行走过程中人体下肢受力模型的建立与验证
2015-03-07张军李建喜夏钰坤何旺骁王丽娟
张军,李建喜,夏钰坤,何旺骁,王丽娟
行走过程中人体下肢受力模型的建立与验证
张军1,李建喜2,夏钰坤3,何旺骁4,王丽娟5
近年来,在鞋的设计[1-2]、伤病预防以及下肢康复仪器的设计[3-4]中都需要考虑人体下肢的力学状态。在所有人体下肢力学模型的构建中,足底压力测试是其重要环节。目前,大多数国内外研究都是通过足底测力带和测力台直接进行测量,或是利用有限元模型计算出足底的静态受力情况[5]。然而,运动状态下关节的受力状态有别于静态时的情况。因此,在利用足底受力测试数据的基础上,应充分结合其他研究手段,建立适用于人体运动(如走、跑、跳)的动态下肢受力模型[6],这是目前下肢力学建模研究中的当务之急。
人体下肢由结构复杂的肌肉、韧带、骨骼等组成。因此,研究行走过程中下肢的受力状态,不仅要考虑足底的受力和各部分的质量,还必须综合考虑关节、肌肉的受力[7-8]。由于关节、肌肉的受力无法直接测量,所以目前国内外对下肢运动过程中关节、肌肉的受力研究还存在不足。Hurwitz通过静态力学模型分析了下肢关节的受力状况[9]。通常采用的关节力矩模型只重点考虑躯体的重力和足底压力,计算结果仅能反映出以关节为支点的肌肉力矩[10-11]。Damsgaard通过建立整个人体的有限元模型,计算了踝关节和膝关节的受力状态[12]。杨济匡等人采用有限元方法建立了人体下肢的多关节和韧带模型[13],然而该方法需要利用超级计算机进行运算,计算过程复杂,且无法给出下肢关节受力的解析结果。为准确、简便地分析关节受力情况,需要建立一种综合运动学、动力学、生物力学数据的新模型。
本研究建立了一个新型的人体下肢力学模型,并建立了相应的动力学方程;通过高速摄像机、足底测力台和表面肌电仪等测试仪器获取的运动学、动力学和生物力学数据,对方程进行了求解,并通过对人体行走时下肢肌肉电位的测定,验证了模型的准确性与可靠性。
1 研究方法
1.1 新型力学模型的构建
将人体的下肢受力状态简化为图1所示的力学模型,包括1个重物、3个刚杆和4部分肌肉。人体的上半部分被简化成固结至臀部的重物;大腿、小腿和足部被简化成3个刚杆;踝关节、膝关节和髋关节被简化成铰接点;肌肉作用力被简化成4对作用在刚杆上的未知相对作用力,分别位于大腿和小腿的两侧。因模型将人体简化为二维情况进行分析,所以股二头肌和腓肠肌在图上出现了交叉。
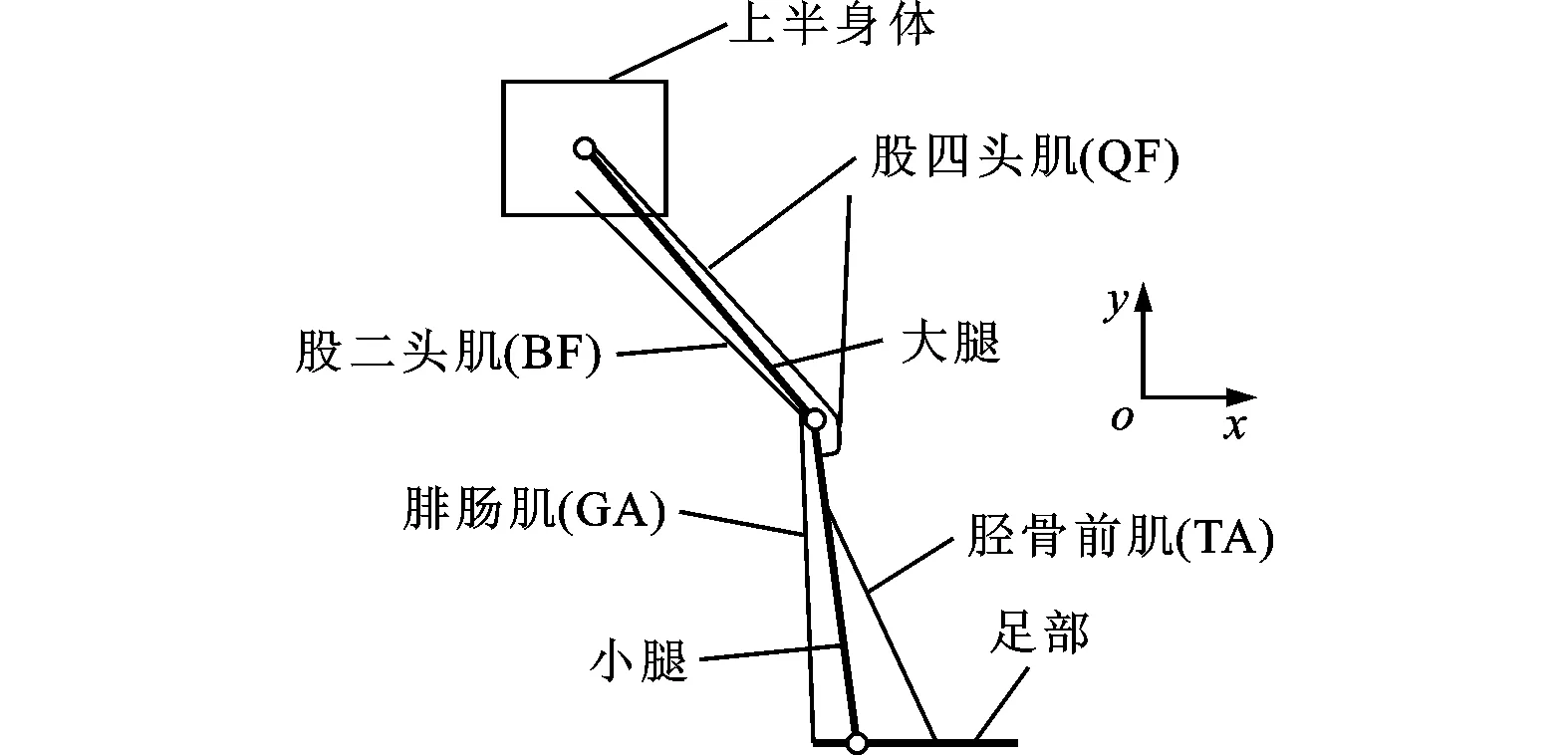
图1 人体下肢的力学模型
地面反作用力被处理成二维平面内的均布载荷,压力中心的移动简化成匀速移动。由于解剖学数据难以处理的原因,将股二头肌简化成与大腿平行,股四头肌的下半部分简化成与小腿平行。
为了建立足部和小腿的控制方程,分别对其进行受力分析。对于足部,需要考虑踝关节(O1)的关节力(Fa)、胫骨前肌和腓肠肌的肌肉力(F1、F2)、足底压力、足底摩擦力和足部自身重力(Gfoot)。对于小腿,需要考虑踝关节的关节力、小腿自身重力(Gcalf)、胫骨前肌肌肉力、股四头肌肌肉力(F3)、股二头肌肌肉力(F4)和膝关节关节力。足部和小腿几何的标注及受力示意图如图2所示。
对足部质心A分别建立x、y方向移动(xA(t)、yA(t))和转动(αy(t))的3个运动方程
(1)
(2)
(3)
同理,对小腿质心B分别建立x、y方向移动(xB(t)、yB(t))和转动(βy(t))的3个运动方程
(4)
(5)
(6)
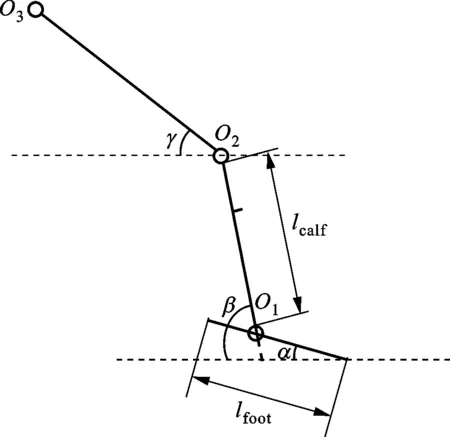
(a)模型标注
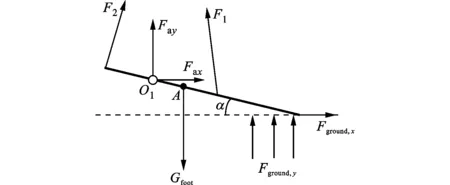
(b)足部受力示意图

(c)小腿受力示意图图2 受力模型示意图
这6个方程能够对足部和小腿的运动受力进行完整的描述,并可用于求解出踝关节和膝关节处的受力情况。由方程及受力示意图可知,模型适用于下肢近似在二维平面内运动、同时上肢近似保持竖直状态的情况。
在上述方程中,小腿和足部的质量与转动惯量等生物力学参数mcalf、mfoot、Jcalf和Jfoot可由人体的质量与身高根据经验公式求得,足底压力可由受力台测得,质心关于时间的运动方程可以由高速摄像数据拟合得到。结合这些方程,可以计算踝关节受力Fa与膝关节受力Fb在各平面的分力。
1.2 踝关节与膝关节受力表达式的推导
利用方程(1)~(6)计算踝关节受力Fa与膝关节受力Fb在各平面的分力,具体过程如下。
首先,将F1x、F1y和F2x、F2y转换成F1和F2与三角函数的乘积形式。由于运动过程中肌肉的角度变化较为固定,因此可利用三角函数的近似值代替角度函数。此外,足底压力中心的移动可近似为匀速运动。为了方便受力台与高速摄像测量数据的使用,这里引入足底触地的总时长ttotal,那么Mground可化为Fground与t/ttotal的乘积形式,之后各数据和方程计算结果的时间起点和结束时刻都将用足底触地和足底离地时刻表示。最后,根据“肌肉只能产生收缩作用,且同一时刻F1和F2最多有一个产生力”的准则和消元法得到与F1、F2无关的Fax、Fay,即可得到踝关节力在y与x方向上的分力Fay与Fax的表达式
(7)
(8)
使用同样的方法化简方程(4)~(6),则膝关节受力Fb在x、y方向上的分力为
(9)
(10)
式中:股四头肌肌肉力F3和股二头肌肌肉力F4的表达式可以由式(4)、式(5)化简消去Fby得到(在这一过程中,F1和F2的处理方式与推导踝关节力Fay和Fay时所用的方法相同,从而可化简消去)
(11)
(12)
至此,膝关节受力与踝关节受力的表达式均已得到。代入各生物力学参数(mcalf、mfoot、Jcalf、Jfoot、lcalf和lfoot),以及受力台的测量数据(Fground,x与Fground,y)和高速摄像机测得的数据(xA(t)、yA(t)、αy(t)、xB(t)、yB(t)和βy(t)),即可得到对应时间膝关节与踝关节的受力。
1.3 生物力学参数的确定
在方程(7)~(12)中,共有6个生物力学参数mcalf、mfoot、Jcalf、Jfoot、lcalf和lfoot需要确定。
对足部而言,由于足部的生物力学数据难以获取,因此在本模型中认为质心是足部的几何中心,并且把足部看成均质刚杆,那么足部质心位置lfoot可由受试者的鞋号确定,足部转动惯量Jfoot与足部质量mfoot则根据Tang给出的肌肉解剖学参数[14]确定。
小腿的参数可通过将受试者的身高、体质量数据代入人体回归方程Y=B0+B1X1+B2X2[14]来计算,其中Y表示小腿参数(质量mcalf(kg)、质心位置(mm)、lcalf或转动惯量Jcalf(kg·mm2)),X1表示体质量(kg),X2表示身高(mm)。回归方程中的参数B0、B1、B2见表1。
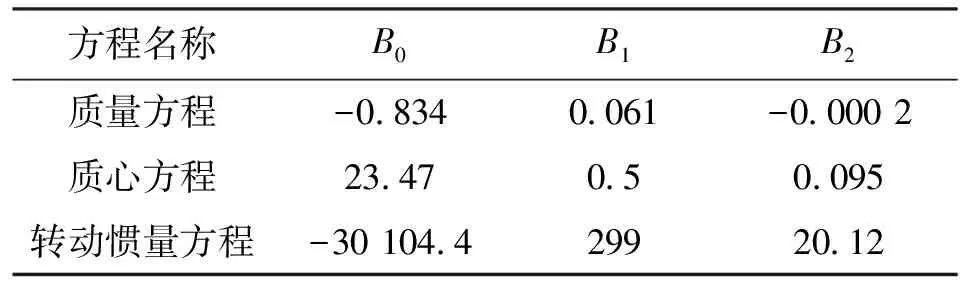
表1 成年人小腿的生物力学回归方程参数
1.4 数据测量
1.4.1 受试者 测量实验的对象为6名来自西安体育学院的运动员,平均年龄为(20.7±0.47)岁,平均身高为(173±4.32)cm,平均体质量为(61.7±4.71)kg,鞋码(欧洲标准)均为41号。
1.4.2 测量仪器 运动学数据通过一台频率为60 Hz的CASIO高速摄像机记录,动力学数据通过KISTLER 9287C测力台以频率500 Hz记录,生物学数据通过芬兰EM6000无线遥测表面肌电测试系统获取。
1.4.3 实验步骤 整个实验包括实验准备、基础性测量、热身运动和测试4个步骤。测试包括站立和步行2种动作,持续时间分别为30和60 min。站立测试时,先打开高速摄像机和肌电仪,然后启动测力台,并将启动的同步信号传输至其他仪器,接着运动员右腿向前迈一步站立在测力台上,完成动作后所有仪器保存数据并回归原状态。步行测试时,除动作外的步骤与站立测试相同,运动员均以右足接触测力台,并反向行走重复一次实验。实验流程如图3所示。
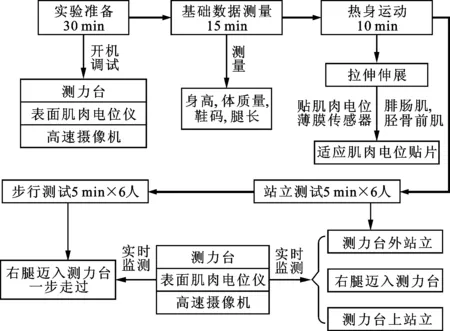
图3 实验流程图
1.4.4 数据处理 对运动学数据进行处理的主要目的是计算下肢各部分的质心和倾斜角度。首先使用APAS处理系统,步骤包括剪辑(去除视频中与实验无关的部分)、数字化(在剪辑过的视频中对下肢关键部位打点)、转换(利用APAS将标记的点自动转换成坐标的形式)、滤波(对上一步输出的坐标值进行平滑化处理)和输出(将上一步形成的结果以Excel表格形式输出)。软件中的处理流程如下

进一步的处理需要利用各点的实时坐标,结合反三角函数得到倾斜角,对质心位置的推算则需要结合人体的生物力学数据并按比例换算成相应受试者的数据。
测力台数据自动同步到配套的Bioware软件中,由软件的output功能直接输出成Excel表格。
2 结果与讨论
本节将以受试者的平均数据为例说明方程(1)~(6)的解法,从而得到膝关节与踝关节在不同方向的受力与时间的关系。时间从足底触地开始,至足底离地结束,一共0.94s。
图4a~4c给出了高速摄像机获得的质心A在x、y方向的移动及转动数据,以及运动轨迹拟合图,由此可以得到质心A的运动学参数xA(t)、yA(t)和αy(t)。图4d、4e分别展示了受力台测得的不同时间足底在x、y方向上受到的压力Fground,x与Fground,y。将以上5个参数的数据代入方程(7)和(8),就可以得到踝关节在x、y方向上的受力Fa,x与Fa,y(见图4f)。
同样,在求解膝关节的受力时,首先通过高速摄像机得到质心B的移动和转动关于时间的变化规律xB(t)、yB(t)和βy(t),如图5a~5c所示,再将其代入方程(9)~(10),即可得到对应时间膝关节在x、y方向的受力(见图5d)。
在得到踝关节与膝关节的受力之后,为了验证模型的准确性,下面对测量的胫骨前肌(TA)和腓肠肌(GA)的肌肉电位(见图6a)与模型计算出的腓肠肌受力进行比较。
腓肠肌受力F2的表达式可以由方程(1)~(6)推导得到
(13)
将各数据代入,可以得到对应时间点腓肠肌的受力,如图6b所示。
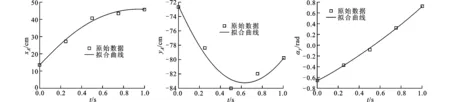
(a)xA(t)原始数据及二次拟合曲线 (b)yA(t)原始数据及二次拟合曲线 (c)αy(t)原始数据及二次拟合曲线
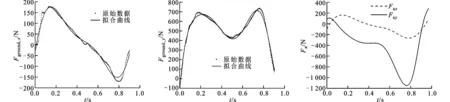
(d)足底压力在x方向的拟合曲线 (e)足底压力在y方向的拟合曲线 (f)踝关节关节力分量与时间的关系图4 求解方程(1)~(3)时使用的数据拟合及计算结果图
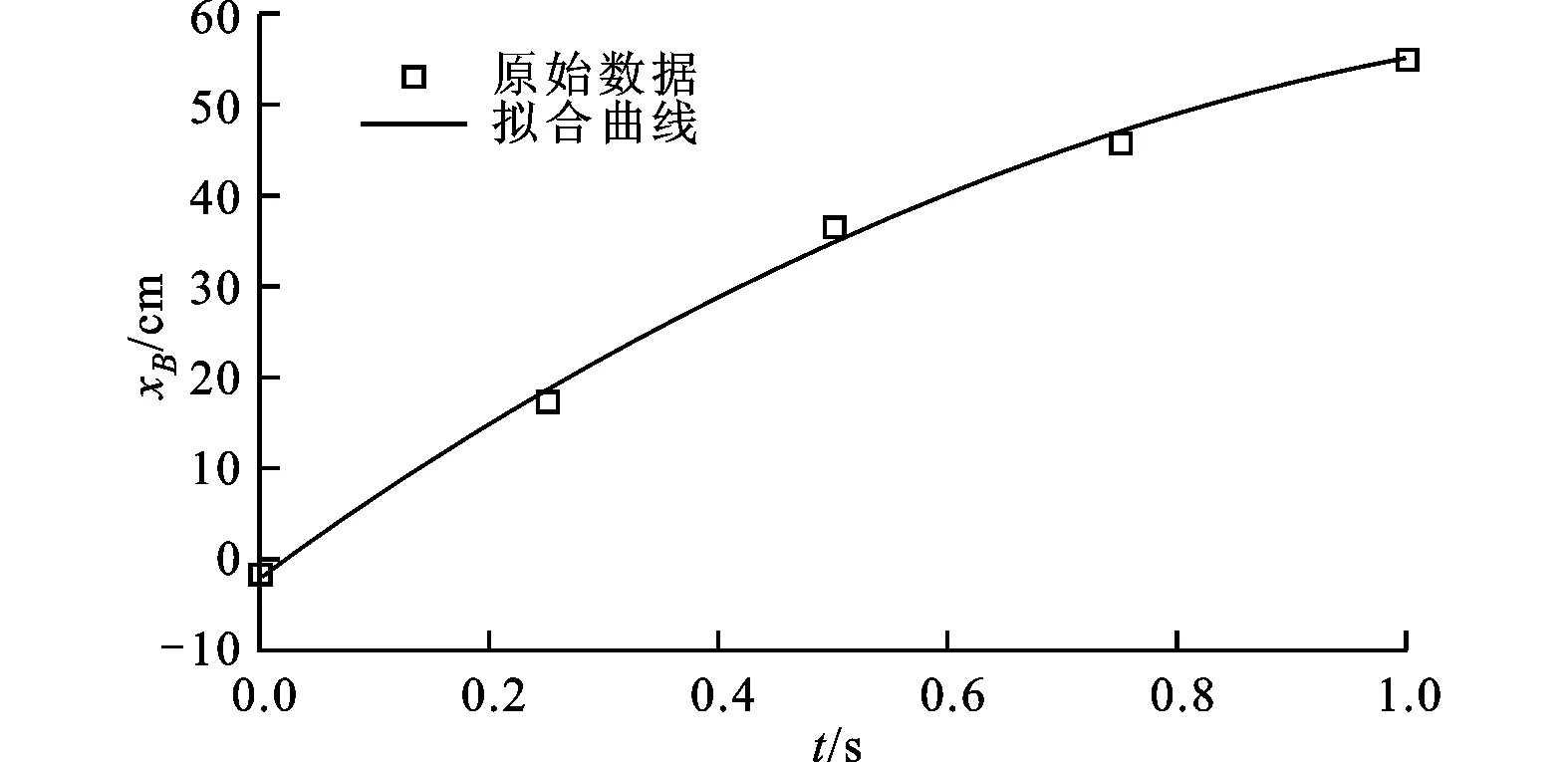
(a)xB(t)原始数据及二次拟合曲线
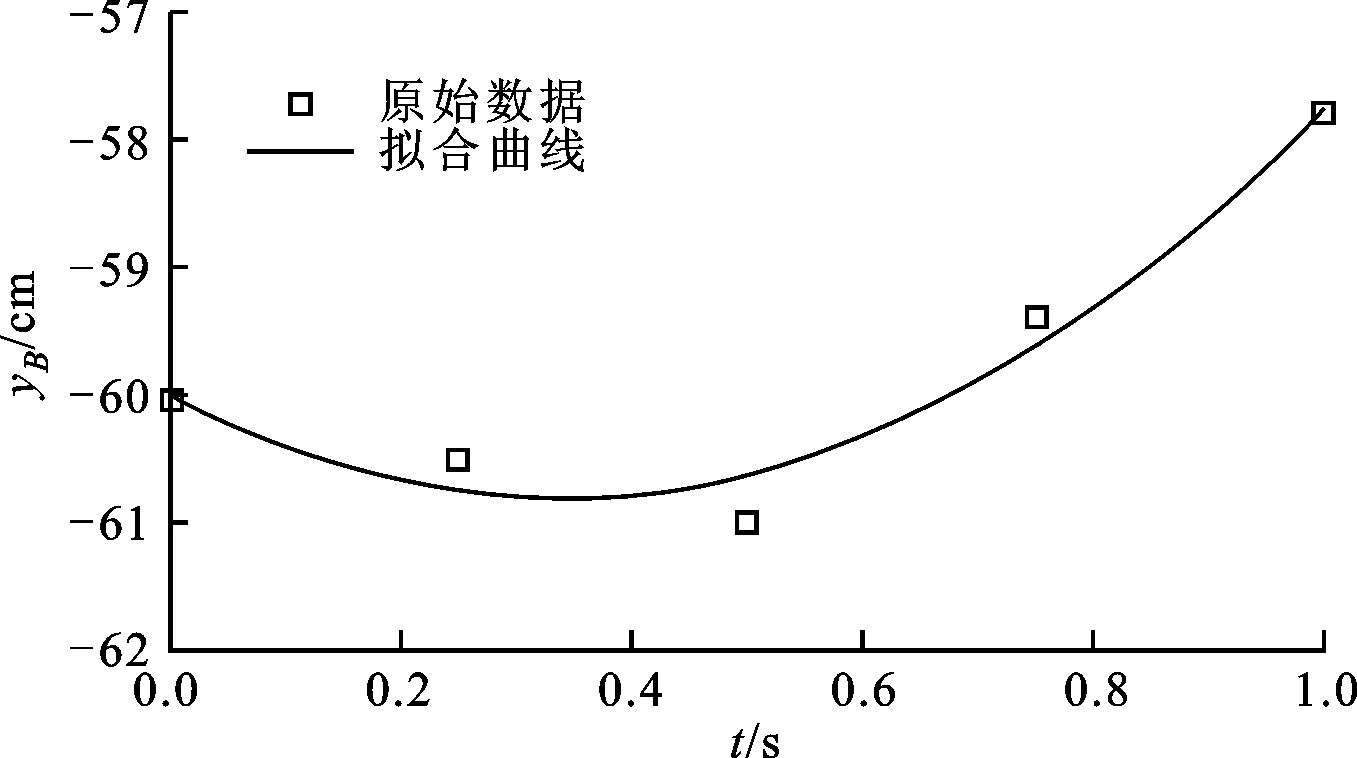
(b)yB(t)原始数据及二次拟合曲线
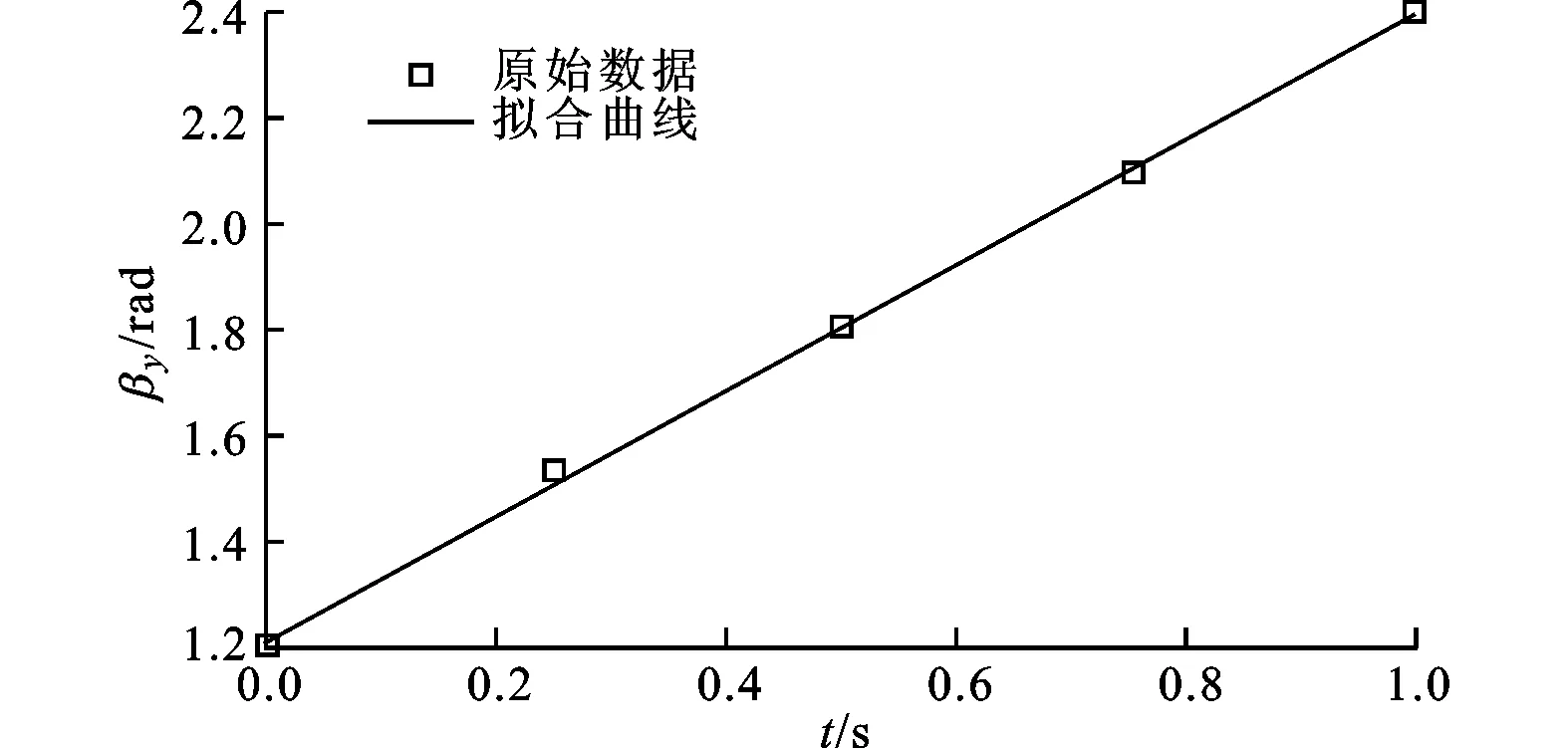
(c)βy原始数据及二次拟合曲线
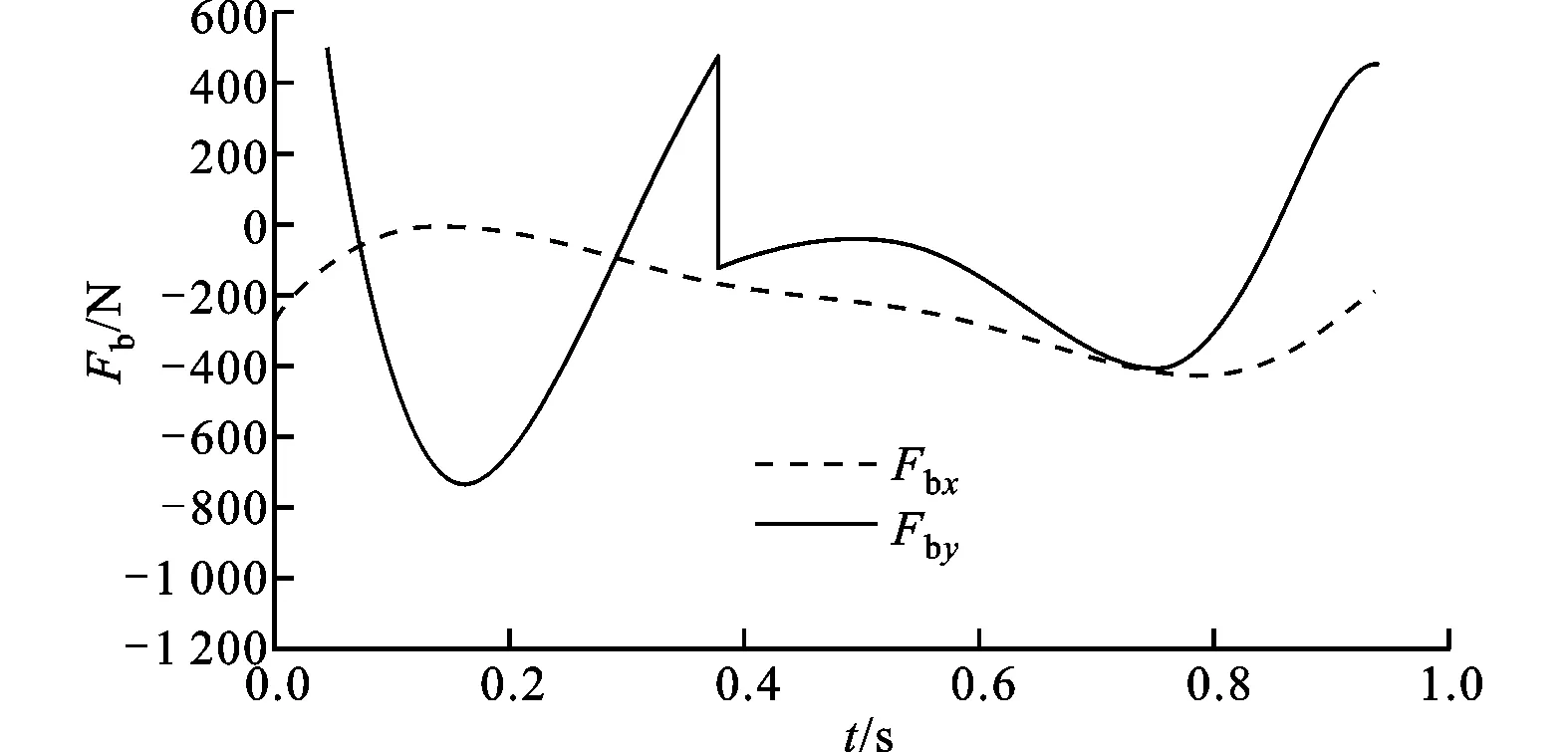
(d)膝关节关节力分量与时间的关系
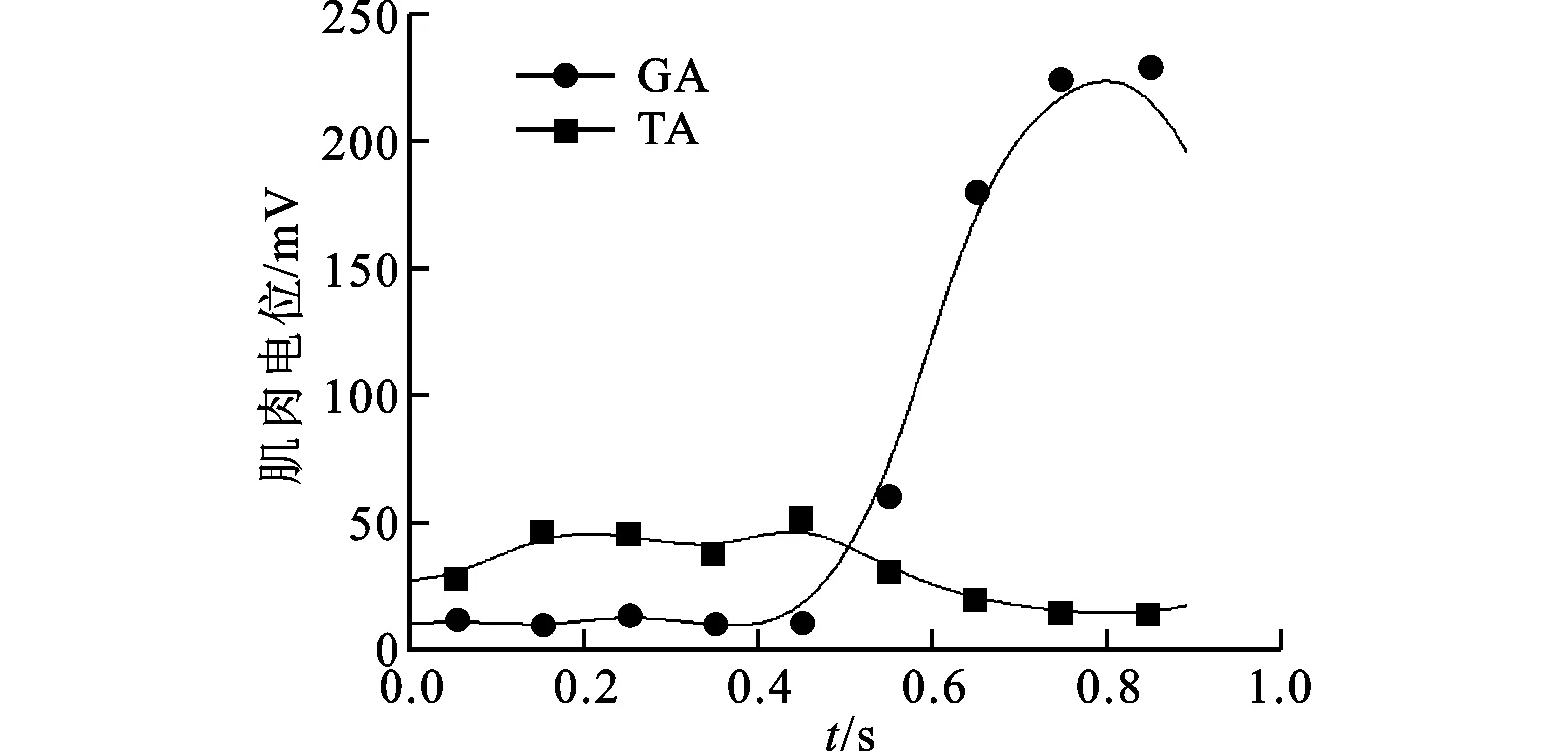
(a)胫骨前肌和腓肠肌肌电图

(b)腓肠肌肌肉力F2与时间的关系图6 从足底触地到足底离地一个步态的肌电及肌肉力图
对于足底受力的情况,由图4d、4e可见:Fground,x曲线存在最大、最小峰值;Fground,x曲线的对称中心大约在(0.5 s,0 N)处;Fground,x曲线和Fground,y曲线的2个峰值都大约在0.15和0.80 s;Fground,y曲线也具有一定的对称性,然而左半部分比右半部分略宽和低。对于关节受力情况,由图4f和图5d可知:Fax、Fay和Fbx的最大值分别是1 147.7、263.4和429.2 N;Fax、Fbx曲线和Fground,x曲线的形状相似,并且极限值也在0.15和0.80 s附近,表明踝关节、膝关节、足底在行走落地的过程中,水平方向上的受力具有高度同步性,可减小足底在水平方向上的受力峰值,亦可减小踝关节、膝关节在水平方向上的受力峰值。
然而,踝关节与膝关节不同的是,图4中Fax曲线在纵坐标0以下的部分略宽于Fground,x曲线,并且图5中的膝关节受力曲线Fbx都位于负值区间。虽然Fay曲线有2个峰值,但形状与Fground,y曲线有明显的不同,其第一个峰值在0.35 s处,第二个峰值在0.75 s处,第二个峰值大约是第一个峰值的3倍,表明人体行走时,在前脚掌着地支撑期间,踝关节在竖直方向上受力最大,因此本文所建立的力学模型可以较为准确地描述踝关节的受力情况。
观察图6可以发现,本模型可以较为精确地描述踝关节的受力情况。但是,踝关节的合力曲线变化较为复杂,难以用单个方程进行完整描述。合力曲线的主要特点是在0.76 s时达到峰值1 174 N。
在求解了模型之后,对模型的验证也是十分必要的。在本实验中,我们利用肌肉电位与肌肉力同时增大这一原理[15]对模型进行验证。从图6可知,由于图6a所示胫骨前肌的活动,腓肠肌肌肉力在足底触地初期与求解过程中的肌肉力不小于0的假设不符。由于图6a中较平缓的TA曲线表示的肌肉力在计算中视为0,波动较大的GA曲线表示的肌肉力视为正,而肌电图上TA仍有一定强度的电位,因此计算出的GA肌肉力实际上是真实GA肌肉力和TA肌肉力等效作用的叠加。所以,在足底触地初期,TA活动强烈而GA活动不足,等效肌肉力为负,而触地后期肌肉活动的情况与前期相反,等效肌肉力主要由GA的活动决定,故等效肌肉力为正。因此,本模型计算结果的可靠性在一定程度上得到了验证。
3 结 论
本文通过考虑足底压力、关节受力和肌肉力,在两个平面维度和一个转动维度的三维系统中,建立了一个能够较好地分析下肢运动的力学模型;利用所建立的动力学方程,并结合高速摄像机和足底测力台获取的运动学和动力学数据,计算了下肢的关节力。计算结果与肌肉电位吻合较好,证明该模型可以更为真实地反映下肢膝关节与踝关节的受力情况。模型具有较高的生物逼真度,可望为下肢运动机理的研究和下肢运动装备的开发提供参考。
本文模型的不足之处主要是在膝关节纵向受力曲线上出现了不连续点。为更好地完善现有模型,需进一步引入更精确的解剖学数据来提供更接近实际的参数,并进一步简化肌肉受力方程,建立适用于跑、跳等复杂情况的人体下肢模型。
[1] JIA Y, CHEUNG J T M, FAN Y B, et al. Development of a finite element model of female foot for high-heeled shoe design [J]. Clinical Biomechanics, 2008, 23(1): S31-S38.
[2] STEWART L, GIBSON J, THOMSON C E. In-shoe pressure distribution in “unstable” (MBT) shoes and flat-bottomed training shoes: a comparative study [J]. Gait and Posture, 2007, 25(4): 648-651.
[3] 洪晓明. 人体下肢运动力学分析与建模 [D]. 杭州: 杭州电子科技大学, 2009.
[4] 王建辉, 徐秀林. 人体下肢动力学建模与仿真研究现状 [J]. 中国康复理论与实践, 2012, 18(8): 731-733. WANG Jianhui, XU Xiulin. Development of human lower limb dynamic modeling and simulation [J]. Chinese Journal of Rehabilitation Theory and Practice, 2012, 18(8): 731-733.
[5] KERRIGAN D C. The effect of running shoes on lower extremity joint torques [J]. Pm & R, 2009, 1(12): 1058-1063.
[6] FOURCHET F, KELLY L, HOROBEANU C, et al. Comparison of plantar pressure distribution in adolescent runners at low vs. high running velocity [J]. Gait and Posture, 2012, 35(4): 685-687.
[7] 孙广艳. 人体髋关节运动生物力学模型研究 [D]. 辽宁大连: 大连理工大学, 2006.
[8] GU Y D, REN X J, LI J S, et al. Computer simulation of stress distribution in the metatarsals at different inversion landing angles using the finite element method [J]. International Orthopaedics, 2010, 34(5): 669-676.
[9] HURWITZ D E, RYALS A R, BLOCK J A, et al. Knee pain and joint loading in subjects with osteoarthritis of the knee [J]. Official Publication of the Orthopaedic Research Society: Journal of Orthopaedic Research, 2005, 18(4): 572-579.
[10]PAIN M, CHALLIS J H. The influence of soft tissue movement on ground reaction forces, joint torques and joint reaction forces in drop landings [J]. Journal of Biomechanics, 2006, 39(1): 119-124.
[11]KAKIHANA W, AKAI M, NAKAZAWA K. Effects of laterally wedged insoles on knee and subtalar joint moments [J]. Arch Phys Med Rehabil, 2005, 86(7): 1465-1471.
[12]DAMSGAARD M, RASMUSSEN J, CHRISTENSEN S T, et al. Analysis of musculoskeletal systems in the AnyBody Modeling System [J]. Simulation Mod-elling Practice & Theory, 2006, 14(8): 1100-1111.
[13]杨济匡, 方海峰. 人体下肢有限元动力学分析模型的建立和验证 [J]. 湖南大学学报: 自然科学版, 2006, 32(5): 31-36. YANG Jikuang, FANG Haifeng. Development and validation of a FE model of lower extremity for dynamics analysis [J]. Journal of Hunan University: Natural Science, 2006, 32(5): 31-36.
[14]TANG G. A technical method using musculoskeletal model to analyse dynamic properties of muscles during human movement [J]. Computer Methods in Biomechanics & Biomedical Engineering, 2011, 14(7): 615-620.
[15]WAGNER H, BOSTRÖM K, RINKE B. Predicting isometric force from muscular activation using a physiologically inspired model [J]. Biomechanics & Modeling in Mechanobiology, 2011, 10(6): 955-961.
(编辑 葛赵青)
(1.西安交通大学体育中心,710049,西安;2.陕西省青少年体育运动学校,710065,西安;3.西安交通大学航天航空学院,710049,西安;4.西安交通大学生命科学与技术学院,710049,西安;5.西安交通大学理学院,710049,西安)
为了准确、简便地对人体行走过程中下肢的受力进行分析,构建了一个新的人体下肢力学模型:将人体的上半部分简化成固结至臀部的重物,将大腿、小腿和足部简化成3个刚杆,将踝关节、膝关节和髋关节简化成铰接点,将肌肉作用力简化成4对作用在刚杆上的未知力。针对该模型建立了相应的动力学方程,能够对足部和小腿的运动受力进行完整的描述。通过高速摄像机和足底测力台获取受试者的运动学和动力学数据,并使用APAS处理系统对数据进行处理,用于对动力学方程的求解,由此获得了下肢的受力状态。利用表面肌电仪测量了人体行走时的下肢肌肉电位,利用肌肉电位与肌肉力同时增大的原理,在一定程度上验证了模型的可靠性。研究结果表明:该模型能够较为真实地反映出下肢膝关节与踝关节的受力情况,具有较高的生物逼真度,可望为人体下肢运动机理的研究和下肢运动装备的开发提供参考。
下肢;关节力;踝关节;膝关节;力学模型
Establishment and Verification of a Mechanical Model for Analyzing the Forces Acted on Lower Limb During Walking
ZHANG Jun1,LI Jianxi2,XIA Yukun3,HE Wangxiao4,WANG Lijuan5
(1. Department of Physical Education, Xi’an Jiaotong University, Xi’an 710049, China; 2. Shaanxi Youth Sports School, Xi’an 710065, China; 3. School of Aerospace, Xi’an Jiaotong University, Xi’an 710049, China; 4. School of Life Sciences and Technology, Xi’an Jiaotong University, Xi’an 710049, China; 5. School of Sciences, Xi’an Jiaotong University, Xi’an 710049, China)
To analyze the stress state of lower limb accurately and simply during walking, a novel mechanical model of human lower limb is proposed. The upper body is treated as a lumped weight; the thigh, calf and foot are considered as three rigid rods; the ankle, knee and hip are simplified as the link joints between the lumped weight and rods; and the muscle forces are simplified as four unknown forces acting on the rods. Based on this model, the corresponding dynamics equations are derived to describe the movement of feet and legs. Using the kinematic and dynamic data collected by high-speed photography and plantar strainmeter, these equations are solved, and the stress state of lower limb is obtained. Moreover, the limb muscle potentials are measured by surface electromyography to verify the reliability of the present model. The results show that this model can reflect the stress state of knee and ankle with high biological fidelity, and provide guidelines to study the mechanism of human lower limb movement and develop lower limb sports equipment.
lower limb; interaction forces in joint; ankle; knee; mechanical model
2015-01-16。 作者简介:张军(1970—),男,副教授;王丽娟(通信作者),女,讲师。 基金项目:陕西省科学技术研究发展计划资助项目(2012KW-33-01)。
时间:2015-06-19
http:∥www.cnki.net/kcms/detail/61.1069.T.20150619.1649.001.html
10.7652/xjtuxb201509022
G804.66
A
0253-987X(2015)09-0134-07
