A Validation of the Multivariate and Minimum Residual Method for Cloud Retrieval Using Radiance from Multiple Satellites
2015-02-24XUDongmeiThomasAULIGNandXiangYuHUANG
XU Dongmei,Thomas AULIGN´E,and Xiang-Yu HUANG∗
1Collaborative Innovation Center on Forecast and Evaluation of Meteorological Disasters, Nanjing University of Information Science&Technology,Nanjing210044
2National Center for Atmospheric Research,Boulder,Colorado80307,USA
A Validation of the Multivariate and Minimum Residual Method for Cloud Retrieval Using Radiance from Multiple Satellites
XU Dongmei1,2,Thomas AULIGN´E2,and Xiang-Yu HUANG∗2
1Collaborative Innovation Center on Forecast and Evaluation of Meteorological Disasters, Nanjing University of Information Science&Technology,Nanjing210044
2National Center for Atmospheric Research,Boulder,Colorado80307,USA
TheMultivariate andMinimum Residual(MMR)cloud detection and retrieval algorithm,previously developed and tested on simulated observations and Advanced Infrared Sounder radiance,was explored and validated using various radiances from multiple sensors.For validation,the cloud retrievals were compared to independent cloud products from CloudSat,MODIS (Moderate Resolution Imaging Spectroradiometer),and GOES(Geostationary Operational Environmental Satellites).We found good spatial agreement within a single instrument,although the cloud fraction on each pixel was estimated independently.The retrieved cloud properties showed good agreement using radiances from multiple satellites,especially for the vertically integrated cloud mask.The accuracy of the MMR scheme in detecting mid-level clouds was found to be higher than for higher and lower clouds.The accuracy in retrieving cloud top pressures and cloud profles increased with more channels from observations.For observations with fewer channels,the MMR solution was an“overly smoothed”estimation of the true vertical profle,starting from a uniform clear guess.Additionally,the retrieval algorithm showed some meaningful skill in simulating the cloudy radiance as a linear observation operator,discriminating between numerical weather prediction (NWP)error and cloud effects.The retrieval scheme was also found to be robust when different radiative transfer models were used.The potential application of the MMR algorithm in NWP with multiple radiances is also discussed.
cloud retrieval,radiance,cloud fraction,observation operator
1. Introduction
Cloud parameters,such as cloud top pressure and effective cloud fraction,are useful for cloud initialization in numerical weather prediction(NWP)(e.g.,Wu and Smith, 1992;Bayler et al.,2000;Hu et al.,2006).Since clouds vary considerably in their horizontal and vertical extent due to the circulation pattern of the atmosphere and the distribution of oceans and continents,it is crucial to develop a fast and effcient algorithm to estimate real-time cloud information in NWP studies(Aulign´e et al.,2011)to achieve fresh cloud analysis products.
Modern polar orbiting and geostationary satellites orbiting Earth provide continuous fows of data with a high spectral resolution and a full geographical coverage.Measurement of cloud properties from satellites can supplement surface observations andin-situstudies by detecting cloud properties globally with larger temporal and spatial scales (Rossow et al.,1993).The International Satellite Cloud Cli-matology Project(ISCCP)(Rossow and Schiffer,1991)has developedcloud detection schemes using visible and infrared window radiances.The ISCCP comprises polar and geostationary satellite data,providing a fundamental,reference dataset of global cloud properties for many years.However,the ISCCP data are usually not real-time and not related to physical changes in the atmosphere(Evan et al.,2007). Chahine(1975)proposed a method based on the principle of minimization of the root-mean-square difference between observed and calculated radiances to determine cloud top height and cloud amount.Similarly,the CO2slicing technique directly employs radiance observations with or without other prior information(Smith et al.,1974;Menzel et al., 1983;Smith and Frey,1990)to obtain cloud parameters by comparing cloudy and clear radiances in the CO2emission band.The Minimum Local Emissivity Variance(MLEV) method(Huang et al.,2004)calculates local variances of spectral cloud emissivity for a number of frst-guess cloud pressure levels and fnds the optimal solution for the singlelayer cloudemissivity spectrum.Encouragedby the merits of variationalmethodsforretrievingcloudparameters(Eyreand Menzel,1989;Li et al.,2004),a new cloud retrieval and de-tection method,the Multivariate Minimum Residual(MMR) algorithm,has been introduced and preliminarily validated (Aulign´e,2014a;2014b).
The MMR approach differs from other cloud retrieval schemes in several aspects:(1)It can retrieve both cloud masks(with cloudy/clearbinaryinformation)and multi-layer clouds for each feld-of-view,instead of solely providing cloud mask information,as is the case for the approach at the US National Oceanic and Atmospheric Administration’s (NOAA)Satellite and Information Service(NESDIS)(Goldberg et al.,2003),or single-layer clouds as in other studies (e.g.,Pavelin et al.,2008;McNally,2009);(2)It is feasible to obtain cloud profles using the MMR scheme on any grid network with a host model,usually with which the background feld is obtained and on which grid the MMR scheme is conducted using a radiative transfer model;(3)The MMR algorithm is effcient and simple to run,which is particularly suitable for real-time NWP application.The observed radiance and backgroundfeld are two major inputs for the MMR scheme,without the need forother priorinformation[e.g.the channels’peakheights(McNally andWatts,2003)],or the simultaneous availability of sources from independent imagers [Moderate Resolution Imaging Spectroradiometer(MODIS), Advanced Very High Resolution Radiometer(AVHRR),Advanced Infrared Sounder(AIRS)–Visible/Near Infrared(Vis-NIR)];(4)TheMMR schemecanmakesynergisticuse ofany satellite radiance observations with infrared channels available,which makes retrieving clouds in real-time possible for both regional and global domains.
Aulign´e(2014b)conductedapilotvalidationoftheMMR scheme based on AIRS,and found it to be comparable to the cloud detection method of McNally and Watts(2003)in terms of the identifcation of cloud-free channels,instead of discarding the whole pixel when the cloud is detected.The cloud liquid water and ice mixing ratios retrievedfrom MMR cloud fractions using AIRS observations improved the frstguess hydrometer felds for the data assimilation(Aulign´e, 2014b)with the semi-empirical method of Hu et al.(2006). In Aulign´e(2014b),the use of an MMR cloudy radiance operator to assimilate cloudy radiances was applied to AIRS observations for preliminary testing purposes.
As independent output cloud information from the MMR scheme is directly related to the input radiance according to the channel numbers,it is especially interesting to examine theMMRcloudretrievalalgorithmintheuseofmoresatellite sensors,evenwith smallerchannelnumbers.Inthisstudy,the MMR algorithm of Aulign´e(2014a,2014b)is assessed and validated using radiances from various satellites in terms of retrieving 3D cloud fractions on each model level of the host model for each pixel.The MMR algorithm,as a cloudy radiance operator for multiple sources of radiance observations, is also further validated.
This paper is arranged as follows.A brief description of theMMRalgorithmis providedinthefollowingsection.Section 3 describes the radiance observations,the background model with its data assimilation system,and the radiative transfer models(RTMs)used in this study.Experiments designed to account for the variety of cloudy characteristics are also illustrated in section 3.Section 4 examines the robustness oftheMMR algorithmbycomparingthe cloudretrievals with other cloud products and among instruments.A validationoftheMMRalgorithmas acloudyradianceoperator,and sensitivity tests with different RTMs,are provided in section 5.Conclusions and future work are outlined in section 6.
2. The MMR cloud retrieval scheme
The MMR scheme(Aulign´e,2007;2014a;2014b)is an approach towards retrieving cloud fractions and cloud top pressures.The modeledRνcis calculated as
with
whereRνkis the radiance calculated assuming the existence of an overcast black cloud at the model levelkof the host model,with which the MMR algorithm is conducted,andRνris the radiance calculated under clear sky conditions by the RTM from the model frst guess at wavenumberν.Here, the vectorc=c1,c2,...,cnis the array of vertical cloud fractions for n model levels,andc0is the fraction of clear sky. Figure 1a shows the schematic for one pixel.A cloud with a given fraction on one model level is considered to block the radiation from its lower levels.The radiation originating from the lower levels contributes to the observation from satellites only with the residual fractions on the current level. Hence,there are no overlap cloud issues in the MMR framework.The MMR scheme retrieves the cloud fractionckfor each model vertical levelkby minimizing a cost function,
whereRνois the observed radiance at wavenumberν.The algorithm,N2QN1(double-precision constrained version of the minimization routine,M1QN3),developed by Gilbert and Lemare´chal(1989)at the National Institute for Research in Computer Science and Control(INRIA),France,is used in constrained minimization by forcing the cloud fractionsc=c1,c2,...,cnandc0between 0 and 1.The outputc=c1,c2,...,cnrelies heavily on the independent input radiance informationfromdifferentchannels.Thus,the MMR scheme is especially suitable for hyperspectral infrared sounders.As Eq.(2)minimizes the residual between observed and modeled radiances,the Planck function makes it diffcult to compare radiance at different frequencies.In this study,we normalize the residuals by the clear radiance calculated by the RTM as
The training of the cloud retrieval scheme consists of fndingc=c1,c2,...,cnthat allows the best ft between the cloudy radiances and the observations.Apart from the cloud fractions retrieved directly by the algorithm,the cloud top pressures can also be derived.The cloud top levelktop is an indirect diagnostic of the MMR scheme,which is also used in this study for validation.ktop is searched and determined as the last vertical level from surface to top,at which the retrieved cloud fraction is larger than 1%,i.e.,
The model output for pressure on the levelktop is then used to determine the cloud top pressure.
3. Data,models,and experiment design
Satellite radiances used in this study include those from MODIS,AIRS,the Infrared Atmospheric Sounding Interferometer(IASI),the Geostationary Operational Environmental Satellites(GOES)Sounder,and the GOES Imager.These measurements include radiances from visible,near-infrared, and infrared spectral regions with high-spectral resolutions and are available at spatial scales of a few hundred meters to a few tens of kilometers.Table 1 shows the instruments’native resolutions,swath widths,and channels used.The twicedaily temporal resolution from polar orbiters and continuous fow of observations from geostationary satellites make these instruments well suited for the comprehensive study of some signifcant weather events.It is interesting to conduct intercomparisons among cloud retrievals from these instruments.
3.1.Data and instruments
MODIS,onboard the National Aeronautics and Space Administration(NASA)Earth Observing System(EOS) Terra or Aqua satellites,provides multi-spectral broadband measurements and cloud products(details available at http://modis.gsfc.nasa.gov/).It scans radiancesin 36 spectral bands (ranging in wavelength from 0.4µm to 14.4µm)from an orbital altitude of 705 km with a rather high spatial resolution (~1 km).
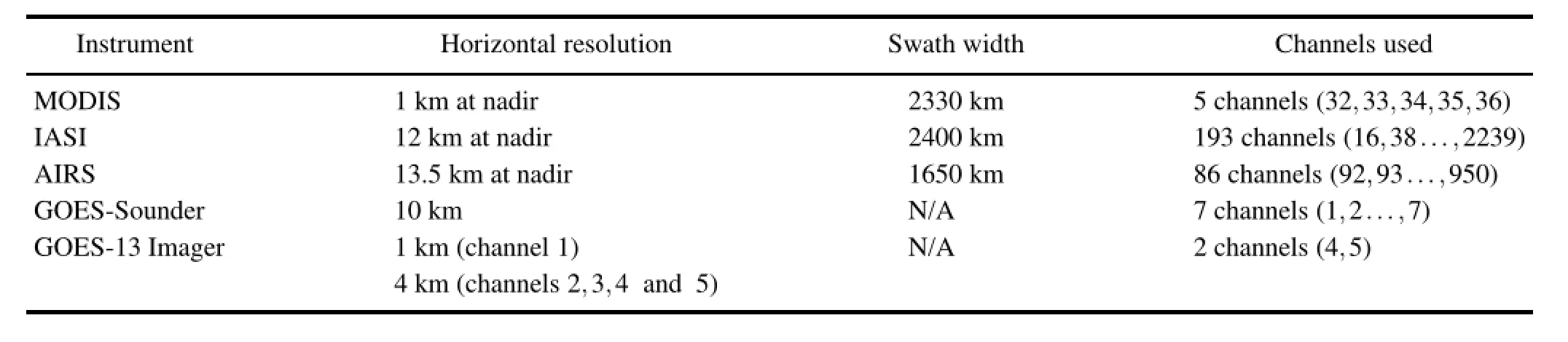
Table 1.Instrument parameters.
IASI is a high-spectral-resolution infrared sounder onboard the Meteorological Operation(MetOp)series of European meteorological polar-orbiting satellites(Blumstein et al.,2004).It measures the radiances emitted from Earth in 8461channels,coveringthe spectral interval645–2760cm-1(wavelength from 3.62µm to 15.5µm)at a spectral resolution of 0.5 cm-1(apodized).There are 30 viewing positions on the measurement track,spaced by approximately 3.3 degrees,symmetrical to the nadir.In this study,we use a subset of 616 channels,which were pre-selected by the National Centers for Environmental Prediction(NCEP)from all 8461 channels in MetOp-A IASI radiances.
AIRS,onboard Aqua(Aumann et al.,2003),has similar spectral and spatial coverage and resolution to IASI.However,it is a grating spectrometer rather than an interferometer with 90 ground footprints along its cross track.It measures Earth’s outgoing radiation at 0.4 to 1.0µm and 3.7 to 15.4 µm.For the purpose of this study,we constructed a subset of 281 channels(pre-selected by NCEP)out of all 2378 channels.
Although at a lower spectral resolution,geostationary instruments provide near continuous observations over the observation domain.GOES is part of NOAA’s Geostationary OperationalEnvironmentalSatellite system(MenzelandPurdom,1994).The GOES Sounder has 18 thermal infrared bands,plus a low-resolution visible band(19-channel),ranging in wavelength from 3.74µm to 14.71µm.Its feld of view is 8 km and is sampled every 10 km.In this study,we use GOES-13 Sounder(east)and GOES-15 Sounder(west) to obtain cloud fractions over the continental United States domain.
The GOES-13 Imager used in this study is a fve-channel (one visible,four infrared)imaging radiometer designed to sense radiant and solar refected energy.The central wavelengths for channels 1–5 are 0.62,3.9,6.5,10.6,and 13.3 µm,respectively.
3.2.Background and radiative transfer models
The Weather Research and Forecasting(WRF)model (Skamarock et al.,2008)was used in this study as the host model.The cloud retrieval,observation preprocessing,and quality control procedures were essentially incorporated into the framework of WRF data assimilation(WRFDA)system (Barker et al.,2012),when modelingthe cloud fractions.The Community Radiative Transfer Model(CRTM)(Han et al., 2006;Liu andWeng,2006)and the RTM for NOAA’s TIROS (Television Infrared Observation Satellite)Operational Vertical Sounder(RTTOV)(Eyre,1991;Saunders et al.,1999) were used as the radiance forwardoperatorfor computingthe clear-sky radiance and the radiance given overcast clouds at each model level.
3.3.Experiment design
A regional domain over continental United States was used with various cloud types.The domain for experiments had a 15 km grid spacing on a 415×325 horizontal grid in longitude and latitude respectively and 40 vertical levels with the model top at 50 hPa.The MMR scheme searched the cloud top using approximately 130 hPa as the highest extent in this study.Channels in the longwave CO2band were used in the MMR algorithm,as the CRTM can provide a satisfactorysimulationofthetemperature-sensitivechannelswiththe background from the WRF model(Xu et al.,2013).
This paper presents cloud retrieval experiments for 24 independent hours from 0000 UTC to 2300 UTC 3 June 2012 from various satellite sensors.Figures 1b and c show the gap distance between two neighboring pixels as a function of scan positions with different felds of view for AIRS and IASI.The indices 45 and 30 stand for the nadir points for AIRS and IASI respectively.For each satellite pixel,the cloud fractions were extrapolated to the four vicinal model grid points.Gaps between two pixels along the measurement lineforAIRS andIASIarerelativelylarge,especiallyforpixels with large scan angles(Fig.1).For example,for pixels on the edge(with large felds of view),the gap is more than 35 km.Thus,we conducted extrapolations(gap flling)for the cloud fractions representative for one pixel with an adaptive radius corresponding to the scan angles.The adaptive radius for each pixel was consistent with the actual distance betweenits two neighboringpixelsalongthe scan track(from nadir to swath edge).It was found that cloud retrievals using the extrapolation scheme with scan angle-dependent radius were better than those without extrapolations or with extrapolations using a fxed radius for pixels off-nadir,with errors wellbelowformaluncertainty.TheMMRalgorithmretrieved cloud fractions on each pixel for each sensor independently and sequentially.For example,the MMR scheme processed radiances from EOS-aqua after retrieving clouds with radi-ances from EOS-terra(AM).For the overlapping region,the cloud fractions from EOS-aqua(PM)would overwrite those from EOS-terra.A similar extrapolation was conducted for AIRS,but only for the frst four pixels close to the edges of the scan line.Sensitivity experiments,similar to the above experiments but using RTTOV,were conducted to evaluate the robustness of the MMR scheme in terms of using different RTMs.
4. Cloud retrievals
In this section,to compare the cloud mask retrieved from different sensors for all the tested hours,a large and uniformcoverageof cloud mask was required.In this study,we chose the GOES imageras a referenceto validate the MMR method for the continental United States domain.In addition,the MMR-retrieved cloud products were compared to existing cloudproductsfromindependentplatforms,suchasCloudSat (Stephens et al.,2002)and EOS-Aqua(MODIS)(Platnick et al.,2003)to verify the retrievals from the MMR scheme. Although these references are not the“truth”,they serve as guidelines to see how much agreement there is among retrievals from different radiance observations.Validations and comparisons were conducted on the model grid for future NWP applications.We present the equitable threat scores (ETS)and bias scores for both the retrieved cloud mask and cloud top pressures,which are defned as follows(Schaefer, 1990):
with
and
whereNtis the number of samples for verifcation,Nhis the number of samples of both the reference and MMR retrievalsmeetingorexceedingthethreshold,Nmis thenumberofsamples ofthe referenceonlymeetingorexceedingthe threshold,Nfis the number of samples of the MMR retrieval only meeting or exceeding the threshold.ETS scores range from-1/3 to 1,where 0 indicates no skill and 1 is a perfect score.Bias scores indicate whether the retrieval system has a tendencyto underestimate(BIAS<1)or overestimate(BIAS>1)events.
4.1.Cloud mask
We defne the MMR-retrieved cloud mask as the integrated cloud fractions on each model level over the whole column(bysummingc1+c2+...+cn)foreachpixel.Figure 2 shows the cloud masks obtained from fve sensors(AIRS, MODIS,IASI,GOES-Sounder,and GOES-Imager)at 1900 UTC with the MMR scheme,and the cloud mask products from GOES 13 and GOES 15.Generally,the cloud masks from all the sensors matched well with the cloud mask from the GOES retrieval.We found good spatial agreement within a single instrument,although the cloud fraction on each pixel was estimated independently.The total cloud fractions from AIRS were slightly larger than those from MODIS(e.g.,the areas in the vicinity of the black circle in Figs.2b and e),indicating that there was relatively larger contrast between the clear-sky radiances and observed radiances from AIRS than that from MODIS.The combination of the cloud mask from EOS-aqua and EOS-terra(Fig.2e)showed close agreement with the reference in Fig.2a.We did not see any obvious gap or discontinuity where radiances from the two sensors overlapped.The cloud mask from IASI radiances agreed well with the imagery,albeit with some discontinuities due to the relatively low spatial resolution at the edge(e.g.,the areas in the vicinity of the black circle in Fig.2d).The cloud mask with the GOES-Imagermatched the referencevery well,providing a near full coverage(Fig.2f).With higher spatial resolutions,fewer gaps of the cloud fractionfelds of the GOESImager and MODIS were flled compared to those from IASI radiances.The cloud fractions from the GOES-Sounderwere also comparable to those from other sensors.
Figure 3 shows theNh,NfandNmlocations for the fve sensors at 1900 UTC with GOES retrieval products as reference.We masked the reference feld as cloudy when there was a record of a cloud mask in the GOES retrieval products, and we masked the MMR retrieved output as cloudy when the total cloud fractions of one column was larger than zero. Both the reference felds and MMR-retrieved felds were interpolated to the same 0.1°×0.1°grid with a binary mask (0 for clear and 1 for cloudy),before we conducted the comparison for verifcation.Note that the MMR cloud mask retrieval hit the GOES retrieval products for most of the cases for these sensors.MMR slightly underestimated the cloud mask from IASI and MODIS,while the MMR scheme produced better cloud mask retrievals from the GOES-Imager, GOES-Sounder,and AIRS.There is a large area off the coast of California with missing clouds in Figs.3c and d.We found that these were low-level clouds(~950 hPa),which frequentlyoccur in this area(not shown),indicating that very low clouds are poorly detected by the MMR scheme.
Figure 4 shows the ETS and bias scores based on the results from 0000 UTC to 2300 UTC.The MMR scheme yielded the highest scores with the GOES-Imager data,but overestimated the cloud mask with the largest bias scores. The MMR scheme also produced high ETS scores with the GOES-Sounder data,with overall least bias.The MMR scheme provided better consistency between the cloud mask with the reference data with AIRS than with MODIS and IASI.Consistent with Fig.3,the MMR scheme underestimated the cloud mask with MODIS and IASI.
4.2.Cloud top pressure
The scatter plots of the MMR-retrieved cloud top pressures from AIRS and MODIS radiances against the MODIS MYD06 cloud top pressures(http://modis-atmos.gsfc.nasa. gov/MOD06 L2/)are illustrated in Fig.5.Three sub-periods of the MYD06 cloud retrieval products were chosen to approximate the validation time(0800 UTC in Figs.5a and b; 0900 UTC in Figs.5c and d;and 1100 UTC in Figs.5e and f).Results from other examples during daytime hours were similar(not shown).The MMR scheme seems robust in retrievingthecloudtop pressuresfromAIRS and MODIS,with correlation greater than 0.7 for most cases.Using AIRS data, thestatistics showedmuchbetteragreementwiththe MYD06 cloud retrieval products,with high correlations of greater than 0.8.An overestimation of cloud height from MODIS was observed,especially for 0800 UTC and 0900 UTC.In Figs.5b and d,there are two groups of horizontally aligned points.This is because the MMR scheme searches the cloud top using approximately 130 hPa as the highest extent.The cloud top pressures for those extremely high clouds were all marked as approximately 130 hPa.These results on cloud top pressures are not surprising,because the accuracy in retrievingcloud top pressures and cloud profles decreases with fewer channels from observations.For MODIS data,the less informationintheobservationsofretrievingthecloudprofle, the more the under-determinedthe problem becomes.
Figure 6 presents the ETS scores of the cloud top pressure from 0000 UTC to 2300 UTC for the thresholds of 300,500,700,850,and 950 hPa.The reference cloud top pressure felds from GOES retrievals and the MMR cloud top pressure outputs were both interpolated to the same model grid.When the model-retrievedand reference cloud top pressures were both lower than the given threshold,we defned a hit event.When only the model-retrieved cloud top pressures were lower than the given threshold,we defned a false alarm event.A miss event happened when the modelretrieved cloud top pressure was higher than the threshold, while the reference cloud pressure was lower than the threshold.Overall,mid-level clouds(700 and 850 hPa)were better detected than higher clouds(300 and 500 hPa),indicating that for highclouds(existingas ice-clouds),the hypothesisof an effective emissivity(i.e.,the cloud emissivity multiplied by the cloud fraction)is inaccurate.Low clouds(e.g.,950 hPa)were poorly detected by most sensors,which is consistent with the theoretical demonstration of Aulign´e(2014a)in which the low clouds are less representedin the set of leading eigenvectors of the cloud fraction analysis error.The MMR scheme obtained the highest scores for most of the thresholds fromAIRS and IASI.It showedbetter agreementusingAIRS in detecting the cloud height than using MODIS with the GOES reference retrieval.It was also noticeable that the ETS scores for the GOES-Imager were better than or comparable with those from MODIS.Even with fewer channels from observations,the MMR solution was an“overly smoothed”estimation of the true vertical profle,starting from a uniform clear prior guess.
4.3.Cloud fraction profle
The cloud fractions from AIRS and MODIS were compared to CloudSat data.CloudSat is an experimental satellite that uses radar to observe clouds and precipitation from space.CloudSatprovidedthe frst globalsurveyof cloudprofles and cloud physical properties and measures the vertical structure of clouds and precipitation from space primarily through 94 GHz radar refectivity measurements.An orbit of CloudSat consists of approximately 39 400 profles.
Figure 7 shows the standard radar refectivity profles from the“2B-GEOPROF”products(Mace,2004)and cloud fraction cross sections along the CloudSat orbit tracks for 0800 UTC,0900 UTC,and 1100 UTC.The cloud distributions and thickness from AIRS and MODIS were in good agreement with the radar refectivity for the cross sections. ThecloudfractionsfromAIRSwereslightlylargerthanthose from MODIS at 0900 UTC,which can also be seen in Fig. 2.Cloud fractions from AIRS were much closer to the reference than those from MODIS in terms of obtaining the cloud height,because the MMR scheme overestimated the cloud top height from MODIS for most cases(Figs.7c,f, and i).This is consistent with the results of Li et al.(2005), when using MODIS and AIRS in a one-dimensional variational retrieval method.With rather high spatial resolution, the cloudmask fromthe MMR scheme from MODIS showed betteragreementwiththereference.TheMMRschemefailed to identify some clear scenes between two clouds for some cases from AIRS(e.g.,the clear scenes in the black circles in Figs.7d–f).The correlation coeffcients between the Cloud-Sat products and the MMR cloud retrievals and the ETSs are also given in Table 2.Model retrievals were interpolated to the reference felds.We marked the felds with 0 for clear and 1 for cloudy before conducting the statistical comparison.Since a very small drift of clouds patterns or height in the MMR outputs away from what CloudSat observed could cause large bias in the statistics,the correlations between the cloud patterns from CloudSat and those from the MMR outputs were not low,relatively.Nevertheless,the MMR scheme has shown some meaningful skill in detecting cloud profles. Generally,the accuracy of the MMR scheme in detecting mid-level clouds(e.g.,3 and 5.5 km)was found to be higher than detecting higher or lower clouds(9 and 2.5 km respectively).The cloudprofles fromthe MMR scheme with AIRS radiances agreed better with the CloudSat cloud profles in most cases.
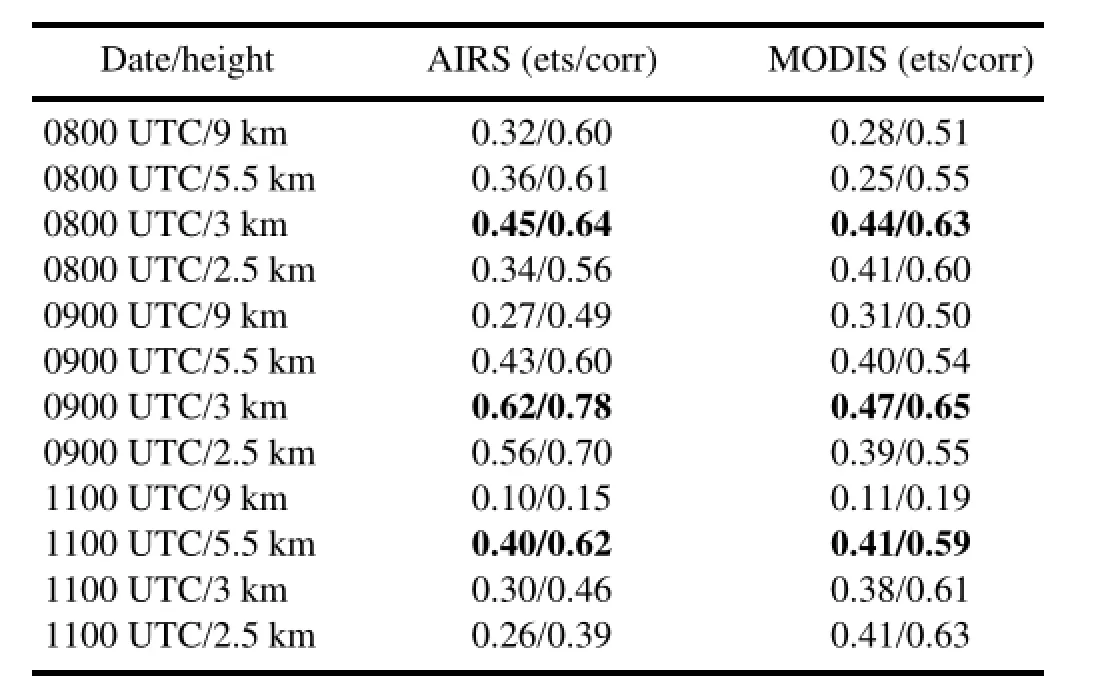
Table 2.Correlation coeffcient(corr)between the cloud patterns fromCloudSatand theMMR outputs,andtheequitablethreat scores (ets)for four selected levels.The numbers in bold mean the highest scores among the four levels.
5. The cloudy radiance operator
Evidenceshowsthatcloudindicatestheoccurrenceofdynamicallyimportantweather.Thus,areasknowntobeimportant in the development of forecast errors in NWP are often cloudy(McNally and Watts,2003).The adoption of cloudy radiancecan allow for a much better use of available data and avoid discarding potentially helpful information.Equation (1)can be used as a cloudy radiance operator with the cloud fractions to be derived.The resulting cloudy radiancesRνcare simulated by linearly combing the clear-sky calculated radianceRνrand the array of radianceRνkcalculated assuming the existence of an overcast black cloud at the model levelkby the RTM.As a linear operator,the MMR scheme is relatively inexpensive and less dependent on background hydrometeors.
5.1.Simulated cloudy brightness temperature
Figure 8 shows the observed and CRTM-calculated brightness temperature(Tb)for channel 267(wavelength: around 13.774µm)over land without(Rνr)and with(Rνc) the MMR scheme for AIRS and MODIS.Clouds are usually colder than the surface(land or water)with a radiative impact,which is usually negative.There were signifcant warm biases in the CRTM-calculated Tbs without the MMR scheme versus observations(Figs.8a and c).By simulating the cloud fractions,the MMR scheme corrected the warm bias(simulatedTbminus observedTb)accordingly,with reduced mean,standard deviation,and root-mean-square error.Indeed,warmer observations(compared to background brightness temperature)existed for pixels over land(withTbvalues larger than 270 K in Figs.8a and c,marked by the blackcircle),likelycorrespondingto clear radianceswith improper skin temperature or surface emissivity.In those situations,MMR did not change the simulatedTbfor these pixels (Figs.8b and d),indicating that there was no misinterpretation for an error in skin temperature or surface emissivity. Results from other channels produced similar patterns(not shown).
Figure 9a presents the observed minus background radiance departure for IASI for all observations(flled symbols), and clear observations(open symbols)at 0300 UTC 3 June 2012.It can be seen that,for channelssensitive to levels from the lower stratosphere down to the middle troposphere(approximately channel 16 to 300),these departures were very similar.These departurescalculated forall observationswere slightlylargerthanthoseforclearobservations,especiallyfor temperaturechannelssensitivetolowerlevels(channel300to 420).In overcast conditions,sources of large variance,such as surface skin temperature and low-level humidity,were essentially obscured.Departures using the MMR cloudy observation operator have been found to be comparable to the departures under overcast conditions(e.g.,McNally,2009, Fig.3).Figure 9b presents histograms of observed minus background radiance departure for IASI based on the data in Fig.9a for all observations and clear observations.We can see that,for both populations with all and clear observations, the departures are quite symmetrical.The MMR scheme collected twice the amount of observations for all observations than for clear observations.Consistent with Fig.9a,the MMR scheme collected more data with cold departures for the“all observations”population than for the“clear observations”population.Hence,theMMR schemeseems to possess the capability to reproduce the cloud radiance effect for IASI radiance as a fast and linear observation operator.
5.2.Sensitivity to RTMs
As the MMR algorithm works by comparing the RTM-calculated radiance with observations,it is interesting to examine the robustness of the MMR algorithm with respect to different RTMs(e.g.,CRTM and RTTOV).We conducted sensitivity experiments using RTTOV and CRTM for AIRS and MODIS.Figure 10 shows observation minus simulated radiancedepartureswithandwithouttheMMR schemebased on 25 553 and 102 321 pixels for AIRS and MODIS,respectively,to examine the capability of the scheme in ftting the observations.For AIRS,there were consistently larger differences between the clear-sky and measured radiance(without the MMR scheme)from RTTOV,compared to the differences from CRTM,especially in longwave channels(channel 15–950)(Figs.10a and b).For MODIS,RTTOV showed a slightly smaller value of departure compared to CRTM for the channels in use(channel 32–36)without the MMR scheme.As expected,we obtained slightly larger magnitudes of cloud fractions for AIRS and smaller magnitudes of cloud fractions for MODIS from RTTOV(not shown).Comparable means and standard deviations of the departures with the MMR scheme were observed using both CRTM and RTTOV.
Using both CRTM and RTTOV,the MMR scheme successfully removed large differences between the calculated and observed radiances by the calculation of the cloud fractions variationally,with a bias close to zero for most of the channels and a reduced standard deviation(from~10 K to~2 K).For AIRS,although the MMR algorithm was applied to individual longwave channels(from approximately channel 15 to channel 950),large reductions of bias for other channels were also noticeable.Large differences were seen for O3-sensitive channels around 9.6µm(channel number~1000)and shortwave channels(channel number>2000). This is because no O3profles were used in the RTMs in the above calculations,and shortwave channels are usually contaminated by solar spectra during daytime hours.
Similarly,reductionsforboththemeanandstandarddeviation of innovationswith the MMR scheme for MODIS were also obvious,especially for the channels used in the MMR procedure(channel 32–36)(Figs.10c and d).As discussed above,the contrast between the clear-sky and observed radiance determines the magnitude of the retrieved cloud fractions.As expected,departures from AIRS were larger,with absolute values close to 9 K for most of the channels in use (channel 15–950),than those from MODIS,with absolute values less than 9 K from channel 32 to 36.This is consistent with the results presented in section 4,in which the MMR scheme yielded slightly larger values of cloud fraction using AIRS than MODIS.
6. Summary and future work
The MMR cloud retrieval algorithm aims to retrieve both cloud masks and multi-layer clouds for each feld-of-view on any grid network with a host model with the aid of an RTM. It is fast and easy to run,since only two inputs are required (observed radiances and the backgroundfeld).Through synergistic use of multiple satellite radiances with infrared channels available,it is possible to retrieve real-time cloud products for both regional and global domains,which are of high potential value for NWP and other applications.
In this study,radiances from multiple satellites onboard both geostationary and polar-orbiting satellites were used to validate the MMR scheme developed within the WRFDAsystem.To assess the reliability of this algorithm,intercomparisons of cloud retrievals using the MMR scheme from different sensors were carried out.The MMR cloud retrievals were also compared to other independent cloud products from CloudSat,MODIS,and GOES.
The MMR scheme proved to be robust in retrieving the quantitative cloud mask.Good spatial agreement within a single instrument was found,although the cloud fraction on each pixel was estimated independently.The retrieved cloud propertiesshowedgoodagreementusingradiancesfrommultiple satellites,especially for the vertically integrated cloud mask,for all the sensors used in this study.The algorithm produced realistic cloud top pressures when compared to other cloud products,with an accuracy varying with the sensors’spectral resolutions.The accuracy of the MMR scheme in detecting mid-level clouds was found to be higher than for higher and lower clouds.The accuracy in retrieving cloud toppressuresandcloudproflesincreasedwithmorechannels from observations.Even with fewer channels from observations,the MMR solution was an“overly smoothed”estimation of the true vertical profle,starting from a uniform clear prior guess.Hence,the MMR could be used as a useful tool when diagnosing cloud locations.The cloud locations from the MMR scheme could be converted to improve the model frst guess in cloud microphysicalparameters,e.g.,using the (semi-)empirical method of Hu et al.(2006).
The retrieval algorithm also showed some meaningful skills in simulating the cloudy radiance as a linear observation operator,discriminating between NWP error and cloud, and reproducing the cloud radiance effect for radiance observations.This linear observation operator is attractive for its high computational effciency and advantage in simulating multi-layer clouds over other,single-layer only,studies (e.g.,Pavelin et al.,2008;McNally,2009).The retrieval scheme was also foundto be robust based on differentRTMS (CRTM and RTTOV).The potential for using the MMR operator to assimilate cloudy radiances to improve temperature and moisture felds in cloudy regions(e.g.,Pavelin et al., 2008;McNally,2009),but with multi-layer clouds,will be of great interest to most NWP centers.
Apart from the validation of the MMR scheme for multiple radiances in this study,synergistic use of radiances from multiple sensors is also an important aspect,which will be further investigated in the future.For example,the MMR scheme could be improved by enhancing the horizontal interpolation approaches for AIRS and IASI based on the prior cloud mask from other sensors and/or by adding the cloud fraction background constraint in the MMR minimization procedure.Nowcasting of the 3D cloud fractions via the WRF model in a rapid-update cycling mode is also planned, to improve the short-term forecasting of clouds.The infuence of cloudy affected radiances on analyses performed using the MMR cloudy radiance operator is another interesting aspect for future work.Finally,the use of cloud liquid water and ice mixing ratios retrieved from the MMR cloud fractions using multiple radiance resources to pre-processthe frst guess will bediscussedanddetailedin a follow-uppaper.
Acknowledgements.This work was jointly sponsored by the 973 Program(Grant No.2013CB430102),the Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD),and the Air Force Weather Agency.The authors would like tothank Hui-Chuan LIN and Feng GAO for fruitful discussions, and to Bobbie WEAVER for editing the manuscript.The help and support from Craig S.SCHWARTZ,Allegrino Americo SAMUEL, and Gael DESCOMBES are greatly appreciated.The National Center for Atmospheric Research is sponsored by the National Science Foundation.Any opinions,fndings,and conclusions or recommendations expressed in this publication are those of the authors and do not necessarily refect the views of the National Science Foundation.
REFERENCES
Aulign´e,T.,2007:Variational assimilation of infrared hyperspectral sounders data:Bias correction and cloud detection.Ph. D.thesis,University Paul Sabatier,222 pp.
Aulign´e,T.,A.Lorenc,Y.Michel,T.Montmerle,A.Jones,M. Hu,and J.Dudhia,2011:Toward a new cloud analysis and prediction system.Bull.Amer.Meteor.Soc.,92,207–210.
Aulign´e,T.,2014a:Multivariate minimum residual method for cloud retrieval.part I:Theoretical aspects and simulated observation experiments.Mon.Wea.Rev.,doi:http://dx.doi.org/ 10.1175/MWR-D-13-00172.1.
Aulign´e,T.,2014b: Multivariate minimum residual method for cloud retrieval.Part II:Real observations experiments.Mon.Wea.Rev.,doi:http://dx.doi.org/10.1175/MWR-D-13-00173.1,in press.
Aumann,H.H.,and Coauthors,2003:AIRS/AMSU/HSB on the Aqua mission:Design,science objectives,data products,and processing systems.IE Trans.Geosci.Remote Sens.,41, 253–264.
Barker,D.M.,and Coauthors,2012:The Weather Research and Forecasting(WRF)model’s community variational/ensemble data assimilation system:WRFDA.Bull.Amer.Meteor.Soc., 93,831–843.
Bayler,G.M.,R.M.Aune,and W.H.Raymond,2000:NWP cloud initialization using GOES sounder data and improved modeling of nonprecipitating clouds.Mon.Wea.Rev.,128, 3911–3920.
Blumstein,D.,and Coauthors,2004:IASI instrument:Technical overview and measured performances.Proc.SPIE,5543, 196–207.
Chahine,M.T.,1975:An analytical transformation for remote sensing of Clear-Column atmospheric temperature profles.J. Atmos.Sci.,32,1946–1952.
Evan,A.T.,A.K.Heidinger,and D.J.Vimont,2007:Arguments against a physical long-term trend in global ISCCP cloud amounts.Geophys.Res.Lett.,34(4),doi:10.1029/2006 GL028083.
Eyre,J.R.,1991:A fast radiative transfer model for satellite sounding systems.ECMWF Research Dept.Tech.Memo., No.176,ECMWF,28 pp.
Eyre,J.R.,W.P.,Menzel,1989:Retrieval of cloud parameters from satellite sounder data:A simulation study.J.Appl.Meteor.,28,267–275.
Gilbert,J.C.,and C.Lemar´echal,1989:Some numerical experiments with variable-storage quasi-Newton algorithms.Math-ematical Programming,45,407–435.
Goldberg,M.,Y.Qu,L.McMillin,W.Wolf,L.Zhou,and M. Divakarla,2003:AIRS Near-Real-Time products and algorithmsinsupport of operational numerical weather prediction.IE Trans.Geosci.Remote Sens.,41,379–389.
Han,Y.,P.V.Delst,Q.Liu,F.Weng,B.Yan,R.Treadon,and J. Derber,2006:JCSDA Community Radiative Transfer Model (CRTM)—Version 1.NOAA Tech.Rep.NESDIS,No.122, 33 pp.
Hu,M.,M.Xue,and K.Brewster,2006:3DVAR and cloud analysis with WSR-88D Level-II data for the prediction of the fort worth,Texas,Tornadic thunderstorms.Part I:Cloud analysis and its impact.Mon.Wea.Rev.,134,675–698.
Huang,H.L.,W.L.Smith,J.Li,P.Antonelli,X.Q.Wu,R.O. Knuteson,B.Huang,and B.J.Osborne,2004:Minimum local emissivity variance retrieval of cloud altitude and effective spectral emissivity—Simulation and initial verifcation.J.Appl.Meteor.,43,795–809.
Liu,Q.,and F.Weng,2006:Advanced doubling-adding method for radiative transfer in planetary atmosphere.J.Atmos.Sci., 63,3459–3465.
Li,J.,andCoauthors,2005:Retrieval of cloudmicrophysical properties from MODIS and AIRS.J.Appl.Meteor.,44,1526–1543.
Li,Z.,M.C.Cribb,F.L.Chang,and A.P.Trishchenko,2004: Validation of MODIS-retrieved cloud fractions using whole sky imager measurements at the three ARM sites.Proceedings of the14th Atmospheric Radiation Measurement(ARM)Science Team Meeting,Albuquerque,New Mexico,22–26.
Mace,G.G.,2004:Level 2 GEOPROF product process description and interface control document(v.3).Tech.Rep.,CIRA, Colorado State University,43 pp.
McNally,A.P.,2009:The direct assimilation of cloud-affected satellite infrared radiances in the ECMWF 4D-Var.Quart.J. Roy.Meteor.Soc.,135(642),1214–1229.
McNally,A.P.,and P.D.Watts,2003:A cloud detection algorithm for high-spectral-resolution infrared sounders.Quart.J.Roy. Meteor.Soc.,129,3411–3423.
Menzel,W.P.,and J.F.W.Purdom,1994:Introducing GOES-I: The frst of a new generation of geostationary operational environmental satellites.Bull.Amer.Meteor.Soc.,75,757–781.
Menzel,W.P.,W.L.Smith,and T.R.Stewart,1983:Improved cloud motion wind vector and altitude assignment using VAS.J.Climate Appl.Meteor.,22(3),377–384.
Pavelin,E.G.,S.J.English,and J.R.Eyre,2008:The assimilation of cloud-affected infrared satellite radiances for numerical weather prediction.Quart.J.Roy.Meteor.Soc.,134(632), 737–749.
Platnick,S.,M.D.King,S.A.Ackerman,W.P.Menzel,B.A. Baum,J.C.Ri´edi,and R.A.Frey,2003:The MODIS cloud products:Algorithms and examples from Terra.IE Trans. Geosci.Remote Sens.,41(2),459–473.
Rossow,W.B.,and R.A.Schiffer,1991:ISCCP cloud data products.Bull.Amer.Meteor.Soc.,72(1),2–20.
Rossow,W.B.,A.W.Walker,and L.C.Garder,1993:Comparison of ISCCP and other cloud amounts.J.Climate,6(12), 2394–2418.
Saunders,R.,M.Matricardi,and P.Brunel,1999:An improved fast radiative transfer model for assimilation of satellite radiance observations.Quart.J.Roy.Meteor.Soc.,125,1407–1425.
Schaefer,J.T.,1990:The critical success index as an indicator of warning skill.Wea.Forecasting,5,570–575.
Smith,W.L.,and R.Frey,1990:On cloud altitude determinations from high resolution interferometer sounder(HIS)observations.J.Appl.Meteor.,29,658–662.
Smith,W.L.,H.M.Woolf,P.G.Abel,C.M.Hayden,M.Chalfant, and N.Grodt,1974:Nimbus-5 sounder data processing system.Part 1:Measurement characteristics and data reduction procedures,NOAA Tech.Memo.NESS 57,99 pp.
Skamarock,W.C.,and Coauthors,2008:A description of the Advanced Research WRF version 3.NCAR Tech Note, NCAR/TN–475+STR,Boulder,113 pp.
Stephens,G.L.,and Coauthors,2002:The CloudSat mission and the A-Train:A new dimension of space-based observations of clouds and precipitation.Bull.Amer.Meteor.Soc.,83(12), 1771–1790.
Wu,X.,and W.L.Smith,1992:Assimilation of ERBE data with a nonlinear programming technique to improve cloud-cover diagnostics.Mon.Wea.Rev.,120,2009–2024.
Xu,D.,Z.Liu,X.-Y.Huang,J.Min,and H.Wang,2013:Impact of assimilating IASI radiance observations on forecasts of two tropical cyclones.Meteorology and Atmospheric Physics, 122,1–18.
:Xu,D.M.,T.Aulign´e,and X.-Y.Huang,2015:A validation of the Multivariate and Minimum Residual method for cloud retrieval using radiance from multiple satellites.Adv.Atmos.Sci.,32(3),349–362,
10.1007/s00376-014-3258-5.
(Received 25 December 2013;revised 15 June 2014;accepted 27 June 2014)
∗Corresponding author:Xiang-Yu HUANG
Email:huangx@ucar.edu
杂志排行
Advances in Atmospheric Sciences的其它文章
- Data Selection Using Support Vector Regression
- Assessment of the Biospheric Contribution to Surface Atmospheric CO2Concentrations over East Asia with a Regional Chemical Transport Model
- The Impact of AIRS Atmospheric Temperature and Moisture Profles on Hurricane Forecasts:Ike(2008)and Irene(2011)
- Connections between the Eurasian Teleconnection and Concurrent Variation of Upper-level Jets over East Asia
- Role of the 10–20-Day Oscillation in Sustained Rainstorms over Hainan, China in October 2010
- Retrieval of Outgoing Longwave Radiation from COMS Narrowband Infrared Imagery