Sensing Letters,2005,2(2):201-205.
[6] TELLO M,LOPEZ-MARTINEZ C,MALLORQUI J.Automatic vessel monitoring with single and multidimensional SAR images in the wavelet domain[J].ISPRS Journal of Photogrammetry&Remote Sensing,2006,61(3):260-278.
[7] 张晰.星载SAR舰船目标探测实验研究[D].青岛:中国海洋大学硕士学位论文,2008.
[8] 张风丽,吴炳方,张磊.基于小波分析的SAR图像船舶目标检测[J].计算机工程,2007,33(6):33-34.
[9] 鲁统臻,张杰,纪永刚,等.基于G0分布的高海况SAR船只目标检测方法[J].海洋科学进展,2011,2(29):186-195.
[10] RINGROSE R,HARRIS N.Ship detection using polarimetric SAR data[R].In CEOS SAR Workshop 2001,1999:687-692.
[11] 种劲松,朱敏慧.SAR图像舰船目标检测算法的对比研究[J].信号处理,2003,19(6):580-582.
[12] ZHANG X,ZHANG J,JI Y G.Comparison and evaluation of ship target detection algorithms with SAR images[C].European Space Agency,(Special Publication)ESA SP,Proceedings of SeaSAR 2008(EI).
[13] 种劲松.合成孔径雷达图像舰船目标检测算法与应用研究[D].北京:中国科学院研究生院博士学位论文,2002.
[14] CHRIS O,SHAUN Q.Understanding synthetic aperture radar images[M].London:Artech House Inc,1998.
[15] FRERY A C,MULLER,YANASSE C C F,et a1.A model for extremely heterogeneous clutter[J].IEEE Trans OnGRS,1997,35(3):648-659.
[16] 时公涛,高贵,周晓光,等.基于Mellin变换的G0分布参数估计方法[J].自然科学进展,2009,19(6):677-690.
[17] NOVAK L M,HALVERSEN S D,OWIRKA G,et al.Effects of polarization and resolution on SAR ATR[J].IEEE Trans on Aerospace and Electronic Systems,1997,33(l):102-115.
[18] IRVING W W,NOVAK L M,WILLSKY A S.A multiresolution approach to discrimination in SAR imagery[J].IEEE Trans.Aerospace and Electronic Systems,1997,33(4):1157-1169.
[19] NOEL R.Ship surveillance using RADARSAT ScanSAR images[C].Ship Detection in Coastal Waters Workshop 2000,NS,Canada,31May,l&2June,2000:41-45.
Comparative Analysis on SAR Ship Detection Algorithms
CHEN Li-min1,2,YANG Xue-zhi1,ZHANG Xi2,LANG Hai-tao2,MENG Jun-min2
(1.School of Computer and Information,Hefei University of Technology,Hefei 230009;2.First Institute of Oceanography,State Oceanic Administration,Qingdao 266100)
Rapid and accurate detection of ship targets is an important requirement of the operational applications of SAR imagery,and real-time monitoring of marine targets is of great significance.This paper uses the SAR and ground truth data to carry out the comparative study of K-CFAR,G0-CFAR,two-parameter CFAR,wavelet transform,maximum entropy dualthreshold and other SAR ship detection algorithms,and gives the performance,speed and scope of application(resolution and situation of sea),which can provide the guidance for marine operational applications of SAR ship detection.
SAR;ship detection;comparative analysis;marine positioning
10.3969/j.issn.1000-3177.2015.02.018
TP751.1
A
1000-3177(2015)138-0099-07
2012-12-25
2014-02-06
海洋公益性科研专项项目(200905029);国家自然科学基金(61002048)。
陈利民(1987~),男,硕士,研究方向为海洋遥感与图像处理。
E-mail:minlichen@163.com
张晰(1981~),男,博士,研究方向为SAR海上目标探测。
E-mail:xi.zhang@fio.org.cn
