美国梦神号行星着陆器原型系统发展及启示
2015-02-27田林安金坤彭坤梁鲁果琳丽杨雷
田林 安金坤 彭坤 梁鲁 果琳丽 杨雷
(中国空间技术研究院载人航天总体部,北京 100094)
美国梦神号行星着陆器原型系统发展及启示
田林 安金坤 彭坤 梁鲁 果琳丽 杨雷
(中国空间技术研究院载人航天总体部,北京 100094)
详细介绍了美国梦神号行星着陆器原型系统的发展情况,包括任务实施背景、着陆器平台及关键技术发展、试验测试结果以及新型研制模式等,分析了梦神号快速取得自由飞行、避障着陆等成果并具备良好后续发展前景的原因,结合我国实践,提出了小风险换大成果、有效继承已有基础、发展路线多样化以及重视与非传统伙伴合作互动等几点启示,可为我国载人深空探测发展规划及技术预先研究提供参考。
梦神号项目;行星着陆器;原型系统;自主着陆避障;液氧甲烷推进
1 引言
2010年4月,美国奥巴马政府发布了《21世纪新太空探索计划》,目标是构建新的载人深空探测技术体系,开展月球及其以远载人深空探测,以推动美国载人航天事业的持续发展。该技术体系包括:先进星际轨道转移运输器和行星表面着陆器、自主地形障碍探测与规避技术(确保行星表面安全着陆)、原位资源利用技术(支持航天员长期地外驻留并安全返回地球)[1-2]。2010年6月,美国航空航天局(NASA)启动了梦神号(Morpheus)行星着陆器原型系统项目,由NASA约翰逊航天中心(JSC)具体负责组织实施;同时,计划利用梦神号着陆器对先期启动的自主着陆避障(ALHAT)项目成果进行系统试验[3-4]。
梦神号项目主要目的有两个:一是发展一个可快速集成先进系统和技术并开展试验验证的飞行平台;二是研制原型系统为先进的可重复使用行星着陆器(载人及无人)积累技术和经验。20世纪六七十年代美国研制了“阿波罗”登月舱并成功实现载人登月,21世纪初美国在“星座”计划中提出了“牵牛星”载人月面着陆器,但止步于方案设计阶段。梦神号则是美国以载人飞行为最终目的且进入到工程实测阶段的新一代行星着陆器原型系统,该项目一改NASA以往型号冗长繁琐的研制模式,创造了低成本和快节奏的研制典范,目前已经发展了3个平台版本,开展了几十次飞行试验[5]。
本文在系统介绍梦神号着陆器平台、两大关键技术、飞行试验等情况的基础上,进一步分析总结其通用平台开发与核心技术攻关有机结合的能力建设策略,并关注其充分继承和高度弹性带来的低成本和快节奏优势,可为我国深空探测飞行器总体设计、推进、控制等技术发展提供参考。
2 着陆器平台与关键技术
2.1 着陆器平台
梦神号平台干质量约为900 kg,最多可以携带2900 kg推进剂及180 kg有效载荷。主结构采用十字隔板形式,由铝板焊接而成。制导、导航与控制(GNC)分系统及其它电子设备布置在主结构上方的壁板上,下方安装1台主发动机和4个推进剂贮箱,推进剂贮箱为焊接铝合金球体。4条着陆腿末端均配有蜂窝结构以缓冲过载,避障敏感器布置在推进剂贮箱、主结构和着陆腿之间的空隙处。梦神号构型布局如图1所示。
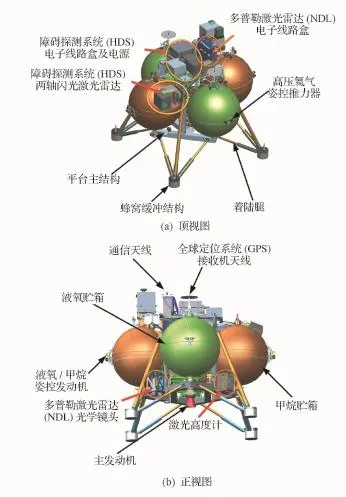
图1 梦神号着陆器平台构型布局Fig.1 Configuration and layout of Morpheus platform
GNC分系统与电子能源分系统项目及型号名称见表1,GNC分系统还需要综合来自ALHAT系统的敏感器信息进行着陆避障控制。
表1 梦神号GNC与电子能源分系统Table 1 GNC and electronics/power subsystems of Morpheus
梦神号平台V1.0版本被命名为阿尔法(Alpha),为2011年4月至8月使用的试验平台;2012年初升级为V1.5版本,配置了性能更好的HD4、HD5主发动机,升级了综合电子与供配电系统,增加了与主推进系统共用推进剂的滚动姿控发动机,集成了ALHAT系统及相应软件。Alpha平台在2012年8月的试验飞行中坠毁,随后重新研制的平台V1.5版本被命名为布鲁诺(Bravo),用于后续飞行试验。目前,新版本平台查理(Charlie)也已开始研制。
项目重点对两项关键技术进行了开发和测试,包括:液氧/甲烷推进技术和自主着陆避障技术。
2.2 液氧/甲烷推进技术
液氧/甲烷推进剂清洁无毒,化学特性稳定,可在轨长时间存储,比冲达321 s;同时,液氧/甲烷推进剂能在行星表面原位生产[1],而且可与飞行器环境控制生命保障及能源系统兼容,在载人深空探测任务中具有广泛的应用前景。早在20世纪80年代,液氧/甲烷推进系统就成为航天领域关注热点,NASA在当时的航天飞机改进以及后期的新一代发射系统研究中,开发出3.87 k N的液氧/甲烷姿控发动机和27 k N的液氧/甲烷再生冷却发动机,2006年至2010年间,NASA又实施了先进低温发展(PCAD)以及低温流体管理(CFM)等项目,进一步研究液氧/甲烷发动机及其推进剂高效供给等技术[6]。
梦神号主推进系统使用1台液膜冷却主发动机,额定推力为24 k N,具备4:1的变推能力。主发动机两侧按正交方式布置了两台电驱动器(EMA)进行推力矢量控制(TVC),以提供平移推力以及俯仰/偏航方向的控制力矩。滚动姿控发动机与主推进系统共用推进剂供应管路,另外配备了高压氦气提供备份姿控推力[7-8]。
为控制成本并保证进度,液氧/甲烷主发动机采用了成熟的碰撞喷注器和液膜冷却燃烧室。第一台主发动机(HD1)设计推力为12 k N,目的是进行短时间的悬停飞行试验。HD1于2010年9月进行了两次试车,由于激发了发动机4.4 k Hz结构模态振动,两次试车给发动机喷注器和燃烧室壁造成了损伤。通过改进喷注器,主发动机升级为HD2版本,但HD2出现了推进剂泄漏问题,未能进入实测阶段。经过对液膜冷却系统的改进,主发动机升级为HD3版本,并于2011年1月进行了试车。HD3额定推力设计为18.78 k N,使用了改进的喷注器、流量可变液膜冷却以及叠层喷注器。HD3于2011年完成了13次共计87 s的开机试验,推力从21%变化到60%,比冲从150 s到205 s。在着陆器平台升级到V1.5版本后,主发动机也升级到HD4、HD5版本。
为了满足高精度避障机动控制要求并与主发动机形成备份,梦神号配置了1套4台89 N滚动姿控发动机,与主推进共用供给管路,最小脉宽为40 ms,能与主推进系统同时工作,有利于抑制由于推进剂贮箱液体晃动带来的扰动。4台发动机采用两个双机机组,对称布置在着陆器质心附近的平面上,有效力臂为1.7 m。
液氧/甲烷推进系统布局如图2所示。
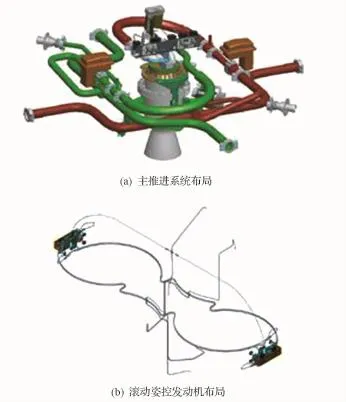
图2 梦神号液氧/甲烷推进系统布局Fig.2 Layout of Morpheus LOX/LCH propulsion system
无论是载人还是无人任务,行星表面着陆过程中必须在线实时地探测识别岩石、坑洞以及斜坡等地形障碍,并及时采取规避措施以确保飞行安全。在复杂的行星表面光照和地形条件下准确探测识别地形障碍,对飞行器敏感器水平、识别算法智能程度和计算处理能力都提出了很高要求。ALHAT项目于2006年启动,虽然“星座”计划于2010年中止,但作为“星座”计划重要组成部分的ALHAT项目一直在持续开展,并在2012年好奇心号火星着陆任务中得到应用。梦神号项目启动以后,ALHAT系统被列为主要载荷,以期在实际的大范围高动态飞行环境中充分验证性能。
ALHAT要求在任意光照条件下,在全行星表面达到相对预定着陆点(ILP)90 m的着陆精度,并在ILP附近90 m×90 m范围内达到相对在线确定安全着陆点3 m的着陆精度,并要求通过多种地面试验和飞行试验将系统成熟度提高至6级。ILP是着陆下降前基于全球勘探和科学目标规划确定的,也是动力下降期间的地形相对导航(TRN)目标,用以确保全局着陆精度;实际着陆过程中还要根据行星表面地形情况,选择安全的着陆点。
ALHAT系统工作分为3个实施阶段,具体过程如图3所示:①从环绕轨道制动下降初期,对行星表面成像并以ILP为目标开展TRN;②距离行星表面高度下降至500 m左右时,成像并生成数字高程图(DEM),基于DEM开展地形障碍探测与规避(HDA),在线选择确定最终安全着陆点;③以确定的安全着陆点为目标,基于DEM开展障碍相对导航(HRN)。相对一般行星表面图像,地形障碍作为导航目标的特征更突出,容易达到较高的导航精度,可以满足精确避障控制的要求。下降着陆过程中,GNC系统敏感器工作并引入ALHAT系统的避障信息,从而分阶段控制着陆器飞行至安全着陆点上方。

图3 行星着陆期间ALHAT系统工作过程Fig.3 Working process of ALHAT during planetary landing
ALHAT敏感器包括远距离激光高度计(LAlt)、多普勒激光雷达(NDL)、障碍探测系统(HDS)3种,如图4所示。LAlt和NDL均由NASA兰利研究中心(LaRC)研制。LAlt作用距离可达30 km、测距精度为0.025 m;NDL通过3束扩散角为30 mrad的激光测量相对行星表面的位置和速度,作用高度为30 m~4 000 m、数据更新高达20 Hz(30 m以下易受污染,此时NDL不再工作)。HDS由LaRC与喷气推进实验室(JPL)联合研制,作用距离为100 m~1000 m,可以满足在1 km处探测0.3 m尺寸地形障碍以及5°斜坡的要求。HDS由安装在两自由度框架上的闪光激光雷达、微型IMU、电子线路以及独立供电电源组成,可以根据ALHAT提供的导航信息对框架进行闭环控制,以保证镜头指向目标区域。ALHAT系统组成及其与梦神号的接口关系如图5所示。

图4 ALHAT敏感器Fig.4 ALHAT sensors

图5 ALHAT系统组成及其与梦神号的接口关系Fig.5 Composite of ALHAT system and its interface with Morpheus
3 地面试验与飞行试验
3.1 着陆器试验
梦神号测试根据技术难度和飞行范围逐步递进安排,分为3种类型:热试车、悬吊测试及自由飞行。
热试车主要目的是测试液氧/甲烷推进系统,采用两种方式:
(1)梦神号由起重机悬吊至距离地面6 m高度以避免发动机羽流影响,同时用尼龙绳索将其固定,用以测试推进系统点火器性能、启动特性、变推能力以及长时间开机工作能力;
(2)梦神号仍挂在起重机上,但停留在地面,并用锁链固定,用以测试起飞时刻的热和声振环境,主发动机仅开机几秒。
虽然在我国城市区域老年人生活照料服务中,东、中、西部老年人生活照料服务存在一定的差异性,但更多的是体现在共性层面,对于生活照料的服务方面都有一个共同的特点:老人的生活照料服务主要源自家庭,对家庭成员的依赖程度大。老人的生活照料需求提供者主要是老人的配偶或者是子女、孙子女,而家人以外的生活照料服务极少。在当前的生活照料中隐藏着一个巨大的现实困境,如果老人的配偶离世,又或者是老人的子女或孙子女由于工作、生活、经济的巨大压力,导致对老人生活照料的服务来源动力不足,老年人的生活照料服务将陷入恶性循环的困境,很难依靠自身的力量获得突破——“空巢老人”问题就是其中的重大难题。
2011年4月,用Alpha V1.0平台进行了3次热试车(使用HD3主发动机),实现了除向GNC系统转交控制权之外的所有测试目标(见图6)。2012年初,用Alpha V1.5平台针对HD4主发动机以及液氧/甲烷姿控发动机开展了3次热试车,累积开机时间达到870 s。2013年4月,用Bravo V1.5平台针对改进的HD5主发动机进行了3次热试车。
悬吊试验的主要目的是在确保安全的情况下,试验推进系统与GNC系统的集成工作性能,以及GNC系统的六自由度控制能力,并模拟着陆工况(见图7)。梦神号由起重机悬吊离地,后续典型飞行轨迹设计为:高度从1.5 m上升至4.5 m,然后横移3 m进行悬停,最后下降直至恢复最初悬吊状态,发动机关机。为了缓冲过载,悬吊绳索中加装了吸能器。悬吊测试一共进行了34次,其中前6次是用Alpha V1.0平台开展,中间20次是用Alpha V1.5平台开展,最后8次是用Bravo V1.5平台开展。

图6 梦神号热试车Fig.6 Hot fire test of Morpheus
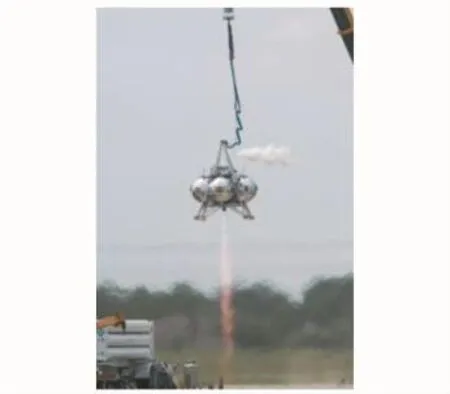
图7 梦神号悬吊测试Fig.7 Tether test of Morpheus
自由飞行试验旨在全面验证梦神号的自主飞行及避障能力,如图8所示。由于需要大范围活动空间以及100 m×100 m的模拟地形障碍区域,自由飞行试验安排在肯尼迪航天中心(KSC)进行,试验区域布置在航天飞机着陆场北端。障碍地形区域中使用砂砾模拟月球坑和斜坡,用堆叠的石块模拟月岩。为了保证安全采取了多种应急中止措施,包括器上程控中止、远程遥控中止、人工远程TTS遥控中止。
截至2014年5月,梦神号一共进行了14次自由飞行试验。其中,第1~9次飞行试验设计为无避障探测与机动飞行试验,均着陆于平坦区域。从第10次起则集成了ALHAT系统,要求着陆于模拟地形障碍区域。自由飞行试验进程并不顺利,2012年8月第一次自由飞行试验在开始后几秒就中止了,因为检测到推进系统故障;两天后开展第二次自由飞行试验时,IMU导航数据丢失了0.6 s,致使梦神号(Alpha V1.5平台)失控并坠毁[9]。新平台(Bravo)于2013年4月开始进入热试车阶段,相对Alpha平台,Bravo进行了70多项改进。2014年4月至5月,梦神号成功进行了5次自由飞行试验。自由飞行试验全面地验证了液氧/甲烷推进系统、ALHAT系统、GNC系统以及三者相互之间匹配的性能,同时也充分地测试了梦神号平台其它子系统(如综合电子、供配电、着陆缓冲等)的可靠性。
3.2 ALHAT系统试验
ALHAT系统在被集成到梦神号之前,一共开展了4种类型的试验,包括:实验室仿真试验、直升机搭载试验、飞行搭载试验以及飞行平台试验,如图9所示。
(1)实验室仿真试验主要用于考验其GNC算法的六自由度控制能力,使用了多种参考着陆飞行轨迹,并开展了考虑敏感器误差的蒙特卡洛打靶仿真,从而确定90 m的全局着陆精度和米级的局部着陆精度指标[10]。
(2)直升机搭载试验于2008年4月开展,闪光激光雷达被安装于直升机前端,在自然和人工地形环境中测试系统的障碍探测识别以及障碍相对导航能力;同时也安装了光学相机,用于测试基于被动光学成像的地形相对导航性能[11-12]。
(3)飞行搭载试验于2009年6月进行,所有的敏感器(光学相机、激光高度计、闪光激光雷达等)都被集成到飞行搭载平台上,在多种光照条件下对地形相对导航性能进行了测试,其导航误差均在50 m以内。
(4)飞行平台试验。2010年1月,美国国防先进计划研究局(DARPA)实验室支持开发了名为“鬼怪”(GENIE)的动态测试环境,并由RR-1飞行平台实现了60 s的悬停飞行,ALHAT搭载RR-1飞行平台的飞行试验获得了成功。2012年8月,ALHAT进入梦神号搭载自由飞行试验阶段。由于第二次自由飞行试验时发生坠毁事故,重新研制的Bravo V1.5平台于2013年7月才开始集成ALHAT进行悬吊试验,并于2014初开始自由飞行试验,试验分开环测试、开环校准、闭环测试3个阶段逐步开展,5次试验均获得成功。自由飞行试验中,HDS基于ALHAT导航提供的姿态信息将镜头指向ILP方向,随后生成的DEM以ILP为中心(耗时约14.1 s),所建立的DEM也是基于ILP局部坐标系的。ALHAT随后对DEM进行评估,从而得到5个以ILP为中心且排序最高的安全着陆点,并标出相应的安全系数,供飞行软件决策参考。

图9 ALHAT系统试验类型Fig.9 ALHAT system test types
4 创新研制模式及启示
梦神号项目自2010年启动以来,已完成了自由飞行试验,液氧/甲烷推进系统和ALHAT两大关键技术在实际飞行中得到了有效验证。虽然没有宏大的任务背景和清晰明确的目标任务,但项目始终以非常高的效率运行并取得了一系列成果。这一切均归功于梦神号项目采用创新研制模式轻装上阵,从而摆脱了NASA以往型号研制中由于追求可靠和全面引起的周期冗长、经费居高等问题。
4.1 以小风险换取大成果
传统的航天器研制尤其是载人航天器,首要目标是确保安全性和可靠性,因此要求采用的技术成熟度高、研制过程中的试验验证充分。梦神号项目团队创立了独特的“风险文化”,即能够接受一定范围内的小风险。采用简单的设计理念,使用部分商业器件,虽然带来了一定的风险,但却在控制成本的同时加快了测试、总结、改进、提高的节奏,缩短了从设计到验证再到改进这个循环的周期,有利于快速提升飞行平台的技术成熟度。项目团队从一开始就充分认识到发展一种全新载人飞行器的难度,转而从小规模、低难度的飞行验证平台起步。梦神号着陆器规模小,平台研制成本容易控制,从而避免了大规模研制和试验所需要大型配套设施带来的巨额经费需求,也使得整个项目具备了较强的抗风险能力。
在梦神号的研制过程中,发生过多次小故障以及一次大事故,但并没有造成灾难性的影响,也没有严重影响进度。HD1主发动机第一次热试车时发生了共振损伤问题,HD2主发动机热试车出现了推进剂泄漏问题,项目团队很快就定位了故障并进行了改进。第二次自由飞行坠毁后,项目团队仅用了8个月的时间就重建了平台,这中间还进行了多达70余项的技术改进工作。重建的Bravo V1.5平台使用了修复后的主发动机喷注器,虽然存在喷注器二次使用可靠性降低的风险,但后来的试验表明喷注器工作性能十分稳定。如果从一开始就追求绝对的安全可靠,梦神号可能需要很长的时间才能进入到试验测试环节,故障暴露会很晚,一方面可能阻碍飞行平台快速迭代改进设计,另一方面也可能损坏昂贵的ALHAT系统。
4.2 保证核心能力发展的同时大量采用成熟基础
梦神号项目瞄准未来载人深空探测任务需求,一方面发展通用平台,另一方面为核心技术发展建立飞行验证平台,而没有追求全面的技术创新。梦神号平台本身并非从零做起,早在2010年1月份,DARPA实验室就支持开发了飞行平台RR-1,在此基础上衍生出后来的Pixel飞行平台、Xombie飞行平台以及JSC的梦神号。除了液氧/甲烷推进系统和ALHAT外,梦神号采用了大量成熟技术。GNC和电子能源系统采用的基本都是已有成熟器件,包括在“国际空间站”上得到充分验证的捷联导航器件;液氧/甲烷主发动机良好地继承了NASA已有的研究成果,采用成熟的碰撞喷注器和液膜冷却燃烧室技术。成熟技术的采用保证了项目团队把精力集中在两大关键技术的研究和集成工作上,避免了大量采用新型试验器件带来的成本风险。
不仅在技术上充分继承,梦神号项目也在试验设施的成本控制上做了大量工作。悬吊试验中并没有新建大型悬吊装置,而是租赁民用吊车。自由飞行试验的试验场地选择在了原航天飞机着陆场北端,充分利用了着陆场的开阔空间,基建工作也仅有地形障碍模拟场地和发动机羽流导流装置。
技术和设施上的继承并没有影响核心能力的发展,反而在成本控制和进度保证上起到了良好的促进作用。
4.3 保证主要目标推进的同时灵活开展多样化研究
梦神号立项之初的主要目标之一就是发展通用测试平台,在实现这个主要目标的过程中,项目也为其它方面的研究提供了条件。例如在Bravo V1.5版本平台试验时,JPL在悬吊点下方铺设了火星模拟土壤,为“火星2020”任务进行了羽流影响研究,也为NASA开辟了一种新型的“搭车试验”模式。
着陆器平台属于大充液比航天器,为了抑制液体晃动的影响,需要在推进剂贮箱中加装防晃隔板。梦神号迅速以低成本研制了缩小的推进剂贮箱,并开展了推进剂液体晃动研究,从而为全尺寸推进剂贮箱液体晃动建模提供了极有参考价值的数据。
4.4 重视与非传统伙伴的合作及互动
在梦神号着陆器研制过程中,JSC与两家私营公司进行了频繁的交流。相对波音、轨道科学等公司,这两家公司并不属于NASA传统合作伙伴,但经合作起到了很好的效果,引入了多项先进的民用技术,同时也为两家公司学习航天部门成熟的质量和进度控制经验提供了机会。项目团队一直致力于开发新的合作伙伴,包括政府部门、高校、其它行业企业等,以寻求更好的设计理念、更新的解决方案。
5 结束语
自2010年6月启动以来,美国梦神号行星着陆器原型系统以灵活的研制模式取得了一系列成果,在所搭载关键技术得到有效验证的同时,平台自身成熟度也在迅速提升,项目也为NASA树立了低成本快节奏的研制典范。本文对梦神号的任务实施背景、关键系统与技术发展、试验测试等情况进行了调研和分析,并挖掘该项目成功的经验,可为我国载人深空探测发展提供有益的借鉴。
(References)
[1]Olansen J B,Munday S,Devolites J,et al.Project Morpheus:lessons learned in lander technology development[C]//AIAA Space 2013 Conference and Exposition.Washington D.C.:AIAA,2013.
[2]Jon B Olansen,Stephen R Munday,Jennifer L.Devolites3 project Morpheus:lander technology development[C]//AIAA Space 2014 Conference and Exposition,Washington D.C.:AIAA,2014
[3]Tye Brady,Erik Bailey,Timothy Crain,et al.ALHAT system validation[C]//8th International ESA Conference on Guidance,Navigation&Control Systems.Paris:ESA,2011
[4]Epp C,Smith T.The autonomous precision landing and hazard detection and avoidance technology(ALHAT)[C]//Proceeding of Space Technology and Applications International Forum(STAIF).Houston:JSC,2007
[5]Jennifer L Devolites,Jeremy J Hart.The tailoring of traditional systems engineering for the Morpheus project[C]//AIAA SPACE Conference and Exposition. Washington D.C.:AIAA,2013
[6]Morehead R L.Project Morpheus main engine development and preliminary flight testing[C]//47th AIAA/ ASME/SAE/ASEE Joint Propulsion Conference and Exhibit.Washington D.C.:AIAA,2011
[7]Hurlbert E,Mc Manamen J P,Studak J W.Advanceddevelopment of a compact 5-15 lbf lox/methane thruster for an integrated reaction control and main engine propulsion system[C]//47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit.Washington D.C.:AIAA,2011
[8]Mc Manamen J P,Hurlbert E.Development and flight operations of a 5 to 20 lbf o2/roll control engine for project Morpheus[C]//50th AIAA/ASME/SAE/ASEE Joint Propulsion Conference.Washington D.C.:AIAA,2014
[9]Steve Munday,Jon Olansen.Morpheus free flight 2 test failure investigation[R].2101 NASA Parkway,Houston,NASA Johnson Space Center,2012
[10]Aaron C Brogley.Lean development with the Morpheus simulation software[C]//AIAA Modeling and Simulation Technologies Conference.Washington D. C.:AIAA,2014
[11]Roback V E,Bulyshev A E,Amzajerdian F,et al. Helicopter flight test of a compact,real-time 3-d flash lidar for imaging hazardous terrain during planetary landing[C]//Proceeding of AIAA Space 2013 Conference&Exposition.Washington D.C.:AIAA,2013
[12]Dr Chirold D Epp,Edward A Robertson,David K Ruthishauser.Helicopter field testing of NASA's autonomous landing and hazard avoidance technology(ALHAT)system fully integrated with the Morpheus vertical test bed avionics[C]//Proceeding of AIAA Space 2013 Conference&Exposition.Washington D. C.:AIAA,2013
(编辑:李多)
Development of American Morpheus Planet Lander Prototype and Its Inspiration
TIAN Lin AN Jinkun PENG Kun LIANG Lu GUO Linli YANG Lei
(Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
The paper introduces in detail the development of American Morpheus planetary lander prototype,including mission background,platform and key technologies development,test results and new developing mode.The reason why Morpheus rapidly attained the achievement of free flight and successful hazard avoidance and gained good prospect of continuous development is analyzed.In combination with our practice,several inspirations are summarized,including a little risk bringing large achievement,inheriting existing foundation effectively,adopting multiple developing routes and paying more attention to non-traditional partners,which can offer some references for the planning and technology research of our human deep space exploration.
Morpheus project;planet lander;prototype system;autonomous landing and hazard avoidance;LOX/LCH propulsion
V442
:ADOI:10.3969/j.issn.1673-8748.2015.05.016
2015-05-29;
:2015-07-02
田林,男,博士,工程师,从事航天器总体设计工作。Email:lucksonner@163.com。