一种用于微小型无人直升机试验研究的6自由度支撑平台
2015-02-24籍勇翔赵逸伦
籍勇翔,赵逸伦,乔 兵
(南京航空航天大学航天学院,江苏 南京 210016)
一种用于微小型无人直升机试验研究的6自由度支撑平台
籍勇翔,赵逸伦,乔 兵
(南京航空航天大学航天学院,江苏 南京 210016)
为了保障微小型无人直升机动力学建模与控制试验的安全,避免在试验或测试中造成人员伤害和直升机及其机载设备的损毁,设计了一种被动式微小型无人直升机6自由度支撑平台。该平台由具有被动重力平衡能力的平行四边形机构组成,无人直升机与平台之间采用球铰连接,从而使得直升机能够在所允许的范围内作任意方向的飞行、姿态机动或悬停在任意位置而不受支撑平台重力的影响。为了评价机构的重力平衡效果,在ADAMS环境下对系统进行了仿真,并给出了仿真结果。
无人直升机;UAV;MUAV;重力平衡;平行四边形机构
0 引言
微小型无人机是一类装载了摄像机、传感器、通信系统或其他载荷的微小型空中无人飞行器(UAV/MUAV)。UAV/MUAV最初应用于军事领域,随着技术的不断进步,人们日益注意到UAV/MUAV在诸如交通管理、灾害监控和搜索等各种非军事领域的应用前景。近十几年来,包括美国、欧盟和中国在内的很多国家,不断加大对微小型无人机的研发资助力度,无人机的设计、制造、控制和运用技术已成为目前的研究热点之一。
由于直升机较固定翼飞机而言具有能够任意方向飞行、悬停、垂直起降等灵活的机动飞行性能,因此大多数研究机构选用直升机作为微小型无人机的研究平台[1]。微小型无人直升机飞行控制的核心问题是姿态控制。为了获得可行的姿态控制系统参数,需要在地面对直升机进行试验建模,并且姿态控制系统在投入实际使用或试飞之前,亦必须首先在地面对全系统进行动态测试,以确保万无一失。为了避免在试验或测试中造成人员伤害和直升机及其机载设备的损毁,一般需要设计专门的保护装置,然后将无人直升机安装在保护装置上进行姿态动力学试验建模和姿态控制试验[2]。
到目前为止,国内外研究人员根据各自的需要已设计了几种专门用于研究微小型无人直升机动力学建模与控制的地面辅助机构。为了试验验证无人直升机的多变量控制器算法,文献[2]设计制造了一个6自由度的无人直升机支撑平台,如图1(a)所示。该机构由上下两个完全相同的三角形基座组成,下基座与地面固连,两个三角形基座之间通过6根杆连接,杆1-3通过单自由度的旋转关节与下基座三角形的3个顶点连接,杆1-3与杆4-6之间以及杆4-6与上基座三角形顶点之间通过具有2个旋转自由度的关节连接。该机构的特点是上下两个基座始终保持平行,且上基座不能绕垂直方向旋转,即上基座具有3个移动自由度。由于直升机与上移动基座之间通过球铰连接,因此直升机可以在一定的范围内(2m×2m×2m)作6自由度飞行。该机构原理简单,实施容易,起飞前飞机的重量由机构承担,而当飞机起飞以后,机构将在飞机的带动下作被动运动,因此基座与杆必须采用轻质材料制造,否则机构本身的惯性和重力将直接影响直升机的自由飞行。为了研究无人直升机的非线性控制策略,文献[3]设计了一种配重型的试验平台,如图1(b)所示,配重的目的是平衡支撑杆的重力,该机构显然不能支持直升机的6自由度飞行控制测试。文献[4]设计了一个2自由度的微小型无人直升机试验架,如图1(c)所示,但该试验架只允许直升机作垂直方向的升降和偏航机动,其原理与方案(b)基本相同,但没有对支架的重力进行平衡,直升机其他方向的自由度被机械限制,因此该机构只能用于直升机的悬停飞行试验。文献[5]在研究微小型无人直升机姿态控制系统时,通过一个3 自由度的轴承将直升机与固定支架连接,使得直升机能绕轴承中心在3个方向上自由转动,但没有平移运动, 即直升机被强行限制在一点。文献[6-8]设计了一种小型无人直升机试验平台,如图1(d)所示,该支架的主体采用了一个平行四边形机构,直升机与支架的连接采用了具有3个旋转自由度的机器人腕部机构,因此允许直升机在一个球壳内作全自由度机动飞行,支架的重力平衡采用了气动方式。在上述方案中,直升机基本上都是处于一种受限飞行状态,支撑机构在保证人员和设备安全的基础上,为直升机提供了一定自由度的飞行空间。对于微小型无人直升机的地面测试试验,最理想的方案是在保证安全的前提下为飞机提供6自由度的全向飞行空间,同时要将支撑机构的重力和惯性对飞机的影响降到最低。根据这一需求,本文研制一种被动式微小型无人直升机6自由度试验支撑平台,该平台采用具有被动重力平衡能力的平行四边形机构组成,无人直升机与平台之间采用球铰连接,从而使得微小型无人直升机能够在所允许的范围内作任意方向的飞行、姿态机动或悬停在任意位置而不受支撑平台重力的影响。为了评价机构的重力平衡效果,在ADAMS环境下对系统进行了仿真,并给出了仿真结果。
1 被动重力平衡技术
被动重力平衡技术在工业机器人领域应用广泛,其主要目的是通过适当的措施将机器人自重在关节上产生的力矩抵消掉,从而提高机器人的动静态性能。实现被动重力平衡的技术途径主要有两条:一是通过配重改变机器人系统的质量分布,使得连杆的中心与关节旋转中心重合,但配重带来了额外的质量,对机器人的动态性能不利;第二种方法是通过弹簧来抵消机器人的重力势能的影响,这种方法由于几乎不增加系统的质量,并且容易实现,因而

图1 微小型无人直升机试验架
获得广泛应用。本文利用具有重力平衡能力的弹簧平行四边形机构来构建面向微小型无人直升机测试的6自由度支撑平台。
图2所示的是一个弹簧平行四边形机构,图中各符号的含义为:m11,m12和m13分别是杆1-3的质量;l1是杆1-2的长度;a1和b1是弹簧的安装位置;k1是弹簧的弹性系数;r11,r12和r13分别是杆1-3的质心位置;θ1是平行四边形的旋转角度;L1为弹簧的长度。若以X0轴作为参考平面,对图2作静态分析,并假设弹簧的初始长度为L10且r11=r12=r1,则机构的总势能可由下式计算得到:
P1=-(m11+m12+m13l1/r1)gr1cosθ1-
根据文献[9]的做法,按照图3的方式安装弹簧,可以使得L10=0,则机构的势能式(1)可表示为:
P1=-((m11+m12+m13l1/r1)gr1-

图2 弹簧平行四边形机构
从式(2)可以看出,通过式(3)选择弹性系数k1,可以使得式(2)中的第一项为0:
从式(3)可以看出,k1是一个常数,与θ1无关,进一步观察可以发现,若按式(3)选择弹性数,机构的势能也是与θ1无关的一个常数,即机构可以平衡在θ1∈(0,180°)的任意位置,平行四边形-弹簧机构的这一特点被人们用来进行重力平衡。

图3 弹簧的安装方法
将图3推广到n个平行四边形-弹簧机构串联的情况,并增加一个旋转自由度(如图4所示),则可以将机构的终端平衡在一定工作空间内的任意一点。
以X0轴作为参考平面,对图4作静态分析,并假设弹簧kn的初始长度为Ln0且ri1=ri2=ri,则机构的总势能可由下式计算得到:
由于机构能够平衡在任意位置,根据能量守恒定理,机构的势能应该是个常数,即:
其中θ=(θ1,θ2,…,θn)是机构的姿态变量。将式(4)代入式(5)可得到式(6):
[(mi1+mi2+mi3li/ri)gri-kiaibi]sinθi-
根据式(6),可求出各弹簧的弹性系数为:
ki=
但一般来说,制造一个弹性系数刚好等于ki的弹簧是困难的,因此在设计图4所示的平衡机构时,可以将弹簧的安装位置ai和bi做成可调节的,这样可以先根据式(7) 求得的弹性系数初选一个标准弹簧,然后通过微调ai和bi使得机构具备任意位置重力平衡的能力。

图4 串联平行四边形机构
2 6自由度微小型无人直升机测试支撑台
采用上述被动重力平衡思想,设计如图5所示的直升机飞行试验支架。
圆柱套筒与固定基座通过单自由度的旋转关节连接在一起,两个串联的平行四边形机构安装在套筒上,可以随套筒一起绕固定基座轴线旋转,直升机通过球铰安装在平衡机构末端的支撑杆上,因此,直升机具有六个运动自由度。为了防止直升机由于失控或其它原因向下坠落时支撑杆触地冲击造成破坏,在支撑杆的下端设计了带有万向轮的缓冲保护装置。直升机起飞前,系统在直升机自重的作用下向下运行,直至万象轮触地。需要指出的是,平衡机构并不平衡直升机的重力,而仅仅是将支架的重力平衡掉,即m23中并不包括直升机的质量。平衡弹簧的弹性系数根据式(7)计算求得。对于图5的机构,为了后续仿真的需要,取以下两组参数:
Case1:
m11=m12=m21=m22=1.0kg,m13=1.25kg,m23=2.0kg,l1=l2=0.5m,a1=a2= 0.4m,b1=b2= 0.15m。
将上述参数带入式(7),则可计算出平衡弹簧的弹性系数分别为k1= 510.76N/m,k2=245.17N/m。
Case2:
m11=m12=m21=m22=0.5kg,m13=0.2kg,m23=1.25kg,其他结构参数与Case1一样。
将上述参数带入式(7),则可计算出平衡弹簧的弹性系数分别为k1= 241.10N/m,k2=143.01N/m。

图5 微型无人直升机飞行试验支架
3 仿真研究及其结果
计算机仿真的目的是检测试验直升机飞行的过程中支撑架对直升机升力的影响。为此,根据图5、Case1和Case2中的结构参数建立如下的Adams仿真模型(如图6),其中直升机的质量mh=4.0kg。
由于直升机的空气动力学模型在Adams中难以模拟,为了不失一般性,通过在直升机质心定义运动的方法使得直升机在空间飞行一个轨迹,然后将球铰上的力记录下来。直升机质心的运动轨迹函数如下:
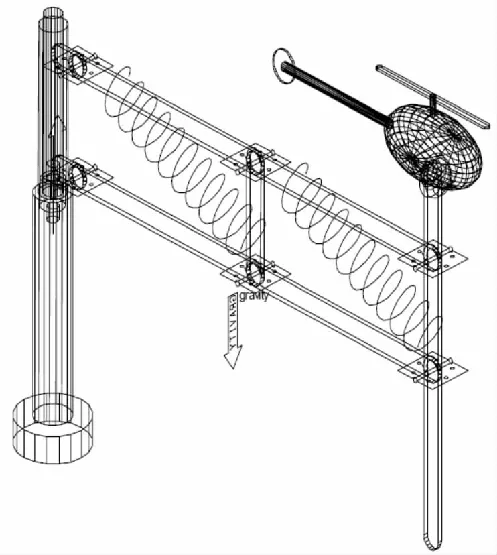
图6 微型无人直升机飞行试验架仿真模型
直升机偏航角的变化规律为21sin(0.05πt)(单位为度),俯仰角和滚转角保持不变。图7为直升机质心的轨迹。

图7 无人直升机质心的运动轨迹
仿真中直升质量保持不变,然后根据Case1和Case2改变支架的质量,并将联接直升机和支撑平台的球铰上的力记录下来,如图8-10所示。
球铰上的力对于直升机的飞行升力来说实际是一种干扰,显然是越小越好。从图8、图9可以看出,当直升机稳定飞行后,球铰上三个方向的分力维持在一个很小的范围内,仿真中发现,当直升机悬停飞行时,球铰上的力基本上为零。这一结果表明,支架对直升机飞行升力的影响很小。进一步对比图8和图9可以发现,支架的质量越大,球铰上的力也越大,这是由于支架的质量越大其惯性也越大的缘故,这一情况表明,在制作支架时应尽量选用轻质材料。

图8 球铰上的力(Case 1)
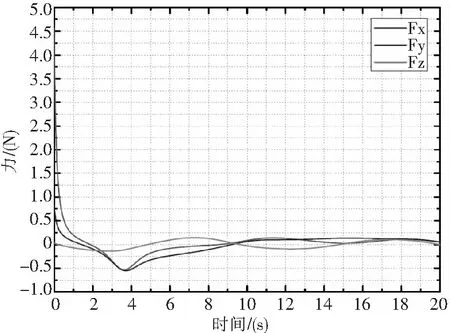
图9 球铰上的力(Case 2)

图10 球铰上的力(Case 1)
图10是将平衡弹簧去掉的情况,其他参数与Case1的一样,此时球铰上的力变得很大,因为直升机不但要平衡自身重力,同时还要克服支架重力和惯性力的影响,这从另一个侧面表明了基于被动重力平衡机构的直升机飞行试验支架的优点。
4 结束语
根据弹簧平行四边形机构的重力自平衡原理,设计了一种用于微小型无人直升机试验研究的被动式6自由度平台。该支撑平台由具有被动重力平衡能力的平行四边形机构组成,无人直升机与平台之间采用球铰连接,从而使得微小型无人直升机能够在所允许的范围内作任意方向的飞行、姿态机动或悬停在任意位置而不受支撑平台重力的影响。Adams仿真结果表明,由于采用了被动重力平衡技术,该支撑平台的重力对飞行升力的影响将维持在一个很小的水平,而平台惯性的影响可以通过采用轻质材料制造支架本体来解决。
本文提出的方案结构简单、实施方便,克服了固定支撑平台的缺陷,能够有效地保障微小型无人直升机动力学建模与控制试验的安全,避免在试验或测试中造成人员伤害和直升机及其机载设备的损毁,从而为小型无人直升机的研究活动提供一个性价比非常高的试验平台,具有很大的工程应用价值。
[1] 淳于江民,张 珩.微型无人直升机技术研究现状与展望[J].机器人技术与应用,2004(6):6-11.
[2] Weilenmann M F, Geeringt H P. Test Bench for Rotorcraft Hover Control[J]. Journal of Guidance, Control and Dynamics, 1994, 17(4): 729-736.
[3] Avila Vilchis J C, et al. Nonlinear modeling and control of helicopters[J]. Automatica, 2003(39): 1583-1596.
[4] Dzul1 A, Lozano R, Castillo P. Adaptive control for a radio-controlled helicopter in a vertical flying stand[J].International Journal of Adaptive Control and Signal Process, 2004(18): 473-485.
[5] 范才智,宋宝泉,孙 鹏,等.微型无人直升机姿态控制系统设计和试验研究[J].制造业自动化,2008,30(11):64-67.
[6] Vitzilaios N I, Tsourveloudis N C. Safe Test Flights for Small Rotorcrafts, Informatics in Control, Automation and Robotics[Z], LNEE 37, 153-166.
[7] Vitzilaios N I, Tsourveloudis N C. An Experimental Test Bed for Small Unmanned Helicopters[J]. J. Intelligent Robot System, 2009( 5)4: 769-794.
[8] Vitzilaios N I, Tsourveloudis N C. Altitude Control of Small Helicopters Using a Prototype Test Bed[C]. International Conference on Informatics in Control, Automation and Robotics, 2008: 77-84.
[9] Herve J M. Design of Spring Mechanisms for Balancing the Weight of Robots[C]. Proceedings of 6th CISM-IFToMM symposium on Theory and Practice of Robots and Manipulators, 1986: 564-567.
A 6-DOF Testing Stand for the Experimental Research of Micro Unmanned Helicopters
JI Yongxiang, ZHAO Yilun, QIAO Bing
(Department of Astronautic Control, College of Astronautics Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The conceptual design of a passive supporting stand with 6 degrees of freedom for micro unmanned helicopter test was proposed. The test stand aimed to securing the activities such as the dynamic modeling and controller designing of micro unmanned helicopter such that the damage or crash of the helicopter and its attached loads could be avoided in the experiment. The main component of the stand was a serially articulated parallelogram mechanism in which spring balancing technique was used to passively balance the gravity of the stand. The micro unmanned helicopter was supported on the end of the mechanism through a spherical joint. The helicopters supported in such a stand could fly in any direction or hover in any position within the permitted space of the stand. In order to verify the gravity balancing effectiveness of the stand, the simulations in ADAMS were conducted and the results of the simulations were presented.
unmanned helicopter; UAV; MUAV; gravity balance; parallelogram mechanism
2015-04-06
籍勇翔(1990-),男,吉林辽源人,硕士研究生,主要研究方向:航天器结构与机构设计。
1673-1220(2015)04-063-06
TP24 ; V211.73
A