摩擦非线性伺服系统辨识建模方法研究
2015-02-24韩大伟盛午刚
韩大伟,赵 梅,李 伟,盛午刚
西昌卫星发射中心,四川 西昌 615000
1 引言
建模是现代伺服控制设计的基础,利用模型验证所用控制算法的有效性可以起到事半功倍的效果[1],此外在应用一些先进控制方法时,必须首先获得系统的精确数学模型,才能进行设计,因此能够对系统进行精确建模非常重要[2-3]。一般建模时经常会对系统进行线性化处理,这样不但原理简单,而且工程应用性强,但是实际上一般系统都会或多或少的具有非线性因素,例如摩擦、饱和、死区等,如果在系统建模的过程中对这些非线性因素没有处理好,只是一味的简单化线性处理,那么得到的模型会和实际系统的特性相差很大[4],使用这样的模型进行控制设计,其设计结果往往和实际控制效果也会差别很大。因此本文提出的一种基于摩擦补偿的非线性伺服系统的辨识建模方法,可以实现系统的精确建模。
2 建模方法设计
本文所研究的建模对象结构如图1所示,这是一个直流电机伺服驱动系统,硬件主要包括直流驱动电机、齿轮传动组合和天线负载。它通过在直流电机输入端输入工作电压U带动负载运转,输出角速度ω,Gω(S)=ω(S)/U(S)即为本文所要建立的伺服系统速度环传递函数数学模型,如图2所示。
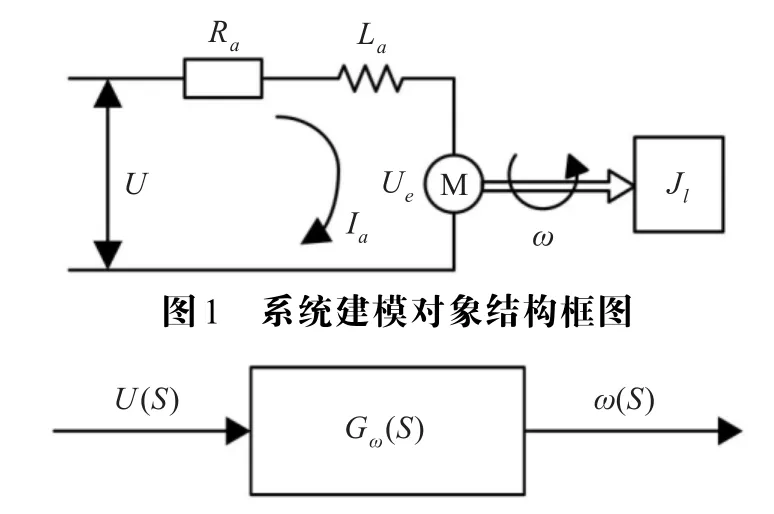
图2 伺服系统速度环传递函数结构框图
在对该伺服系统进行建模实验时发现,本系统受到很大的摩擦因素的影响,如果建模时对摩擦这种非线性因素不做好处理,那么经过辨识得到的模型,准确性可能会很差。本文采用将系统摩擦补偿后,再线性化处理的方法,可以实现系统的准确建模。
2.1 摩擦模型的建立
本文通过分析系统的摩擦特性,决定采用LuGre模型结构[5-6]作为对系统进行补偿的摩擦模型,其数学公式如下:

其中Fss为摩擦力矩,ω为电机转速。α0,α1,α2,ωs为待辨识的摩擦模型系数。具体实现是通过辨识实验在电机输入端输入某种电压斜坡信号作为摩擦辨识输入信号,以对应的电机转速和电机电流(电流和力矩成正比关系)利用遗传算法[7-9]求得模型的各个系数,从而得到所研系统的摩擦模型。
2.2 系统模型的建立
由于所要建立的系统模型最终是一个经过摩擦补偿的线性化传递函数模型,因此重点是摩擦补偿设计和线性模型的建立。
2.2.1 摩擦补偿设计
为了保证辨识得到的线性模型能够包含摩擦非线性的影响,在对线性系统进行辨识激励输入时按照之前得到的系统摩擦模型,可以在多正弦激励输入信号[10]中叠加一个摩擦补偿值,以抵消摩擦的影响,这样经过补偿后的系统可近似看做一个线性系统。补偿方法如图3所示。
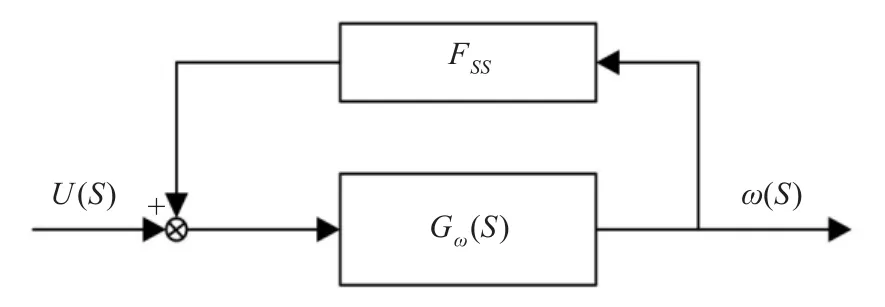
图3 摩擦补偿辨识实验设计原理框图
2.2.2 线性模型的建立
线性模型的建立主要包括模型阶次的确立和模型参数的辨识。
2.2.2.1 线性模型阶次的确立
模型阶次一般通过经验得到,或者比较不同阶次模型的拟合效果来确定模型阶次。初始设定的模型阶次不同,所得的拟合结果也不相同。根据系统辨识理论:阶次较高的模型可以更好地拟合数据,但是不当地选取过高的模型阶次,可能会导致测量噪声的影响被放大,严重影响模型的准确性[4],因而模型的阶次不宜过大。通过文献调研结合测试实验对系统的研究,确定本系统速度环模型使用二阶传递函数模型。

2.2.2.2 线性模型参数辨识
为了保证辨识参数值的正确性,需设计一种能有效激发系统在各频段的频率响应特性的辨识输入信号,结合系统辨识理论,本文采用质数倍频随机相位多正弦叠加信号作为输入信号对系统进行激励,并采集速度输出数据,辨识实验如图3所示,利用高斯—牛顿法[11-12]从输入输出数据中得到系统传递函数模型参数,具体方法如下。
获取了系统时域输入输出数据以后,通过快速Fourier变换(FFT)将输入输出数据从时域转换到频域,在指定频率点ωi,i=1,2,…,d将频域上的输入输出数据相除,可以得到频率响应数据(jωi)。获取了频率响应数据(jωi)之后,非线性最小二乘辨识问题即为求取如式(3)所示的传递函数模型中未知的系数pk,k=1,2,…,n和qk,k=1,2,…,m,使得式(4)给出的代价函数ε最小,从而得出系统线性部分的传递函数。
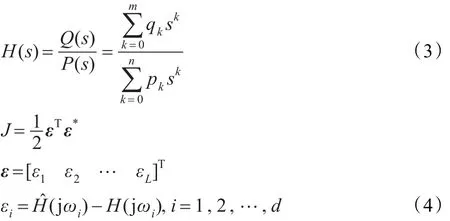
式(4)是标准的非线性最小二乘问题[13-15],本文采用高斯-牛顿(Gauss-Newton)法通过计算机编程求解。多正弦叠加信号的形式如式(5)。

式(5)中需要设置的参数包括叠加信号的频率fk=pdfb,fb为信号基频,其中pd为质数;初相角φk,k=1,2,…,d,初相角可以取随机值,在辨识实验之前应生成多组初相角,取信号幅值最小的一组作为辨识信号。
3 模型辨识与验证
3.1 模型辨识
(1)摩擦模型辨识
由于采用开环建模,所以首先将图4所示建模对象的电流环、速度环和位置环全部断开。设计辨识实验,在DSP中产生各种输入信号,经过功放驱动电机运转,采集输入信号和对应的输出电枢电流、电机转速和负载方位位置量。
为了测试系统在恒定输入下的稳态输出和减少对系统的冲击,系统摩擦模型辨识输入信号采用了斜坡上升随后保持稳态的信号进行实验,例如,斜坡上升10 s,达到峰值5 100,并保持峰值5 s的斜坡信号,如图5。
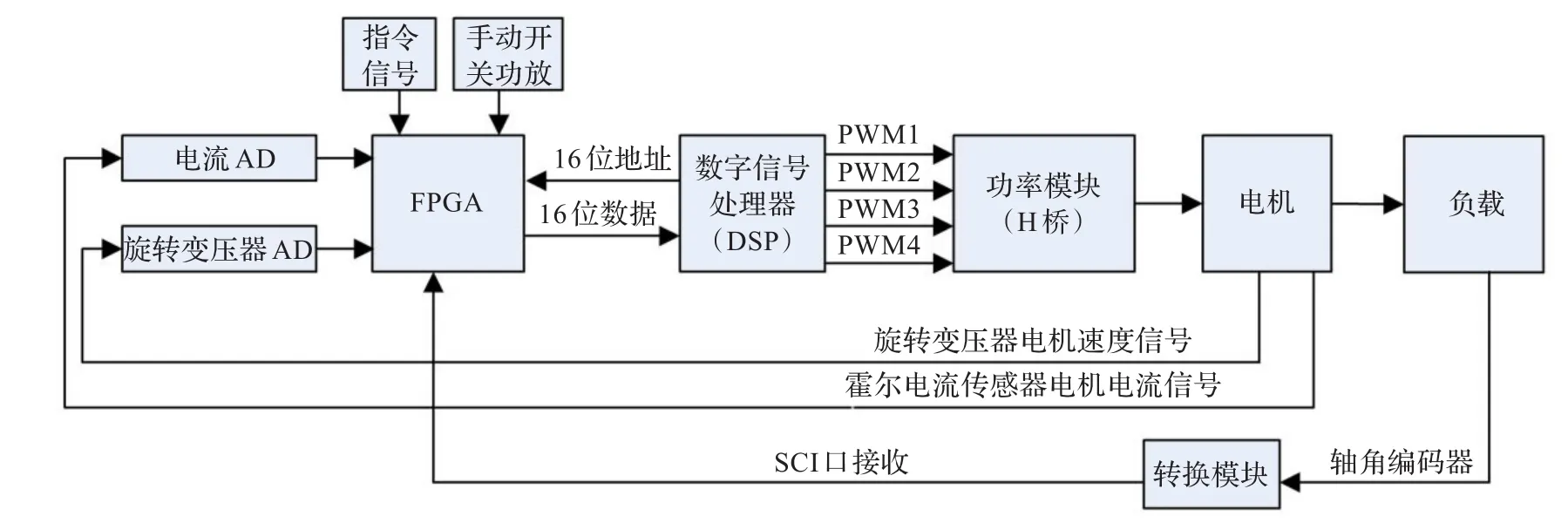
图4 实验设备组成框图
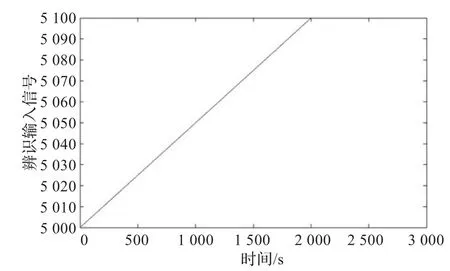
图5 斜坡稳态上升输入信号
然后使用对应的测速机输出的转速信号作为辨识实验输入数据,以等价于电机转矩的电枢电流作为辨识实验输出数据,经过遗传算法寻优最终获得的相应参数为:库伦摩擦系数α0=0.157 8;静摩擦系数α1=0.211 4;粘性阻尼系数α2=0.008 371;Stribeck速度ωs=0.115 3;从而非线性摩擦模型为;

(2)系统模型辨识
采用频域辨识方法在雷达伺服系统上进行辨识实验。DSP软件中信号采样频率为100 Hz,辨识输入信号u(t)设计为PWM码值形式,数据长度为2 048,基频为0.048 8 Hz,质数pd=2,3,5…,83,辨识输入信号u(t)如图6。
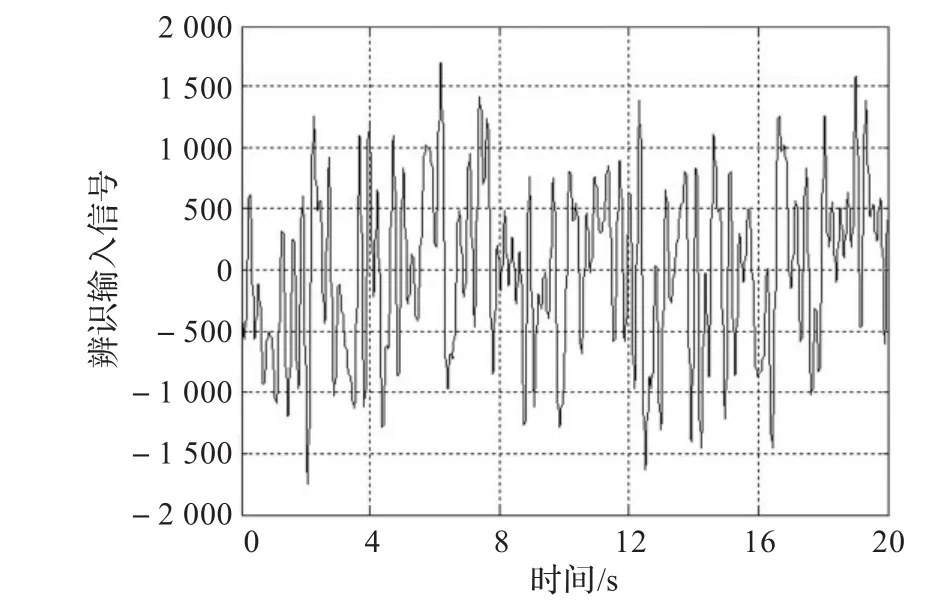
图6 质数倍多正弦辨识输入信号

图7 频率响应拟合对比
辨识拟合的频响数据G(jωk)对应模型参数分别为:

则角速度环的模型为:

3.2 模型验证
为验证所辨识模型的准确性,在上位机上使用Matlab/Simulink仿真软件搭建系统仿真模型,如图8所示。
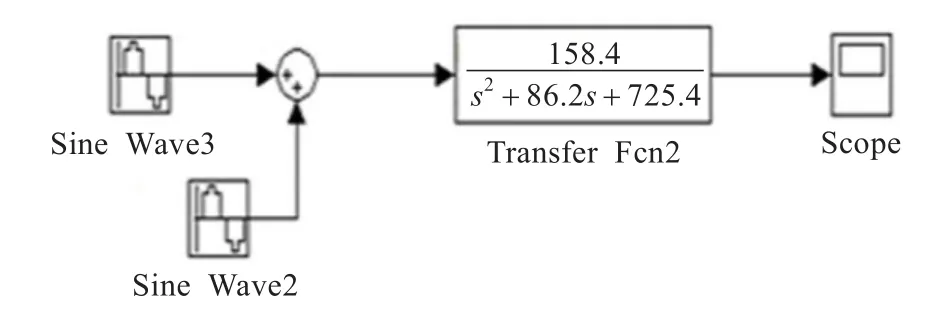
图8 模型验证实验仿真模型图
以式(5)生成模型验证输入信号,并激励雷达得到对应的角速度验证数据;将模型验证信号激励模型(6)得到输出为角速度辨识数据。角速度辨识数据与角速度验证数据的对比效果如图9。
使用多组不同信号重复多次以上步骤,发现系统实际输出和仿真模型输出的平均误差均在5%左右,说明该仿真模型能较好地反应系统的特性,所建模型已经较为精确,可以用来模拟系统的实际行为。
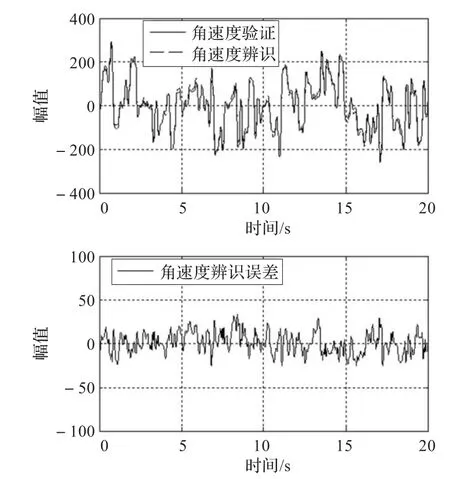
图9 角速度环模型验证
4 结束语
本文通过在非线性伺服系统中叠加摩擦补偿的方法实现了系统建模时的线性化处理,采用的随机相位多正弦辨识建模输入信号设计实现了对系统特性的充分激励,并利用遗传算法和高斯-牛顿算法分步辨识模型参数的方法实现了系统的精确建模,从而为系统性能分析和控制器设计打下了基础。
[1]韩江,屈胜利,王效点,等.伺服系统辨识及仿真与实现[J].航空计算技术,2005,35(4):50-52.
[2]李少远,蔡文剑.工业过程辨识与控制[M].北京:化学工业出版社,2005:4-6.
[3]潘立登,潘仰.系统辨识与建模[M].北京:化学工业出版社,2006:3-5.
[4]卢荣德,陈宗海,王雷.复杂工业过程计算机建模、仿真与控制的综述[J].系统工程与电子技术,2002,24(1):52-54.
[5]于伟.基于LuGre模型实现精密伺服转台摩擦参数辨识及补偿[J].光学精密工程,2011,19(11):37-40.
[6]向红标,裘祖荣,李醒飞.精密实验平台的非线性摩擦建模与补偿[J].光学精密工程,2010,18(5):1119-1123.
[7]刘树安,唐非.基于遗传算法的系统辨识方法研究[J].系统工程理论与实践,2007(3):134-139.
[8]梁青,张剑,王永.基于遗传算法的伺服系统摩擦模型参数辨识[J].仪表技术,2011(6):34-36.
[9]袁晓磊,白焰,董玲.基于遗传编程的非线性系统辨识[J].控制工程,2009,16(1):52-55.
[10]Schoukens J,Swevers J,Pintelon R,et al.Excitation design for FRF measurements in the presence of non-linear distortions[J].MechanicalSystemsand SignalProcessing,2004,18(4):727-738.
[11]邵玉平.高斯牛顿迭代法在地震计传递函数计算中的应用[J].四川地震,2006(1):4-6.
[12]吴玲,刘忠,卢发兴.全局收敛高斯-牛顿法解非线性最小二乘定位问题[J].火控雷达技术,2003,32(1):74-77.
[13]孟繁雪.非线性最小二乘问题的混合算法[D].上海:上海交通大学,2011:19-28.
[14]Fasano G,Lapariello F,Sciandrone M.A truncated nonmonotone Gauss-Newton method for large-scale nonlinearleast-squares problems[J].ComputationalOptimization and Applications,2006,34:343-358.
[15]张庆.MATLAB语言在非线性最小二乘估计中的应用[J].测绘与空间地理信息,2004,27(3):35-38.
