一类基于事件驱动的网络化H∞滤波器设计
2015-02-23蒋昌龙刘明
蒋昌龙,刘明
(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)
一类基于事件驱动的网络化H∞滤波器设计
蒋昌龙,刘明*
(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)
研究了一类线性连续系统网络化H∞滤波问题。提出了一种基于事件驱动的网络传输机制,可以有效地降低数据的网络传输负担。采用输入-时滞技术,构建了增广的滤波误差时滞系统。针对增广的滤波误差时滞系统,采用Lyapunov-Krasovskii泛函方法,以线性矩阵不等式(LMI)的形式给出了其稳定性及H∞性能指标存在充分条件,而后给出了H∞滤波器设计方法。仿真算例有效地验证了基于事件驱动的网络化H∞滤波器的有效性和优越性。
H∞滤波;线性连续系统;网络传输;事件驱动
近年来,H∞滤波得到了广泛的关注和研究。相对于传统的Kalman滤波,H∞滤波不需要其外部输入噪声必须是高斯白噪声,因此,更加符合实际情况[1]。随着网络化技术的快速发展,网络化控制系统也受到越来越多的关注。相对于传统系统,网络化系统具有传输距离远、维修成本低、可拓展性强等优点,广泛应用在工业、军事、医疗、社会生活等各个领域[2]。将网络化技术及H∞滤波相结合,是目前一个非常热门的研究方向。
当前基于网络化传输的H∞滤波主要分析网络在不同采样机制下以及通信受限情况下的滤波器设计方法[3]。文献[4-5]研究了具有不确定采样特性的网络化H∞滤波问题。文献[6-7]研究了具有数据丢包以及量化误差下系统的H∞滤波问题。文献[8]研究了具有随机传输时滞和数据丢包的网络化系统滤波其设计问题。需要注意的是,文中所提到的基于网络化系统滤波研究结果前提都是假设系统的采样和数据传输是同步的。在工程实践中,有些采样数据和上一时刻无明显变化,然而在上述文献中同样要进行传输。这样势必会增加网络的负担,造成一定的网络堵塞。如何确定一种新的方案,使得短时间内数值变化较明显的采样数据进行传输,丢弃变化不大的数据,最大程度上降低数据传输密度,是一个意义重大同时又具有挑战性的问题。
基于事件驱动数据传输机制可以有效地解决上述问题。该方法对数据进行定周期采样,但只有连续两次采样数据变化较大且满足某个事件阈值时,数据传输系统才会被驱动,否则该采样数据将会被丢弃[9-10]。这样可以在保证系统动态性能的前提下,有效地减少一些变化不大的数据的传输,降低网络负担。文中基于该思想,将事件驱动机制引入到网络化滤波器设计过程,建立新的滤波器设计方案。提出的方法从网络资源耗损和稳定性的角度可望获得更优的滤波器设计效果。
1 问题描述及预备知识
考虑一类连续线性系统如下

针对上述系统,文中将在网络传输环境下设计一类全阶的线性定常滤波器系统。首先对输出值y(t)进行定周期采样,采样周期为h,采样值表示为y(jh),j∈N。这些所得的定周期采样数据经事件驱动模块后只有采样值y(bih),i∈N,bi∈N进入网络进行传输,所传输的数据经零阶保持器(ZOH)进入到滤波系统进行滤波。系统模型如图1所示。
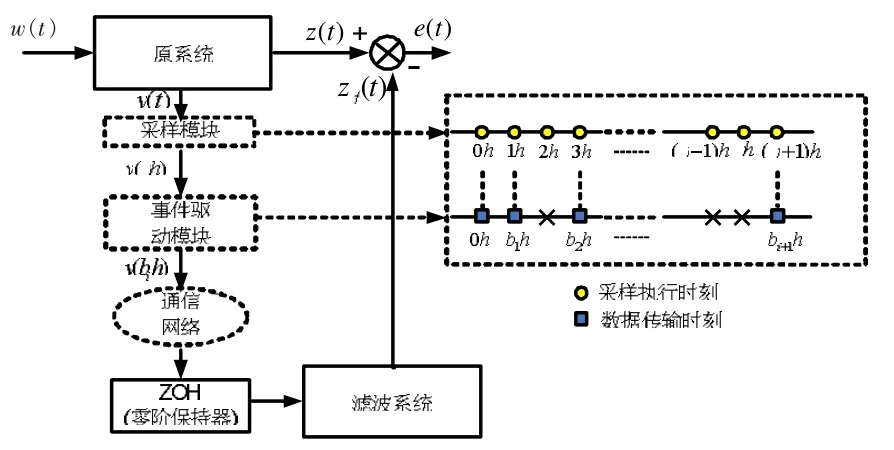
图1 基于网络传输的事件驱动滤波模型
由图1可见,对输出y(t)的采样是定周期的。但跟常规的网络化控制系统采样完成后立刻进行数据传输不同,该系统在完成采样后并没有立即执行数据传输,而是只有当采样值达到某个事件驱动条件以后,数据才会被经过网络以及ZOH传输到滤波器。否则,该采样数据将被丢弃,而滤波器系统依然保持上一次收到的数据值。这样可以有效地降低数据传输密度,避免网络堵塞,最大程度节省网络资源。
文中设计的基于网络传输的全阶线性定常滤波器如下

其中Af∈Rnx×nx,Bf∈Rnx×ny,Cf∈Rnx×nz和Df∈Rnz×ny为待求取的全阶滤波器参数矩阵。y(bih)表示滤波系统最后一次(第i次)收到的采样数据。事件驱动的定义如下:
给定一个正定对称矩阵Φ>0,一个常数δ∈[0,1),则每一次数据传输的时刻定义为

其中ek(lh)=y((bi+l)h)-y(bih),l∈N。
采用输入时滞的方法,对于任何一个t∈[bih,bi+1h)∩[jh,(j+1)h),可得

其中,d(t)=t-y(jh),bih≤jh<bi+1h,j∈N。
对上述系统(1)以及滤波器系统(2)进行增广,可得到如下的滤波误差增广系统

文中将H∞滤波器设计的问题归结为:(1)当w(t)=0,滤波误差系统(3)是渐进稳定的;(2)给定γ>0,在零初始条件下,对于任意的非零噪声w(t)∈L2[0,∞),都满足H∞性能指标关系。
2 事件驱动H∞滤波
首先,对滤波误差系统(3)的H∞性能进行分析,存在以下定理。
定理1对于给定的γ>0,如果存在对称正定矩阵P>0,Q>0,Z>0,以及具有合适维数的矩阵N,使得矩阵不等式ε≺0成立,其中


成立,则滤波误差系统(3)是渐进稳定的,且满足H∞性能指标γ。
证明考虑如下的Lyapunov-Krasovskii泛函

其中

基于上述的Lyapunov-Krasovskii泛函定义(5),可知,如果能证明

则对于非零噪声w(t)∈L2[0,∞),滤波误差系统在w(t)=0是渐进稳定的,且满足H∞性能指标γ。对沿着滤波误差系统对时间求导可得

引入以下变量

进一步可得

此外根据事件驱动的定义有

可得

进而利用Schur补引理和不等式ε≺0可得

从而可证得系统是渐进稳定的,并且具有H∞抗干扰性能指标γ。证毕。
如果滤波器的矩阵参数是未知的,那么定理1给出来的充分条件是不可解的。为了解决这个问题,下面的定理给出了使得滤波误差系统(3)渐进稳定且具有H∞性能指标的滤波器参数设计的充分条件。
定理2对于给定的γ>0,如果存在对称正定矩阵R>0,S>0,Q>0,Z>0以及具有合适维数的矩阵,AF, BF,CF,DF使得矩阵不等式≺0及

成立,其中

成立,则系统(1)存在的滤波器(2)使得滤波误差系统(3)是渐进稳定的,且满足H∞性能指标γ。

证明假定定理1的正定对称P具有如下结构,且定义以及。

上述定理2给出了在网络环境下基于事件驱动数据传输方式下的滤波器设计方法。该方法可通过Matlab的LMI工具箱进行求解。
此外,事件驱动中的参数δ也同样可以被优化。在满足滤波器有解的情况下,寻找δ最大可行值,可以最大程度上降低数据的传输密度。此外,当δ=0时,所得结论即是传统的基于网络化的滤波器设计结果。因此,该方法得到的结果更具一般性。下面通过一个仿真算例来验证文中所得理论的有效性和优越性。
3 仿真举例
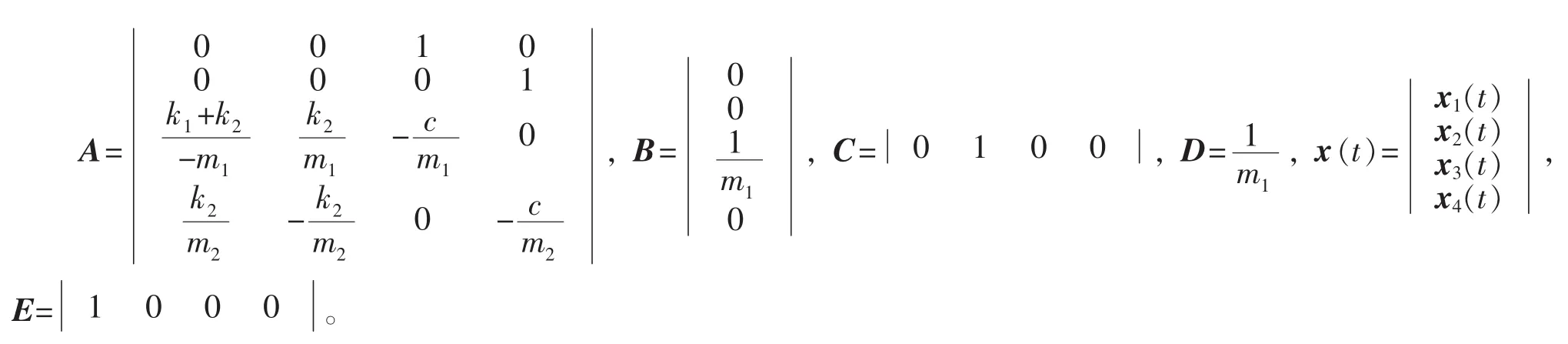
考虑一个由两个小车和弹簧连接的机械系统(见图2)。其中x1和x2分别表示小车m1和m2的位置,k1和k2分别为相应的弹簧系数。小车和水平面的摩擦力系数表示为c。定义以及,进而可得如下状态空间方程
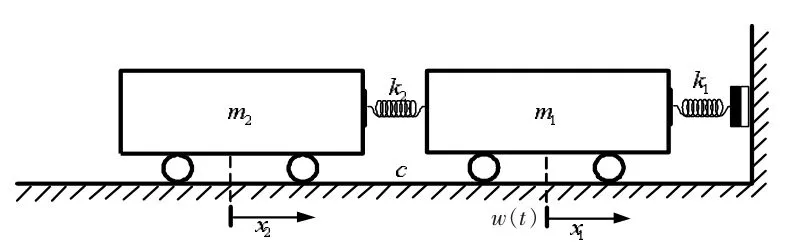
图2 小车弹簧系统
给定具体的参数值如下:m1=1,m2=0.5,k1=k2=1,c=0.5。此外采样周期h=0.1 s,Φ=I1×1,γ=0.3,外部噪声w(t)假定为w(t)=0.02sin(0.2t)。仿真的目标是为该系统设计基于事件驱动网络传输的H∞滤波器以及估计质量块m2的位置x2。
首先为了说明基于事件驱动机制的特点,分别取值δ=0.8和δ=0.2,用Matlab编程验证这两个值都有解,可设计出合适的滤波器。当取δ=0.8时,基于事件驱动的数据传输一共发生42次,如图3所示;取δ=0.2时,基于事件驱动的数据传输一共发生74次,如图4所示。通过图3和图4的对比,可以明显得出结论,当δ取值越大时,系统渐进稳定和满足H∞性能指标所需的传输数据越少。δ最大取值为1,可以保证系统滤波器条件是可解的。当δ=0时,基于事件触发传输机制转变成普通的定周期采样传输机制。
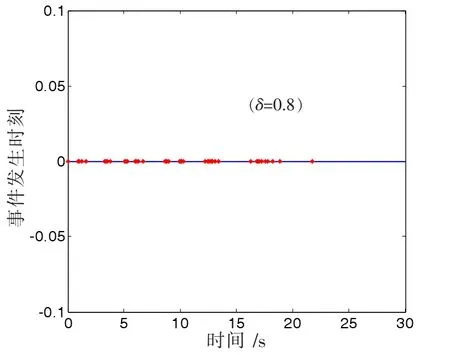
图3 事件驱动下数据传输触发时刻(δ=0.8)

图4 事件驱动下数据传输触发时刻(δ=0.2)
进一步取δ=0.2,可以设计具体的滤波器参数如下

而后利用所求取的滤波器对原机械系统进行基于网络化事件驱动机制的滤波,其系统状态值和滤波器状态值如图5所示;系统输出以及误差系统分别如图6和图7所示。由此可得,文中所设计的系统是有效的。
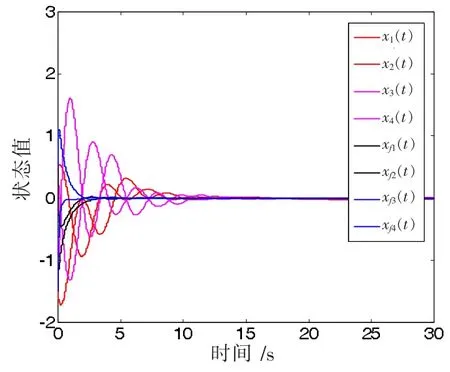
图5 事件驱动下系统状态值和滤波器状态值

图6 系统输出及滤波估计值

图7 滤波输出误差
文中应用基于事件驱动网络传数据传输机制,建立了新的基于网络化的滤波器设计方案。所得结果和传统的网络化滤波器设计方案相比,需要更少的传输数据,降低了数据传输密度,可以有效地避免网络堵塞。给出的基于小车-弹簧的模型仿真结果可以有效地证明基于事件驱动网络化传输环境下所设计滤波器的有效性和优越性。
[1]Yang G,Che W.Non-fragile H∞filter design for linear continuous-time systems[J].Automatica,2008,44(11):2849-2856.
[2]Fridman,E.Network-based H∞filtering of parabolic systems[J].Automatica,2014,50(12):3139-3146.
[3]Zhang L,Gao H,Kaynak O.Network-induced constraints in networked control systems:a survey[J].IEEE Transactions on Industrial Informatics,2013,9(1):403-416.
[4]Wu J,Chen X,Gao H.H∞filtering with stochastic sampling[J].Signal Processing,2010,90(4):1131-1145.
[5]俞立,凌荣耀,张丹.具有随机采样特性的网络化系统H∞滤波[J].控制与决策,2014,29(6):1035-1040.
[6]Zhao X,Tian E.Novel criteria on H∞filter design of linear networked control systems[J].IET Signal Processing,2013,7(1):1-13.
[7]Gao H,Chen T.H∞estimation for uncertain systems with limited communication capacity[J].IEEE Transactions on Automation Control,2007,52:2070-2084.
[8]Yang R,Shi P,Liu G.H∞filtering for discrete-time networked nonlinear systems with mixed random delays and packet dropouts[J].IEEE Transactions on Automatic Control,2011,56(11):2655-2660.
[9]Peng C,Yang T.Event-triggered communication and H∞control co-design for networked control systems[J].Automatica,2013,49(5):1326-1332.
Network-based H∞filtering via an event-driven approach
JIANG Changlong,LIU Ming
(School of Astronautics,Harbin Institute of Technology,Harbin 150001,China)
This paper investigates the network H∞filter design for a class of linear continuous-time systems.A new event-driven scheme was developed to conduct the data transmission between the system and the filter via network,which effectively reduced the transmission load.With the input-delay approach,we firstly formulated an extended filtering error system.With Lyapunov-Krasovskii functional approach,we presented the stability and existence condition of H∞performance index for the filtering error system in the form of linear matrix inequality(LMI).Then a filter design was given.Finally,an example with mechanical system was given to illustrate the effectiveness and the advantages of the event-driven network filter.
H∞filtering;linear continuous-time system;networked transmission;event driven
TP273
A
1672-0687(2015)04-0051-06
责任编辑:艾淑艳
2015-01-21
国家自然科学基金资助项目(64473096)
蒋昌龙(1991-),男,辽宁海城人。
*通信联系人:刘明(1981-),男,副教授,博士,博士生导师,E-mail:mingliu23@hit.edu.cn。