行人车辆安全距离便携式提示器的设计
2015-02-27李庚渊张瀚文严一民
和 赟,杨 瑞,李庚渊,张瀚文,严一民
(1.电子科技大学 物理电子学院,成都 610054;2.成都市第七中学,成都 610041 )
行人车辆安全距离便携式提示器的设计
和 赟1,杨 瑞1,李庚渊1,张瀚文2,严一民1
(1.电子科技大学 物理电子学院,成都 610054;2.成都市第七中学,成都 610041 )
现今老年人过马路时事故频发,设计一种能够在老年人过马路时提示潜在危险并及时排除危险的仪器已经十分必要了。该文以51单片机和KS103超生波测距模块为核心,以数码管、蜂鸣器、外设键盘、DS18B20外界温度测量模块为辅助电路,设计了一款当行人过马路时,通过单片机的控制和超声波测距的产品。该产品能够自动计算出远方车辆的行驶速度以及车辆保持匀速行驶到行人正前方的时间。如果系统根据实际的天气情况判断发现行人通过马路存在危险,则通过蜂鸣器报警提示行人存在危险,从而及时避免事故的发生。
单片机;安全时间;超声波;报警
老年人步行速度慢、反应慢、视力听力不好。他们过马路时的安全问题一直令人担忧,尤其是在大雾、雨雪等天气不好的时候以及在穿过没有红绿灯的街道时,安全问题就显得更为突出。本设计利用单片机和超声波模块KS103,通过两次测距得到远方车辆行驶的速度以及车辆保持匀速行驶到行人正前方所需要的时间,并将该时间和行人安全通过马路所需要的时间条件相比较,如果存在危险则报警,从而有效地保障行人的安全。KS103超声波模块测距范围可以达到10 m,精度高,每秒最多可以探测500次,可以满足实际的需求,在本设计中超声波模块返回的数据是测距所花费的时间而不是距离。本设计可以根据实际的路况、天气等,自己设定所需的安全工作模式,仪器中的DS18B20模块用来测定外界环境温度从而通过单片机计算出对应的声速,提高了设备的可靠性,具有很好的灵活性应用性。如果某时刻测得的车辆到达行人处的时间不满足行人安全通过马路所需要的时间条件,则启动蜂鸣器报警,及时提醒行人继续过马路则存在危险。从而避免事故的发生,保障行人的安全。
1 车辆到达时间的获得
1.1 外界温度的获得
超声波在空气中的传播速度受到温度的影响,为了提高设备的精确度,必须测量外界环境的温度。DBS1820温度传感器的测温范围为-55 ℃~125 ℃,足够满足日常使用[1]。传感器电路图如图1所示。
在单片机读取安全时间后,开始测距之前,单片机将通过P 3.7口向DS18B20发送与测量温度有关的指令,一段时间后单片机通过P 3.7口接收到关于温度的16位二进制数据,并将其转化为十进制数据[1]。
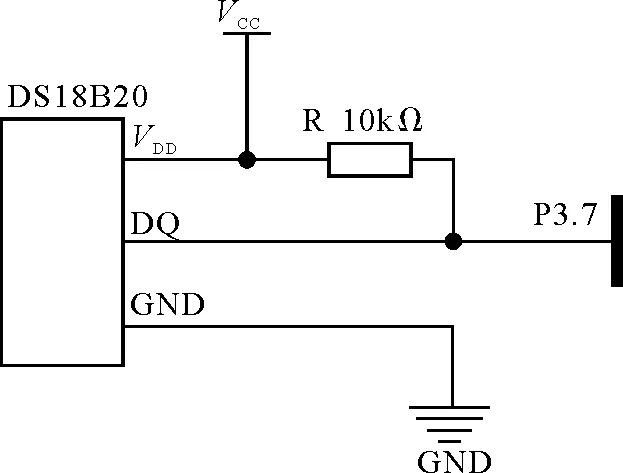
图1 温度传感器电路
1.2 KS103超声测距模块
本设计采用的KS103超声波模块,其工作模式为TTL串口模式,波特率9 600 kHz,1位启动位,8位数据位,1位停止位,无校验位。模块上电后,系统会开始自检测,自检正常后,如果收到主机的有效数据指令,则进入探测模式。本设计采用的探测指令为0xba,最大探测距离为11 m,返回数据为测距时间t,单位为μs。
1.3 通过单片机计算车辆速度
测距开始前,单片机控制仪器通过DS18B20模块获得外界的温度T,并根据空气中声波速度与温度的关系v=v0+0.607T,由单片机计算出对应温度下声波的传播速度v。通过单片机控制一个测距周期为71.493 ms[2],测速原理如图2所示。
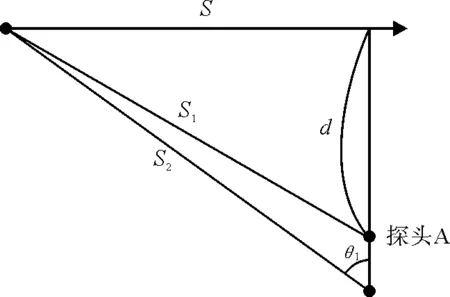
图2 超声波测速原理图
假设车辆是匀速行驶的,本系统由超声波模块A和模块B组成,A、B之间的距离为L。在单片机的控制下开始测距时,模块A和B同时发出不同的声波(避免互相之间接收声波引起干扰)。根据声波的特点,模块A、B发出的声波将先后到达车头并被反射回来。因为声波的速度远大于车的速度,可以近似认为ta=tb,所以在这个时间间隔内可以假定车的位置没有改变。在第一个测距周期内,模块A、B发出的声波在空气中的传播时间分别为ta和tb,由图2可得s1=vsta/2,s2=vstb/2,其中vs为声速。由以上数据和余弦定理可得:
所以可求得sinθ1,此时车辆距离人行走方向的垂直距离s=s2sinθ1,模块A距离车辆行驶方向的垂直距离d=s2cosθ1-L。同理,在下一个相邻的测距周期内可测得车辆距离人行走方向的垂直距离s′,模块A发出的声波在空气传播的时间ta′,模块A距离车辆行驶方向的垂直距离d′,所以Δs=s-s′。对车来说Δt=T+ta′/2-ta/2;T为测距周期,v=Δs/Δt。
1.4 行人安全通过马路的两个时间条件
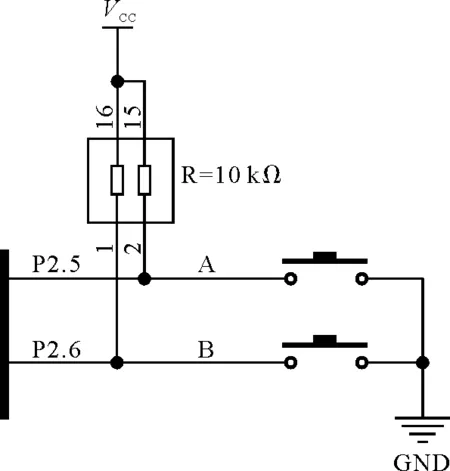
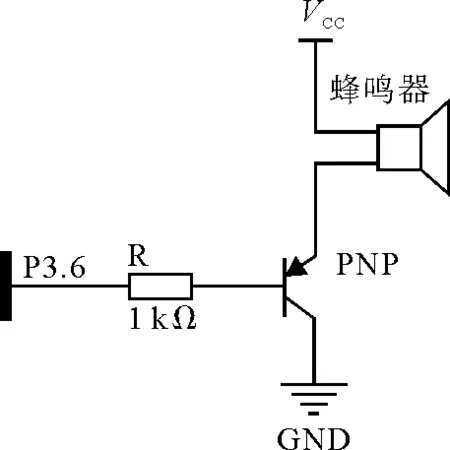
只有当两次测距结束后,才能判断行人是否能安全通过马路。因为测距周期的存在,单片机在得到返回数据后不会马上运行下一个程序,而是等待计数器计满一个周期后再运行下一个与计算到达时间相关的程序[3]。车辆到达行人正前方需要的时间t=s′/v。对行人来说假设车宽度为m(这里主要针对大型客车),行人的步行速度v1,所以行人能安全通过马路的条件为t 2.1 独立式键盘的原理 独立式键盘是最简单的键盘,其直接用I/O口线构成单个按键电路。每个独立按键占用一根I/O线,各I/O线的工作状态不受其他连线的影响[4]。为了使结构简单且使用方便,本设计共采用两个独立按键来调节预设的安全模式,从而提高设备的灵活性。独立键盘与单片机的连接如图3所示。 图3 独立键盘与单片机的连接电路图 2.2 根据实际情况设定安全模式 所谓安全模式就是行人在一定的路况和天气条件下过马路时,仪器保障行人正常通过马路所需的工作模式。本设计通过预设行人的步行速度来保障行人安全。行人可根据实际的天气条件来设定不同的安全模式。一共有4个安全模式,正常、雨天、雪天、大雪,越往后行人的步行速度越低。各个按键相互独立且分别与单个I/O口相连接。在外加高电平的作用下,当开关断开时,对应引脚为高电平,闭合开关后,对应引脚变为低电平[4]。 仪器开始工作后,将首先检查键盘模块的接通状态,且只检查一次。A、B按键依次和单片机的P2.6~P2.7口相连接,在仪器上电后单片机通过扫描2个独立键盘得到一个2位二进制数,A、B按键的状态依次对应该二进制数的高低位。当某个按键接通时,单片机对应引脚为低电平,相应的二进制数位为1,否则为0[3]。不同的安全模式对应不同的二位二进制数,二进制数用来预设行人的步行速度。行人在仪器上电前应根据实际的天气情况设定对应的安全模式。仪器上电后,单片机通过扫描对应I/O口的状态得到一个二进制数。在程序控制下,单片机根据这个二进制数计算出在该天气条件下行人的步行速度v1(由程序完成)。从而为判断行人是否能安全通过马路提供可靠的数据。 3.1 数码管模块 设计采用4位7段共阳数码管作为显示电路。P0为段选控制端,P2.0~P2.3为位选控制端。当相应位选端口输出为高电平时,三极管9012截止,对应数码管熄灭;控制端口为低电平时,三极管导通,对应数码管的公共端为高电平,这个数码管的段选端对应加低电平就可以点亮字段了[4]。无危险时,数码管显示车辆通过行人正前方的时间。存在危险时,在单片机的控制下将熄灭数码管。 3.2 蜂鸣器报警模块 当单片机某时刻通过计算出车辆到达的时间不满足上述两个条件时,单片机在P3.6引脚周期性输出一段变频信号,蜂鸣器随之报警,且数码管关闭,停止显示时间。通过三极管驱动蜂鸣器,单片机引脚P3.6控制蜂鸣器的报警[6],如图4所示。 图4 蜂鸣器报警电路图 采用定时器T1控制串行口的波特率,允许串行口接收数据和串行口中断[5];定时器T0用于数码管动态显示,定时器T2用于测距周期的时间延迟以及蜂鸣器报警时信号频率的控制[2]。仪器上电后先执行相关程序,以扫描独立键盘获得对应的安全模式,并得出行人实际的步行速度。单片机向DS18B20发送测量温度的命令。获得外界环境温度后,通过Vs=V0+0.607t计算出对应温度下的声速;然后不断循环测距,每两个相邻的测距周期内得到车辆到达行人正前方的时间。在每个测距周期开始时,通过软件控制,单片机同时给两个超声波模块发送一个有效的测距命令。两次相邻的测距周期结束后,单片机将计算出车辆到达行人正前方的时间,并判断该时间是否满足以上两个条件。若不满足则熄灭数码管启动蜂鸣器报警;无危险则控制数码管显示车辆到达的时间,蜂鸣器不报警。 本文详细阐述了行人车辆安全距离提示器的工作原理以及工作方式。仪器结构简单,便于携带,设置方便灵活。在单片的控制和计算下,通过两次超声波测距得出车辆到达行人处的时间并及时判断该时间是否满足安全条件,从而能够及时提示行人即将到来的危险,对车辆匀速行驶的假设以及安全模式的可调节性提高了仪器的可靠性、实用性和灵活性,弥补了相关领域的空白。能够很好的保障行人过马路时的安全。 [1]朱清慧,张凤蕊,王志奎. Proteus教程[M]. 北京:清华大学出版社,2008. [2]张友德,涂时亮,赵志英. 单片微型机原理、应用与实验[M]. 上海:复旦大学出版社,2010. [3]周坚. 单片机C语言轻松入门[M]. 北京:北京航空航天大学出版社,2011. [4]郑峰,王巧芝,陈绘兵,等. 51单片机应用系统典型模块开发大全[M]. 北京:中国铁道出版社,2010. [5]肖金秋,冯翼. 增强型51单片机与仿真技术[M]. 北京:清华大学出版社,2011. [6]张义和,王敏男.例说51单片机[M].北京:人民邮电出版社,2010. Design of Portable Indicator Used to Ensure Pedestrians’ Safety HE Yun1, YANG Rui1, LI Gengyuan1, ZHANG Hanwen2, YAN Yimin1 (1. School of Physical Electronics, University of Electronic Science and Technology of China, Chengdu 610054, China;2. Chengdu NO.7 High School, Chengdu 610041, China ) Today, as accident often happens when the elderly cross the road, designing a device which can prompt and exclude the potential risk around them when they are crossing the road is very necessary. This system selects 51 single chip microcomputer and the ultrasonic module of KS103 as the core. The external circuit is designed basing on digital tube, independent keyboard, buzzer and the temperature sensor of DS18B20 which was used to detect the temperature of external environment. When people are crossing the road, this product can calculate the distance and the speed of the vehicle automatically through the MCU and the ultrasonic module of KS103. Then it will calculate the time before the vehicle which keeps that speed comes here and display it by the digital tube. If it can’t meet the conditions that used to ensure pedestrians’ safety, the buzzer will alarm. So the accident can be avoided timely. MCU; safety time; ultrasonic; alarm 2015-04-02;修改日期:2015-04-14 和 赟(1993-),男,本科在读,专业方向:真空电子技术。 严一民(1960-),男,本科,高级工程师,主要从事声学技术与电子信息方面的研究。 B 10.3969/j.issn.1672-4550.2015.06.0812 安全模式的预先设定
3 数码管与报警模块
4 软件部分的设计
5 结束语
