机器视觉在化工过程液位检测中的应用研究
2015-02-26孟磊邹志云郭宇晴赵丹丹刘兴红
孟磊,邹志云,郭宇晴,赵丹丹,刘兴红
(防化研究院,北京 102205)
机器视觉在化工过程液位检测中的应用研究
孟磊,邹志云,郭宇晴,赵丹丹,刘兴红
(防化研究院,北京 102205)
液位测量贯穿于化工生产中,但传统的液位(界面)测量手段大多存在缺陷[1-3]: 如人工机械方法精度低,远程控制困难;电容电阻等电参数式方法带电操作,存在安全隐患,防爆性能差;非接触式测量如超声波式、核辐射式价格昂贵,限制了其应用。鉴于用户对过程液位检测要求的提高,急需一种经济实用、精度高、环境适应性强、易于联网和智能化的检测方法。因此,研究适应于各种实际工业现场环境的高精度液位测量仪器与方法具有重要意义。
随着机器视觉和相关技术的发展,基于图像视频处理的检测方法得到了研究者的广泛关注。如上海交通大学应用视觉技术和图像处理对浇口杯液位检测进行了研究[4-5],Phanindra Jampana等将基于状态空间模型的粒子滤波算法用于图像液位检测[6]。Fernanades等将机器视觉系统与变增益自适应算法结合,针对一类混合沉降装置作了深入研究[7]。桂卫华等利用液位值与泡沫图像之间的概率对应关系,提出了一种基于相关向量机(RVM)的硫浮选液位软测量方法[8]。
本文针对实际化工过程,在硬件上采用集成TCP/IP协议和RJ-45网络接口的智能工业相机来代替以往研究中CCD相机和图像采集卡,减少了检测系统所占用的空间,有助于系统实时性的提升。软件上利用图像预处理、Otsu阈值化和Harris角点检测识别液位,最后结合图像标定获取待测液位数值。
1系统设计
机器视觉系统通常包含三个主要部分: 获取、分析、控制。
1) 获取。即图像采集,利用摄像机(由光学镜头和图像传感器构成)采集图像,经图像采集卡数字化传输至计算机,得到满足分析要求的特定场景的图像。利用麦思肯VisionHawk系列智能相机采集图像,该相机将光学镜头、成像、采集集成在一个模块化的器件上,机身集成TCP/IP协议,带有接口可直接与计算机RJ-45网络端口相连,省去了图像采集卡。为了提高采集图像的质量,采用LED光源前景光方式辅助照明。
2) 分析。即图像处理环节,在计算机上针对采集到的特定场景图像,开发图像处理和识别算法,这是机器视觉系统的关键环节。由于图像采集是将观测到的场景转换成计算机中数字图像的过程,不可避免地会受到某些因素的干扰从而影响成像质量,故需要对图像预处理来削减噪声干扰,增强有效信息。本文采用限定和线性平滑滤波算法ROI(region of interest)进行预处理;随后,采用Otsu阈值算法进行二值化处理,实现图像分割;最后使用Harris角点检测识别二值图像的角点,取其纵坐标平均值即为待测液位的纵坐标,进一步转换为实际液位坐标。图像分析处理步骤如图1所示。

图1 视觉系统图像处理步骤
3) 控制。即I/O控制,控制机器视觉系统本身精准采集图像,根据图像处理与分析结果输出控制信号驱动相应控制机构等。本文主要是将液位识别结果的像素坐标转换为实际坐标后输出显示在计算机界面上,供下一步控制。
2算法实现
2.1图像预处理
采集到的图像中一般包含较多的无用背景信息,这一方面会提高计算复杂度,影响系统处理速度,另一方面可能会严重干扰算法识别质量,造成算法对液位界面处的识别失败。为了避免该问题,需要在预处理中设置一定的ROI,裁剪掉无用的背景。经过反复试验,确定图像识别窗口区域为距离玻璃管壁两侧30个像素处左右。
线性平滑滤波又称为均值滤波[9],它用包围在滤波器模板内像素的算术平均值来更新当前像素。对于常见的3×3滤波器模板,按照中心是否加权可分为两种,如图2所示,其计算公式如下:

19×111111111

图2两种典型平滑滤波器模板
(1)
式中:I——原图像;g——滤波后图像;w——滤波器模板。
对一幅尺寸为M×N的图像,通过对x=0, 1, 2, …, M-1和y=0, 1, 2, …, N-1执行式(1)计算,即可实现对所有像素的更新,效果如图3所示。可以看出中心加权模板在去除噪声的同时保留了更多液位分界面处的细节,下文中采用该模板进行平滑滤波。
2.2系统简易自标定
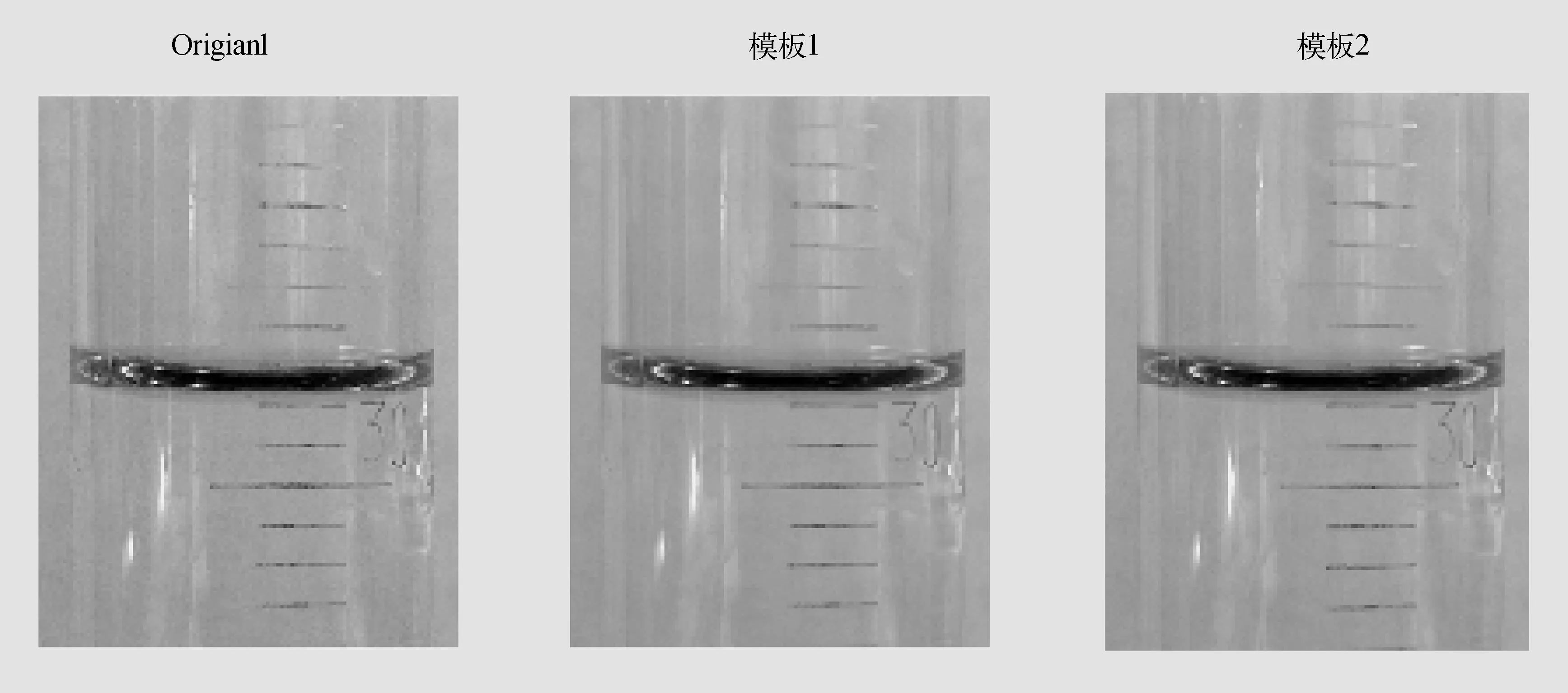
图3 液位图像线性平滑滤波效果
机器视觉采集和后续图像处理的对象一直是数字图像,即一个个像素。要将最后图像处理的结果转换为真实世界中的实际坐标值,需进行摄像机标定。目前已有多种标定方法,如Tsai提出的两步标定的RAC法,张正友提出的基于两幅图像即可操作的张正友算法等。
本文利用一种简单的自标定技术实现图像坐标与真实坐标的对应关系转换。首先采集两幅已知精确液位高度的图片,高度值为h1和h2,利用图像处理识别这两幅图片液位处的纵坐标值n1和n2。则像素值与真实坐标值存在如下对应关系[10]:
K=(h1-h2)/(n1-n2)
(2)
进一步可知实际液位h与像素n之间关系:
h=Kn+b
(3)
式中:b——系统误差,可通过两次标定测算出来。
2.2Otsu阈值化图像分割
阈值处理即选择一个阈值,将图像按照选定阈值二值化从而实现图像分割,阈值的选取对于一副图像的分割至关重要。若T为阈值,则分割后的图像由下式给出:
(4)
Otsu阈值算法又称为最大类间方差法,它是基于统计决策理论提出的一种最佳全局阈值处理算法[9]。该算法首先要计算图像归一化表示的直方图:
(5)
式中:pq——灰度级为q的像素在图像中出现的概率;n——整幅图像所含像素总个数;nq——灰度值为q的像素个数;L——该幅图像的灰度级。

P2(k)[m2(k)-mG]2
(6)
式中:P1(k)——集合G1中所有像素出现的概率;P2(k)——集合G2中所有像素出现的概率。
(7)
(8)
而m1(k),m2(k),mG分别是集合G1,G2和整幅图像的平均灰度:
(9)
(10)

(11)
为了进一步简化计算,定义:
(12)
带入整理得:
(13)
式(13)中,只有m和P1与k有关,其余皆为常数。


图4 液位图像Otsu阈值化结果
将Otsu阈值算法与基本全局阈值算法作比较: 基本全局阈值算法通过迭代误差参数来控制算法的结束,当此误差参数设置较小时,其效果与Otsu相当(如图4),但此时其时间消耗较大,为42ms, Otsu算法只有32ms;当此误差参数设置较大时,其时间消耗与Otsu相当但效果却会迅速变差。故选取了效果好、速度快的Otsu算法对液位图像做阈值处理。
2.3Harris角点检测识别液位
角点可以定义为两个边缘的交点或邻域内具有两个主方向的特征点。Harris角点检测属于基于图像灰度的检测方法,与一般基于图像边缘的检测方法相比具有一定优势[11]。Harris角点检测关注于图像中的特征点,已有研究表明即使在液位、液体颜色发生一定变化时仍然能够检测到液面,同时该方法计算量较小,能够满足工业应用中实时性的要求[12]。
对于图像I(x,y),平移(Δx, Δy)后的自相似性可以通过自相关函数衡量。自相关函数定义:

I(u+Δx, v+Δy)]2
(14)
式中:W(x,y)——以(x,y)为中心的模板窗口;w(u,v)——加权函数,通常为常数或者高斯函数。
由泰勒公式展开:
I(u+Δx, v+Δy)≈I(u, v)+
Ix(u, v)Δx+Iy(u, v)Δy=
(15)
故:
c(x, y;Δx,Δy)=∑w(u, v)[I(u, v)-
I(u+Δx, v+Δy)]2≈

(16)
式中:

(17)
因此,图像平移后的自相关函数就近似成了二次项函数:

(18)
进一步可得椭圆方程:
(19)
椭圆的尺寸由M矩阵的特征值确定,特征值表征灰度变化最快和最慢的两个方向(椭圆方向则由特征向量表征决定)。Harris角点法并不需要计算出M的特征值,只需要计算出一个角点响应:
R=detM-α(traceM)2
(20)
式中: α——经验参数,一般为0.04~0.06。
Harris角点检测算法可总结为以下步骤:
1) 计算图像I(x,y)在x和y两个方向的梯度Ix, Iy:
(21)
2) 计算图像两个方向梯度的乘积:
(22)
3) 使用高斯函数对步骤2中各梯度乘积进行加权运算,生成矩阵M的组成元素A, B和C:


C=g(Ixy)=Ixy⊗w
(23)
4) 计算每个像元的Harris响应值R,并对小于某一阈值的R置0:
R={R: detM-α(traceM)2 (24) 5) 在3×3的邻域内进行非极大值抑制,局部极大值点即为图像中的角点。 6) 取得所有Harris角点,对其所有纵坐标计算均值即可得到液位高度。 本文液位图像的Harris角点检测结果如图5所示,检测出的角点用星号标出,显然对其纵坐标取均值可以很好地反映出液位的实际位置。 图5 Harris角点检测结果 3结论 实验中首先对液位测量系统进行自标定,选取2个已知液位高度和像素值的点为(32.5mm, 146pixel), (31.5mm, 165pixel),故像素值与真实坐标值转换关系为 h=-0.0526n+40.1842 (25) 对于液位精确值为32.5mm的图像,图像处理识别出来的角点纵坐标平均值为142.9pixel,转换成真实坐标为32.7mm。故该系统液位检测误差可精确到0.2mm,在图像采集速度上,采用的相机最高可达20帧/s,在算法设计上Ostu阈值化和Harris角点检测时间开销较小,为数十毫秒级别,可以满足一般化工过程液位测量的需要。 本文将集成TCP/IP协议的智能工业相机与计算机连接采集液位图像,利用线性均值滤波去除噪声,Otsu阈值处理与Harris角点检测结合识别液位界面,最后结合简易自标定方法计算出实际液位。实验表明系统精度较高、实时性好,可以满足一般化工过程可视化液位界面检测的需求,具有一定的理论与实际意义。 参考文献: [1]李丽宏,谢克明.液位自动检测的现状与发展[J].太原理工大学学报,2001,32(04): 417-420. [2]任开春,涂亚庆.20余种液位测量方法分析[J].工业仪表与自动化装置,2003(05): 12-16. [3]齐永生,宋生奎,涂亚庆.储油罐液位测量技术现状与发展趋势[J].石油工程建设,2006,32(04): 1-4. [4]田涛,吴君.图像处理在铸造工业中的应用[J].测控技术,1999,18(08): 42-45. [5]潘且鲁,张颖川,潘俊民.基于图像处理技术的液位测控系统[J].自动化仪表,2000,21(04): 36-38. [6]JAMPANA P, SHAH S L, KADALI R. Computer Vision Based Interface Level Control in Separation Cells [J]. Control Engineering Practice, 2010(18): 349-357. [7]FERNANDES L S L, FILHO F C M, PAULO J B A, et al. Gain Scheduling Adptive Control Applied to a Particular Mixer-settler Equipment [J]. Control Engineering Practice, 2013(21): 1121-1127. [8]桂卫华,陈志鹏,何明芳,等.基于相关向量机的硫泡沫浮选液位软测量[J].控制工程,2014,21(01): 1-4. [9]冈萨雷斯,伍兹,阮秋琦,等.数字图像处理[M].3版.北京: 电子工业出版社,2013: 93-95,479-483. [10]刘晓伟,赵翠莲,汪地.基于面阵CCD的标准金属量器液位监测系统[J].计算机测量与控制,2006,14(07): 1138-1140. [11]赵小川.Matlab图像处理能力提高与案例应用[M].北京: 北京航空航天大学出版社,2014: 44-52. [12]叶昕鑫.基于图像的微化工过程液位与流量测量[D].杭州: 浙江大学,2013: 12-13. [13]孙长库,魏嵬,张效栋,等.CCD摄像机参数标定实验设计[J].光电子信息与技术,2005,18(02): 43-46. [14]李新彦.全固态数字图像监视装置研究[J].石油化工自动化,2010,46(04): 48-50. 摘要:液位检测在化工生产中有着广泛的需求,传统液位测量方式存在安装空间要求高、智能化程度低、组网难等问题。基于机器视觉技术设计了一套液位/界面测量系统: 硬件上采用集成TCP/IP协议和接口的高速智能工业相机代替以往研究中CCD相机和图像采集卡,减少了系统空间占用,软件上利用图像预处理、Otsu阈值化和Harris角点检测识别液位,最后结合图像标定获取待测液位。实验表明: 基于机器视觉的液位检测方法具有良好的精度,能够满足化工过程对液位检测的要求。 关键词:机器视觉液位检测Otsu阈值化Harris角点 Application Research of Machine Vision in Liquid Level Detection in Chemical ProcessMeng Lei, Zou Zhiyun, Guo Yuqing, Zhao Dandan, Liu Xinghong (Research Institute of Chemical Defense, Beijing, 102205, China) Abstracts: Liquid level detection is commonly needed in chemical production. Traditional liquid measurement mode owns disadvantages of high requirement for installation space, low intelligence degree and difficulty of building up network. Based on technology of machine vision, a set of liquid level/interface detection system is designed. Intelligent industrial camera integrated with TCP/IP protocol is adopted instead of CCD camera and image capturing card to capture images with reduction of space in hardware. Image pre-processing, Otsu’s threshold algorithm and Harris corner detection are utilized to identify liquid level in software. The liquid level will be achieved combined with camera calibration. Experiment results show the precision of the proposed method is high. It can satisfy need of level detection in chemical process. Key words:machine vision; liquid level detection; Otsu’s threshold; Harris corner 中图分类号:TP391.41 文献标志码:A 文章编号:1007-7324(2015)04-0039-05 作者简介:孟磊(1990—),男,河南开封人,2013年毕业于西安交通大学自动化专业,获学士学位,现为防化研究院硕士研究生,主要从事过程控制、机器视觉检测方面研究。 稿件收到日期: 2015-03-24。
