Research on active suspension control strategy based on fuzzy PID control
2015-02-24HongyanSHIShouliPANLipingLIUChunyouZHANG
Hong-yan SHI,Shou-li PAN,Li-ping LIU,Chun-you ZHANG*
(1College of Mechanical Engineering,Inner Mongolia University for the Nationalities College,Tongliao 028000,China)(2No.208 Research Institute of China Ordnance,Beijing 102202,China)(3Changchun Vocational Institute of Technology,Changchun 130000,China)
1 Introduction
The suspension system is an important part of the automobile,whose dynamic performance directly determines the automobile’s ride smoothness,handling stability and ride comfort.The parameters of traditional passive suspension are fixed,which can’t automatically change with environmental changes and guarantee a good control effect[1].By using the force generator to replace the passive suspension’s elastic and damping components,the active suspension can adjust control force in realtime based on road excitation and get the best control characteristics[2-3].Therefore,the research on the active suspension is widely valued currently.
For research on the active suspension system,scholars at home and abroad have done a lot of work and used a variety of control techniques,such as sliding mode control[4],neural network control[5],LQG optimal control[6],etc..Most of the methods which are based on mathematical models are applied in the simulation research for the automobile motion.In other cases,they just focus on the ride comfort,neglecting the handling stability[7].The automobile suspension system is a multi-variable,time-varying and nonlinear complex systems and a simplified mathematical model can’t not truly reflect the real control situation[8].According to such situation,this paper applies fuzzy reasoning to the active suspension control system of a quarter-car,and combines with PID control strategy and proposes a kind of control strategy based on fuzzy PID.Moreover,under the condition of level B and level C road excitation,tire dynamic load,body vertical acceleration and suspension dynamic travel are selected as the evaluation indicators for suspension performance.The simulation and test results verify the correctness of the model and the reliability of the control strategy.
2 Structure of suspension system and operating principle
2.1 Passive suspension
Passive suspension is composed of springs and dampers,which has a simple structure and is convenient to manufacture as shown in Fig.1.During the movement of automobiles,the stiffness and damping coefficient of the passive suspension are fixed and only at a particular condition,they are optimal.When speed,load as well as road conditions and other factors change,handling stability and ride comfort will get worse[9-10].
2.2 Active suspension
Active suspension is made up of springs,dampers and actuators,as shown in Fig.2.The active suspension effectively overcomes the shortcomings of the passive suspension and according to the road and the automobile condition detected,it can achieve the automatical adjustment of the suspension system’s parameters through a variety of feedback information[11-12].When the sensor detects a change in the road surface input,the processor will send a control signal to the actuator,which generates a corresponding control force to counteract the automobile body vibration and road excitation.Thus,the active suspension is the best combination to realize the stability and the ride comfort.

Fig.1 Simplified model of passive suspension
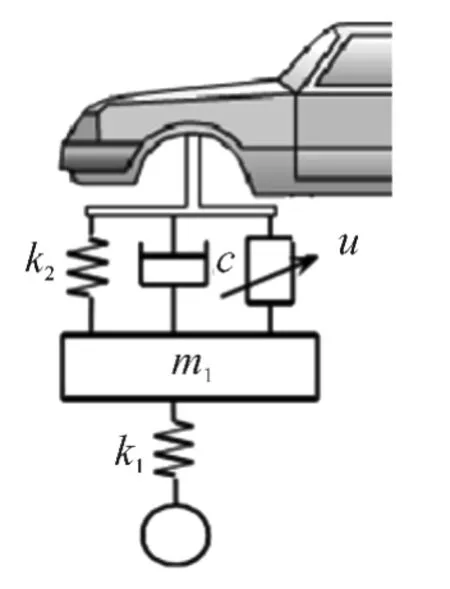
Fig.2 Simplified model of active suspension
3 Mathematical model
3.1 Quarter-car model(two degrees of freedom)of the active suspension
There are three kinds of commonly used automobile suspension system models:quarter-car model,half-car model and full vehicle model[13].Quarter-car model is often used in the research on control strategy of the suspension system [14].Half-car model is mainly used in the study about parameter match problem between the front and rear suspension[15].Full vehicle model is aimed at the study on the vertical,pitch and roll movement[16].This paper selects quartercar model with two degrees of freedom as the research object and takes kinematic analysis for it.While modeling,make the following assumptions:
1)Ignore the impact of air power on the automobile during moving.
2)The body of automobiles will not become deformed.
3)Ignore the impact of the engine vibration.
Differential equations of quarter-car model(two degrees of freedom)of the active suspension are described as follows:

Where:m1,m2respectively expresses tire mass and body mass;zs,zlrespectively expresses vertical displacement wheels and body;sexpresses road vertical excitation;k1,k2respectively expresses tire and suspension stiffness;cexpresses the damping coefficient of the shock absorber;uexpresses actuator control force.
Assume the state variables:x1=zl,x2=zs,x3=˙zl,x4=˙zs.ThenX=(x1,x2,x3,x4)Tand input variableU=(u,s)T.
Take tire dynamic load,by vertical acceleration and suspension dynamic performance as output of performance indicators.Then the output variables are:

The state space expression of active suspension model is written as follows:

Where:


3.2 Mathematical model of random road
Road excitation is the most important reason for automobile vibration.Usually different levels of road are represented by road roughness.Take Random road as input.Then the model can be expressed as[18-19]:

Where,G0is road roughness coefficient;w(t)is Gaussian white noise;vis automobile speed;f0is the below cut-off frequency.
4 Study on control strategy
4.1 PID control
Conventional PID control is a kind of control mode based on proportion-integral-differential,whose expression is written as:

Where,KPis Proportional gain coefficient;TDis Differential time constant;TIis Integration time constant;e(t)is the difference between the output and the input,namely the deviation signal;u(t)is The output signal of controller.
PID structure diagram is shown in Fig.3.

Fig.3 The structure of PID controller
For the conventional PID controller,it is difficult to guarantee control precision when the load and other external conditions change because parameters can’t be adjusted online.Therefore,it has some limitations in application and only suits situations where working condition is simple and the accuracy demand is low.
4.2 Active suspension with fuzzy PID control
4.2.1 Control principle
To ensure the control precision,this paper designs a fuzzy PID controller by combining fuzzy control and traditional PID control.This controller takes erroreand deviation changeecas input variables and selects ΔKp,ΔKiand ΔKdas output variables.The design not only retains the advantages of the PID control strategy,which is simple and easy to realize,but also can adjust PID parameters in real-time.Thus the controller meets different demands for PID control parameters under different working conditions and ensure the control precision.The structure is shown in Fig.4.

Fig.4 Structure of fuzzy PID controller
4.2.2 Rules of fuzzy control
When the controller parameters are adjusted online,the following principles should be considered.
1)When the deviation|e|is large,in order to improve the response speed of the system the smaller and the larger should be taken.Then take zero to reduce overshoot.
2)When the deviation|e|is moderate,take the moderate and the smaller to maintain fast response.
3)When the deviation|e|is small,sum should be increased and select properly to enhance the anti-jamming capability and improve system stability.
Based on the above principles,consider practical experience and the influence of|ec|.Then make the specific fuzzy rules of parameters.They are shown in Table 1 to Table 3.

Table1 Fuzzy control rule table of ΔKp

Table2 Fuzzy control rule table of ΔKi

Table3 Fuzzy control rule table of ΔKd
According to the model rule table,adjust the PID parameters online.The formulas are written as follows:

Where:Kp0,Ki0andKd0represent the initial values of the PID parameters.Through this relationship,the fuzzy controller will be able to tune PID parameters online and make input consistent with the ideal.
5 Simulation analysis
5.1 Road excitation
Road input is an important indicator testing the suspension performance.Real roads are often very complex and fluctuate at random.This study selects level B and leve C road as the reference input.The simulation model is set up in the Simulink section of MATLAB,as shown in Fig.5.The random signal simulation curve can be gained,as shown in Fig.6 and Fig.7.
3.“桂林国际智慧健康产业园”项目突出打造中医养生养老主题。该产业园位于广西桂林市临桂区中隐北路,作为2015年广西政府重大统筹的建设项目,是全国中医健康示范区,也是2015年全国优秀健康旅游项目,总投资102亿元,分三期进行建设,该项目的建设按照5A景区的标准进行,总体布局“一街三院”,即崇华中医街、广西生命与健康国际职业学院、桂林老年病医院、老年护理院,以此为依托,将该产业园区打造成为集生命科学研究、养生养老、健康保健、医疗护理、生态旅游、教育培训等功能为一体的国际健康养生养老基地。其一期建设项目于2017年11月底竣工并投入运营。

Fig.5 Simulation model of road input

Fig.6 Excitation curve of level B

Fig.7 Excitation curve of level C
5.2 Simulation
According to the model and the control strategy es-tablished,the fuzzy PID control system model of the active suspension is established in the Matlab/Simulink,as shown in Fig.8.

Fig.8 Fuzzy PID control system model of the active suspension
During the simulation,vehicle speedv=20 m/s,tire qualitym1=45 kg,body massm2=300 kg,damping coefficientC=3 000 N·s/m,spring stiffnessk2=3 000 N/s,simulation time is 10 s.The tire dynamic load,body vertical acceleration and suspension dynamic travel are taken as performance indicators.In order to inspect control effects,the simulation data of passive suspension are taken as a reference.The results are shown in Figs.9 to 14.

Fig.9 Tire dynamic load on level B road

Fig.10 Body vertical acceleration on level B road

Fig.11 Suspension dynamic travel on level B road

Fig.12 Tire dynamic load on level Croad

Fig.13 Body vertical acceleration on level Croad

Fig.14 Suspension dynamic travel on level Croad
To further illustrate the differences in the dynamic characteristics between the active suspension and the passive suspension based on the fuzzy PID control,the rms of all data in simulation curves are made and compared in the list,as shown in Table 4.

Table4 Comparison of simulation results
Simulation results show that compared with the passive suspension,active suspension can greatly reduce the effects of road excitation on automobile dynamic performance.Moreover,Fuzzy PID control strategy has high control accuracy and strong robustness for the active suspension.It has a certain practicality.
6 Road test
In order to verify the simulation results and the correctness of the control strategies,road tests are conducted for the real vehicle using the fuzzy PID control established.Due to limited technical conditions,only the body vertical acceleration test is done.
Road conditions:test site is the cement road which conforms with Class B road and <2%slope.
Test equipment:a homemade modified vehicle,CDSP dynamic data collection instrument,ULT24 type piezoelectric acceleration sensor,a control system platform.
Test conditions:Tests are conducted under 40 km/h and 60 km/h speed in Class B road;The vehicle is tested when passing bump under the same condition.Test results are shown in Fig.15 and 16.
From the test results,compared with the passive suspension,the magnitude of the vertical acceleration of the vehicle using fuzzy PID control under various testing conditions significantly reduces.This result indicates that using fuzzy PID control on the active suspension can effectively improve the vehicle’s ride smoothness.The test results and simulation results are consistent and verify the correctness of the findings.

Fig.15 Test results of the vehicle in Class B road

Fig.16 Test results of the vehicle when passing bump
7 Conclusions
Dynamic characteristic of the suspension system is an important measure of car performance.Also,it is a key factor affecting ride comfort and handling stability of the automobiles.For the problems of the passive suspension,this paper has studied the control strategy of the active suspension and draws the following conclusions:
1)A model of the active suspension is established for the quarter-car and dynamic analysis is done to identify factors that affect the dynamic characteristics of the automobile.Meanwhile,according to the evaluation conditions and standards of the ride comfort and handling stability,tire dynamic load,body vertical acceleration and suspension dynamic travel are selected as the evaluation measure for suspension performance.
2)The model is applied to the PID control to establish the fuzzy PID control strategies.Then suspension parameters can be adjusted online so that the actual output is always consistent with the ideal value of the system to adapt to changing external conditions.The simulation results show that the strategy can make the system response fast and anti-interference capacity strong.
3)Compared with passive suspension,the active suspension using the fuzzy PID control strategy can effectively overcome road excitation.Take level C road as an example.Tire dynamic load decreases 41.7%.Body vertical acceleration decreases 47.9%.Suspension dynamic travel reduces 15.9%.The results show that ride comfort and handling stability of the car have been improved a lot.
4)Compared with the half-car model(four degrees of freedom)and full vehicle model(seven degrees of freedom)of the active suspension,the quarter-car model(two degrees of freedom)is simple and can make research on control strategy come true.The simulation and test results verify that the model is correct.
Reference
[1]Eltantawie M A.Decentralized neuron-fuzzy control for half car with semi-active suspension system.International Journal of Automotive Technology,2012,13(3):423-431.
[2]Yoshimura T,Emoto Y.Steering and Suspension System of a Full Car Model Using Fuzzy Reasoning and Disturbance Observers[J].Vehicle Autonomous Systems,2003(1):363-384.
[3]Qiu Quan,Zheng Ling.Sliding Mode Observation and Control for Semi-Active Suspension Based on Self-Sensing Magneto Rheological Damper[J].Chinese Journal of Automotive Engineering,2013,5(9):345-353.
[4]WANG Dong.Comparative study on performance of active suspensions based on optimized PID and neural PID control[J].Machinery Design&Manufacture,2011(10):96-98.
[5]Liu Xiaobin,Liu Xiaojin.Design and Simulation of Active Suspension System Based on the LQG Controller[J].Journal of Lanzhou University of Technology,2014,40(2):33-36.
[6]Yoshimura T,Emoto Y.Steering and Suspension System of a Full Car Model Using Fuzzy Reasoning and Disturbance Observers[J].Vehicle Autonomous Systems,2003(1):363-384.
[7]Du H,Yim Sze K,Lam J.Semi-active H∞ control of vehicle suspension with magneto-rheological dampers[J].Journal of Sound and Vibration,2005,283(3):981-996.
[8]Thompson A G,Pearce C E M.Performance index for a preview active suspension applied to a quarter-car model[J].Vehicle System Dynamics,2001,35(1):55-66.
[9]Sharkawy A.Adaptive fuzzy control of active suspension systems[J].Journal of Engineering and Applied Science,2005,52(4):779-795.
[10]Alyaqout S F,Papalambros P Y,Ulsoy A G.Combined design and robust control of a vehicle passive/active suspension[J].International Journal of Vehicle Design,2012,59(4):315-330.
[11]Yim S,Park Y,Yi K.Design of active suspension and electronic stability program for rollover prevention[J].International Journal of Automotive Technology,2010,11(2):147-153.
[12]Eltantawie M A.Decentralized neuro-fuzzy control for half car with semi-active suspension system[J].International Journal of Automotive Technology,2012,13(3):423-431.
[13]Hasbullah F,Faris W F.An evaluation of LQR and fuzzy logic controller for active suspension using half car model[J].International Journal of Vehicle Noise and Vibration,2010,6(2-4):200-214.
[14]Sakman L E,Guclu R,Yagiz N.Fuzzy logic control of vehicle suspensions with dry friction nonlinearity[J].Sadhana,2005,30(5):649-659.
[15]Demir O,Keskin I,Cetin S.Modeling and control of a nonlinear half-vehicle suspension system:a hybrid fuzzy logic approach[J].Nonlinear Dynamics,2012,67(3):2139-2151.
[16]Kumar M S,Vijayrangam S.Design of LQR controller for active suspension system[J].Indian Journal of Engineering and Material Sciences,2006,13(7):173-179.
猜你喜欢
杂志排行

机床与液压的其它文章
- Co-simulation and consumption analysis of wheel loader on negative loading condition
- Study on rigid-flexible coupling multi-body dynamic model and simulation for wind turbine
- Introduction of the Fluid Control Engineering Institute of Kunming University of Science and Technology
- Influence of the underlap in the poppet valve on its performance
- The research on engine stable frame report parsing of Boeing 747-400 by QAR data
- Comprehensive reliability evaluation of foreign high-end gantry machining Center