一种平面二自由度并联机器人速度性能与运动学参数关系研究
2015-03-09王冰聂旭萌韩书葵
王冰,聂旭萌,韩书葵
(北华航天工业学院机电工程学院,河北廊坊 065000)
一种平面二自由度并联机器人速度性能与运动学参数关系研究
王冰,聂旭萌,韩书葵
(北华航天工业学院机电工程学院,河北廊坊 065000)
以一种平面二自由度并联机器人为研究对象,在已有机构的基础上,对其进行了改进,提出了一种具有较小运动惯量且可实现运动平台平动的新型平面二自由度并联机器人机构。不同于已有的研究方法,综合考虑了机器人的输入和机构尺寸作为机器人运动学参数,应用空间模型理论建立了机器人机构的设计空间。在设计空间内计算机器人全域速度性能指标,绘制了机器人速度性能图谱,在此基础上探讨了机器人速度性能与运动学参数之间的关系。结果表明:速度极小值ηvmin和速度极大值ηvmax随r1的增大而减小,即r1越小,速度性能越好;随r2的增大而增大,即r2越大,速度性能越好;在0<r1≤1.5且0.7≤r2<1.5的区域内ηvmax和ηvmin值较大,机器人具有很好的速度性能。速度性能图谱有助于该机器人机构的性能评价与优化设计。
并联机器人;设计空间;性能图谱;速度
0 前言
平面二自由度并联机器人是机器人家族中的重要一员,因其可实现平面内任意轨迹,且具有相对简单的结构,吸引了很多学者的研究兴趣。但以往的平面二自由度并联机器人的末端输出多为平面内的一个点,而很多时候希望机器人的末端为运动平台的平动。为了解决上述问题,刘辛军等[1]提出一种移动副驱动,支链中含平行四边形机构的平面二自由度并联机器人机构,由于平行四边形机构的存在,机器人运动平台可实现平面内平动,但该机器人具有较大横向尺寸。为了减小此类机器人的横向尺寸,李秦川等[2]提出一种交叉型平面二自由度并联机器人机构,其将两个支链的平行四边形机构交叉铰接在机器人运动平台的两端。上述发明的新机构都是将两支链中的平行四边形机构铰接在运动平台的两端,这样机器人的运动平台的几何尺寸会较大,相应的质量和运动惯量会很大,不利于机器人实现高速作业任务。
在机器人机构性能评价与优化设计方面,由于机器人机构几何尺寸是具有不同量纲且是由零到无穷变化的变量,因此如何有效的建立机器人机构性能与机构尺寸之间的关系,一直是一个难点问题。空间模型理论[3-4]的提出,使这个问题迎刃而解,使在量纲为一且有限的空间内探讨机器人机构性能与尺寸关系成为可能。但机器人机构的性能不仅仅取决于机器人机构的几何尺寸,其也和机器人的输入变量的变化范围关系密切,因此如何综合考虑机器人的输入与机构几何尺寸,来综合评价机器人机构性能是一个新的研究问题。
文中在已有平面二自由度并联机器人机构的基础上,对其进行了改进,提出一种具有较小运动惯量可实现运动平台平动的新型平面二自由度并联机器人机构。综合考虑机器人输入和机构几何尺寸作为机器人运动学参数,进一步发展了空间模型理论,建立了机器人的设计空间。在此基础上探讨了机器人全域速度性能与运动参数之间的关系,绘制了其速度性能图谱。
1 位置与速度分析
文中研究的平面二自由度并联机器人的机构简图如图1所示,其为对称结构,含有两条相同的支链,每一支链均由一驱动滑块和一平行四边形机构串联组成。图中构件3为机器人机构的固定平台,在固定平台上建立固定坐标系xoy,构件B1B2为机器人的运动平台,在其上建立运动坐标系x'o'y'。构件1和2为机器人机构的驱动滑块,A1A3B2B1和A2A4B1B2分别为两个支链的平行四边形机构。由于平行四边形机构的存在,运动平台可实现平面内的二维平动;因为两个支链的平行四边形机构在运动平台处交叉铰接在一起,所以该机器人的运动平台将具有较小的几何尺寸及较小的运动惯量。

图1 平面二自由度并联机器人机构

由式 (2)可见,该机器人位置正解有两组解,由于该机器人奇异的存在,这两组解不能同时存在,在图1所示的固定坐标系下,应选取“-”模式。将式 (1)对时间取导数,可得机器人的速度方程为

当矩阵A的行列式为零,或矩阵B的行列式为零,或它们同时为零时,该机器人将处于奇异位形,其奇异位形如图2和3所示。

图2 机器人的第一种奇异

图3 机器人的第二种奇异
机器人只有在远离奇异位形时才能正常工作,由奇异分析图2和3可见,该平面二自由度并联机器人在正常工作时,其驱动滑块行程与机器人机构几何尺寸应满足如下关系式

式 (8)建立了机器人驱动滑块行程与机器人几何尺寸之间的联系,这使得综合考虑机器人输入与几何尺寸作为机器人运动学参数来评价机器人性能成为可能。
2 机器人的设计空间
高峰和刘辛军[3-4]提出的空间模型理论,使得在量纲为一且有限的空间内探讨机器人机构性能与尺寸关系成为可能,是机器人机构性能评价与优化设计的一种有效方法。但机器人的机构性能不仅仅取决于机器人的几何尺寸,其也和机器人的位置和姿态密不可分,而机器人末端的位姿恰恰对应着机器人的输入,位置正解式 (2)建立了二者之间的联系。因此,综合考虑机器人的输入与几何尺寸,将它们作为运动学参数,将它们量纲一化,建立机器人的设计空间,将使得更为全面而系统的探讨机器人机构性能与运动学参数之间的关系成为可能。为此,将机器人的实际物理参数无量纲化,令

由式 (11)和 (12),分别以 r1、r2和r3为坐标,可得该机器人的设计空间如图4所示的菱形ABCD。

图4 机器人的设计空间
为了便于设计空间的可读和可用,需将设计空间转化到熟悉的二维平面内,即设计空间的平面图,如图5所示。

图5 机器人设计空间的平面图
在图5中3个无量纲参数r1、r2和r3与二维平面坐标x和y的对应关系为

设计空间内每一点 (如图5中点p)都唯一对应一组无量纲机器人运动学参数,这种对应关系使得在设计空间内探讨机器人机构性能与运动学参数成为可能。只要将机器人机构性能评价指标以数值的形式体现在设计空间内,就可得到机器人的性能图谱,这些图谱将是机器人性能评价与优化设计的基础。
3 全域速度性能图谱
机器人末端的输出速度是机器人的主要性能指标之一,文献[3-6]将其列为机器人机构设计的基本要求之一。为全面衡量机器人在整个工作空间内的速度性能,采用全域速度性能指标来度量机器人的速度性能,全域速度性能指标为:

这里矩阵J为机器人的速度雅可比矩阵,其体现了输入速度到输出速度的映射关系,是机器人的广义传动比。σvmax为速度雅可比矩阵J的最大奇异值,σvmin为速度雅可比矩阵J的最小奇异值,w为机器人的可达工作空间。ηvmax为全域速度极大值指标,ηvmin为全域速度极小值指标,ηvmax和ηvmin的值越大,则机器人的速度性能越好,机器人输入较小的速度,机器人末端将有较大的速度响应。
由式 (14)— (16),在设计空间内计算ηvmax和ηvmin的值,可得机器人的速度性能图谱如图6和7所示,其中图6为速度极大值ηvmax性能图谱,图7为速度极小值ηvmin性能图谱。

图6 速度极大值性能图谱
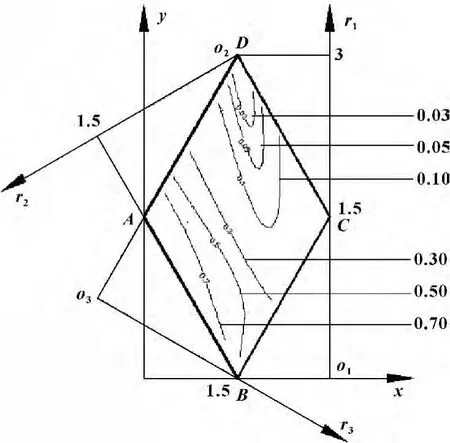
图7 速度极小值性能图谱
由图6和7可知:速度极小值ηvmin和速度极大值ηvmax随r1的增大而减小,即r1越小,速度性能越好;速度极小值ηvmin和速度极大值ηvmax随r2的增大而增大,即r2越大,速度性能越好;在0<r1≤1.5且0.7≤r2<1.5的区域内ηvmax和ηvmin值较大,机器人具有很好的速度性能。
4 结束语
文中对一种平面二自由度并联机器人运动学参数与机器人机构速度性能进行了探讨,得到了平面二自由度并联机器人机构的速度性能图谱。这只是机器人机构性能评价的一个方面,想要对其性能进行综合评价,还要兼顾其灵巧性、刚度、精度、承载能力及加速度性能等性能评价指标与机器人运动学参数关系的研究,这将是今后努力的方向。
[1]LIU Xinjun,JEONG Jayil,KIM Jongwon,et al.A New Planar Two-Degree-of-Freedom Parallel Mechanism[C].Pro2-ceeding of the 11thWord Congressin Mechanism and Machine Science,Tianjin,China,2004[C].Beijing,China MachinePress,2004,3:1214 -1218.
[2]李秦川,陈志,韩阳,等.交叉型二自由度并联机构:CN101804629B[P].2011 -06 -05.
[3]GAO Feng,LIU Xinjun,GRUVERL William A.Performance Evaluation of Two-degree-of-freedom Planar Parallel Robots[J].Mechanism and Machine Theory,1998,33(6):661-668.
[4]刘辛军.并联机器人机构尺寸与性能关系分析及其设计理论研究[D].秦皇岛:燕山大学,1999.
[5]LIU Xinjun,WANG Jinsong,Pritschow G.Performance Atlases and Optimum Design of Planar5R Symmetrical Parallel Mechanisms[J].Mechanism and Machine Theory,2006,41:119 -144.
[6]张立杰.两自由度并联机器人的性能分析及尺寸优化[D].秦皇岛:燕山大学,2006.
Study of the Relationship Between Velocity Performance and Kinematics Parameters of a Planar Two Degree-of-freedom Parallel Manipulator
WANG Bing,NIE Xumeng,HAN Shukui
(School of Mechanical and Electrical Engineering,North China Institute of Aerospace Engineering,Langfang Hebei065000,China)
Based on the existingmechanisms,a new kind of two degree-of-freedom planar parallelmanipulatorwith planar translationalmotion and small inertiawas improved and taken as the objectof study.Unlike the traditional studymethod,notonly the geometric parameters but also the input of themanipulator are consider as the kinematics parameters,and the design space was obtained by utilizing the theory of geometricmodel of the solution space.The global velocity indiceswere calculated in the design space,the velocity atlases of themanipulator were plotted,and the relationship between the velocity and the kinematics parameters of themanipulator was discussed.The results show that:theminimum andmaximum velocity indexes ηvminand ηvmaxare inverse to r1,that is r1is shorter,the velocity performance is better;The ηvminand ηvmaxare proportional to r2,that is r2is longer,the velocity performance is better;While 0<r1≤1.5 and 0.7≤r2<1.5,the velocity performance of the parallelmanipulator is better.The atlases are very useful for performance evaluation and optimum design of themanipulator.
Parallelmanipulator;Design space;Performance atlases;Velocity
TP242
A
1001-3881(2015)21-046-4
10.3969/j.issn.1001 -3881.2015.21.010
2014-07-25
河北省高等学校科学技术研究青年基金资助项目 (Q2012059);河北省科技支撑计划项目 (13211824)
王冰 (1976—),男,博士,副教授,研究方向为机构学与机器人学。E-mail:wbrobot@163.com。
