一种用于FMCW雷达系统的中频信号滤波器
2015-03-07戚昊琛高伟清
戚昊琛, 张 鉴, 张 杰, 高伟清
(合肥工业大学 电子科学与应用物理学院,安徽 合肥 230009)
滤波是信号处理的基础,滤波器可将信号中的干扰成分滤除,对有效信号进行筛选。在调频连续波(frequency modulated continuous wave,FMCW)雷达系统中,雷达传感器所输出的中频信号幅值微小,易受外界干扰源及系统内部噪声的影响,而雷达结构决定其前端很难做到完全的隔离[1]。因此,必须设计滤波器以消除中频信号中的干扰信号,为信号的后续处理做准备。滤波器的设计关系到对目标回波信号计算的准确性,是FMCW雷达系统设计中重要的组成部分。
1 杂波分析及滤波方案
FMCW雷达通过在其变容调谐电压输入端Vtune端口接入调制信号来实现FMCW工作模式,当用于汽车防撞系统时,一般采用三角波调频模式。将正确的调制信号接入传感器的Vtune端口,在未采用任何滤波措施的前提下,使用示波器对雷达传感器输出的中频信号进行检测,如图1所示。示波器B端口接三角波调制信号,如图1中上方波形所示;A端口接传感器输出的中频信号,如图1中下方波形所示。
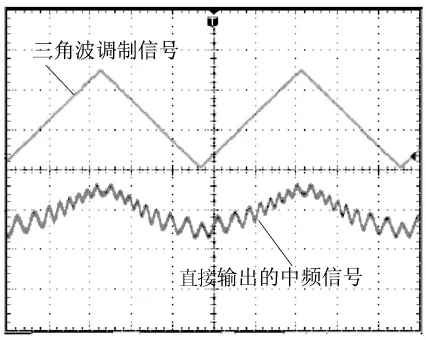
图1 三角波调制的未经滤波的中频信号
由雷达原理可知,雷达接收机将接收到的回波信号和发射信号在混频器中混频后即输出含有目标障碍物距离、速度等信息的中频信号。
对混频后的中频信号进行数学处理[2],得到上扫频段差频(t)、下扫频段差频(t):
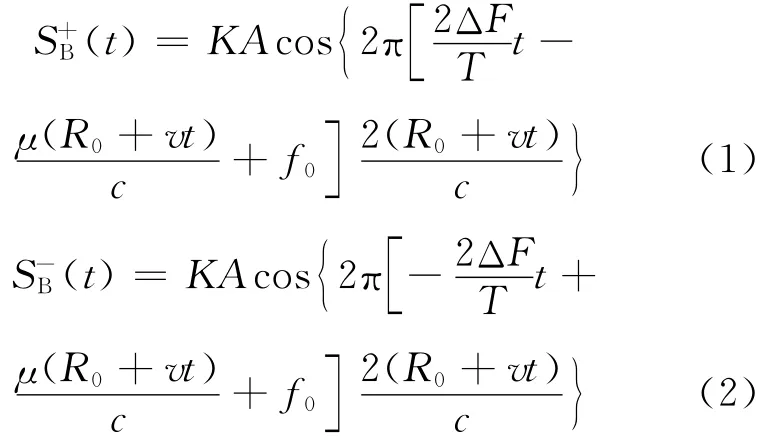
其中,v为雷达传感器与障碍物之间的相对速度;R0为相对距离;f0为发射信号中心频率;ΔF为调制信号带宽;T为调制信号周期;A为振荡器输出幅值;c为光速;K为信号传输损耗因子。
发射信号被目标反射后的接收功率PE可表示为:

其中,PS为发射功率;g为天线增益;λ为发送信号波长;σ为被探测物体的雷达截面。
设雷达系统测距范围R0为0~100m,测速范围v为0~220km/h,传感器额定电压为5V,电流为35mA[1-3],由上述公式可知,回波信号幅值范围为3~300mV,可见输出的中频信号类似正弦波且幅值微小。
而图1所示输出的中频信号则呈幅值较大的锯齿状三角波波形,类似于调制信号,因此必须对中频信号进行滤波等处理。
根据已有研究结果[3],按多元Logistic回归模型中样本容量的计算方法,利用2013年第五次国家卫生服务调查重庆农村地区的相关数据,失访率为50%,计算样本容量为270例。实际共抽糖尿病患者496例。利用Epidata录入问卷调查数据,数据整理和分析采用统计工具软件Stata 11.0。
在中频信号处理过程中,采用高通滤波电路滤除低频泄漏信号,而各种高频杂波可通过添加低通滤波电路来滤除。A/D转换后,再对采集到的离散信号进行数字滤波,则可进一步增加系统准确性。其中模拟电路一般由前置放大器、高通滤波器、可变增益环路和低通滤波器组成。本文针对中频信号的滤波进行分析计算,设计一种适用于FMCW雷达系统的滤波器。
图2所示为FMCW雷达系统中频信号处理流程图[4]。
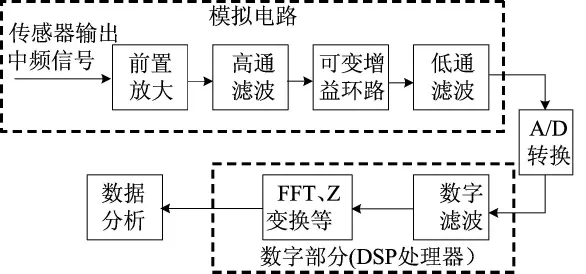
图2 中频信号处理流程图
由FMCW毫米波雷达测距测速原理的分析可知,中频信号的频率fd可表示为:

其中,fVtune为三角波调制频率,根据测距测速要求设调制频率为150Hz(远距离检测)与750Hz(近距离检测)2种[4-5];ΔF设为200MHz;f0设为24GHz。当设测距范围R0为0~100m,测速范围v为0~220km/h时,计算可得中频信号频率不高于100kHz。
高通滤波器主要用于滤除低频调制信号,其截止频率应设为调制频率的10倍[6],则高通滤波器截止频率设为1.5kHz和7.5kHz,无放大增益。同时,负载阻抗值匹配于470Ω~1kΩ之间。
低通滤波器用于滤除高频杂波,设其截止频率为100kHz。当可变增益放大电路的放大系数设为10~30dB可调时[7],信号被放大至1V左右,考虑ADC模块的模拟电压输入要求为2V[8],设低通滤波器的增益为2。
2 模拟滤波单元及实验结果
2.1 高通滤波电路
为降低整个系统的信噪比,在元器件的选择上应尽量使用低噪元器件,本文选用低噪双运算放大器MC33078。根据中频信号处理流程图,首先对消除低频调制信号的高通滤波电路进行设计,本文采用有源滤波,设计电路图如图3所示。
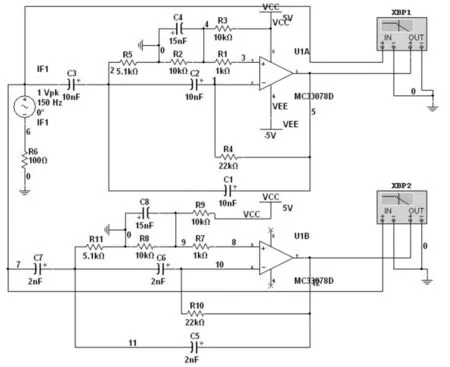
图3 1.5kHz/7.5kHz高通滤波电路图
利用Multisim软件对图3所示电路进行仿真,结果如图4所示。对于截止频率为1.5kHz和7.5kHz 2种情况,设定的仿真范围分别为1Hz~5kHz及1Hz~15kHz。
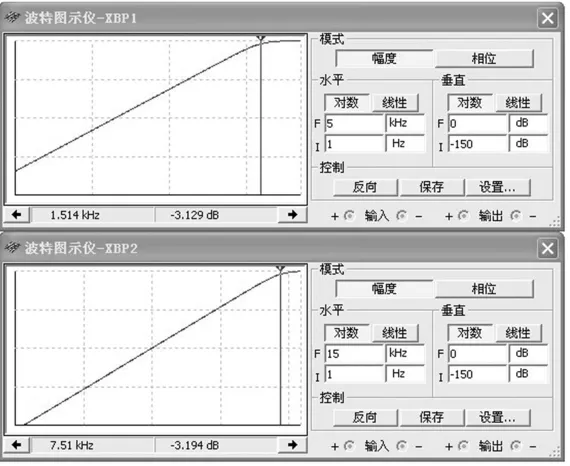
图4 1.5kHz/7.5kHz高通滤波电路仿真图
由仿真得到的幅频特性曲线可知,信号频率在低于设定的1.5kHz和7.5kHz时被吸收,只有高于设定频率的信号才被通过。仿真结果表明,该高通滤波电路是符合设计要求的。
2.2 低通滤波电路
输出信号经滤除低频调制信号及放大后,再设计一个低通滤波电路来滤除高频杂波。根据参数要求,设计的低通滤波电路如图5所示。
设定仿真频率范围为1Hz~300kHz,仿真结果如图6所示。
由仿真得到的幅频特性曲线可见,信号频率在高于100kHz时被吸收,只有低于设定频率的信号才被通过,仿真结果表明该低通滤波电路是符合设计要求的。
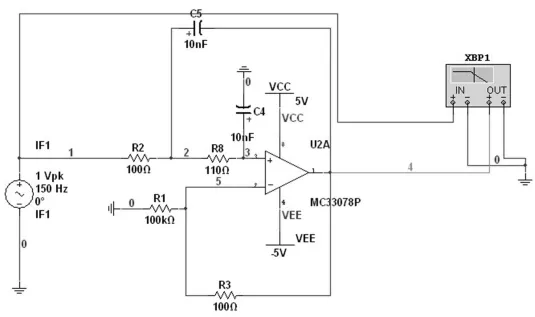
图5 100kHz低通滤波电路图
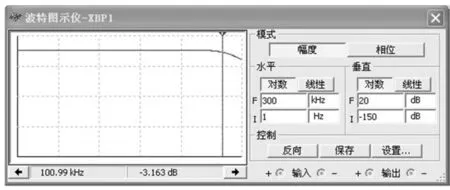
图6 100kHz低通滤波电路仿真图
2.3 实验结果
通过实验对上述电路进行验证。雷达混频器有2个输出通道——同相信号通道与正交信号通道,两者输出信号的幅值频率皆相同,仅有90°的相位差,因此可在示波器上得到理想的对比波形。如图7所示。

图7 示波器显示的经滤波的回波信号
示波器A端口输入的是未经滤波放大电路的信号波形,B端口输入的是经上述滤波单元后的输出端信号。
将图7中2个通道的波形进行对比,显而易见,所设计的滤波电路有效地滤除了各种杂波,符合设计要求。
3 数字滤波单元与仿真结果
因车载雷达系统对测距精度的要求较高,需对采样后得到的离散信号进行数字滤波,滤除离散杂波分量,进一步提高系统的信噪比。考虑到系统对实时性的要求高,本文选用FIR数字滤波器来进行设计[9-10]。
根据(1)式、(2)式对FMCW 雷达输出的中频信号进行仿真,发射信号的中心频率f0设置为24GHz,调制带宽ΔF为200MHz,目标距离R0为20m,速度v为0,周期T为0.001s;并在此中频信号中加入高斯白噪声,模拟直接输出的未经滤波的中频信号,所得到的频域波形如图8所示。

图8 含噪声的中频信号频域波形
由图8可见,含有噪声的中频信号不规则杂波明显。
使用Matlab信号处理工具箱专用的滤波器设计分析工具FDATool对FIR滤波器进行设计,结合DSP的仿真环境CCS进行仿真,参数设置按照上述计算所得的通带范围,阶数取值N=48,通带频率取值0.2<ω<0.3。经过FIR带通滤波器之后,得到其频域波形如图9所示。

图9 经FIR滤波器滤波后的频域波形
由图9可见,使用FIR带通滤波器滤波之后,不规则的杂波得到明显抑制。仿真结果表明,该FIR数字滤波单元能在模拟滤波电路的功能基础上,进一步滤除采样后离散信号中的杂波,符合设计要求。
4 结束语
本文对FMCW雷达系统输出的中频信号中包含的干扰杂波进行了分析,设计并实现了一种针对FMCW雷达传感器,能同时滤除各种低高频杂波的滤波器,利用Multisim仿真和使用示波器连接电路实物2种方式验证了滤波效果。针对采样信号,设计了基于DSP的FIR数字滤波器,滤除离散信号中的杂波分量,进一步提高了系统的信噪比。仿真与实验的结果表明,本文提出的滤波器达到设计要求,可有效滤除FMCW雷达系统中多种连续及离散的干扰杂波,可为该系统后续处理工作提供更为精确的速度距离信号。
[1] 张长会,牛忠荣.基于相位测距原理的汽车防撞雷达[J].合肥 工 业 大 学 学 报:自 然 科 学 版,2007,30(11):1509-1511.
[2] 朱晓华.雷达信号分析与处理[M].北京:国防工业出版社,2011:35-41.
[3] 戚昊琛,胡智文,张 鉴.FMCW雷达系统的双模方向判断模块 研 究 [J].电 子 测 量 与 仪 器 学 报,2014,28(5):486-492.
[4] 戚昊琛,解光军,张 鉴.FMCW 雷达系统及其前端数据采集模块设计[J].电子科技,2012,25(5):44-46.
[5] FSK/FMCW-capable K-band VCO-transceiver with two integrated patch-antennas and IF-pre-amplifier IVS-162 datasheet[EB/OL].[2014-05-10].http://www.innosent.de/en/industry/green-line-radarsensor/ivs-162/.
[6] Dudek M,Kissinger D,Weigel R,et al.Consideration of higher frequency bands in accurate millimeter-wave FMCW-radar system simulations for automotive applications[C]//Wireless and Microwave Technology Conference(WAMICON),Clearwater Beach,FL:2011IEEE 12th Annual.IEEE,2011:1-4.
[7] 徐军荣.FMCW 雷达测距的信号处理技术研究[D].南京:南京航空航天大学,2009.
[8] Jose E,Adams M D.Millimetre wave radar spectra simulation and interpretation for outdoor SLAM[C]//Proceedings of IEEE International Conference on Robotics& Automation,Singapore:2004:1321-1326.
[9] 谢海霞,孙志雄.FIR滤波器的DSP实现[J].电子器件,2013,35(5):554-557.
[10] Haderer A,Wagner C,Feger R,et al.A 77-GHz FMCW front-end with FPGA and DSP support[C]//Radar Symposium,2008International,IEEE,Wroclaw,2008:1-6.
