无人机搭载机载LiDAR在公路勘测中的应用
2015-02-23刘长全
■刘长全
(辽宁摄影测量与遥感院 辽宁沈阳 110034)
无人机搭载机载LiDAR在公路勘测中的应用
■刘长全
(辽宁摄影测量与遥感院 辽宁沈阳 110034)
通过对无人机载LiDAR系统获取的点云数据以及实测检查数据进行检测和分析,机载LiDAR可以快速获取高精度的DEM。无人机可以克服无人区、山区等人类不易到达的地方,具有良好的应用前景。
无人机雷达LiDAR无人机公路勘测无人机航测
长期以来,传统的以卫星遥感和载人航空遥感为手段的遥感数据获取技术,由于空间分辨率较低、重访周期较长、时效性较差、受空域管制等因素的制约,在应对各类勘测任务时,很难提供及时有效的信息。无人机遥感技术的发展很好地解决了这一难题。
无人机机载LiDAR不受日照和天气条件的限制,能全天候对地观测,LIDAR数据经过相关软件数据处理后,可以生成高精度的数字地面模型、等高线图,具有传统摄影测量和地面常规测量技术无法取代的优越性。这些特点使它在测绘和军事等方面的应用具有独特的优势。
1 我国公路勘测需求特点
(1)数据采集的速度较慢。
(2)劳动强度大。
(3)受天气变化的影响较大。
(4)受测区地形及植被情况影响较大。
(5)受道路运行情况等影响较大。
测量精度在地形复杂地区并不能满足公路设计的要求:在对于中桩的平面和高程测量中,路线的断面测量中,《公路勘测规范》、《公路勘测细则》中都有明确的规定。对于常规的测量方法,如在山区密林或地形复杂区域,用上面的方法在进行断面测量时,很难达到精度要求,有时偏差会很大,这也是公路施工中经常进行设计变更的主要原因之一。
2 LIDAR技术与常规测量技术比较
常规地面测量技术主要解决不了视野不开阔,对无人区,林区,山区等人类难以到达地点的测量。机载LiDAR最初目的是为了快速获取高精度的DEM,因为激光点可以部分透过植被的间隙而直接得到地面点的坐标,无人机可以克服无人区、山区等人类不易到达的地方,所以它的发展非常迅速。
LIDAR技术与常规测量技术比较主要从精度、费用、进度、自动化程度等方面进行,见下表。
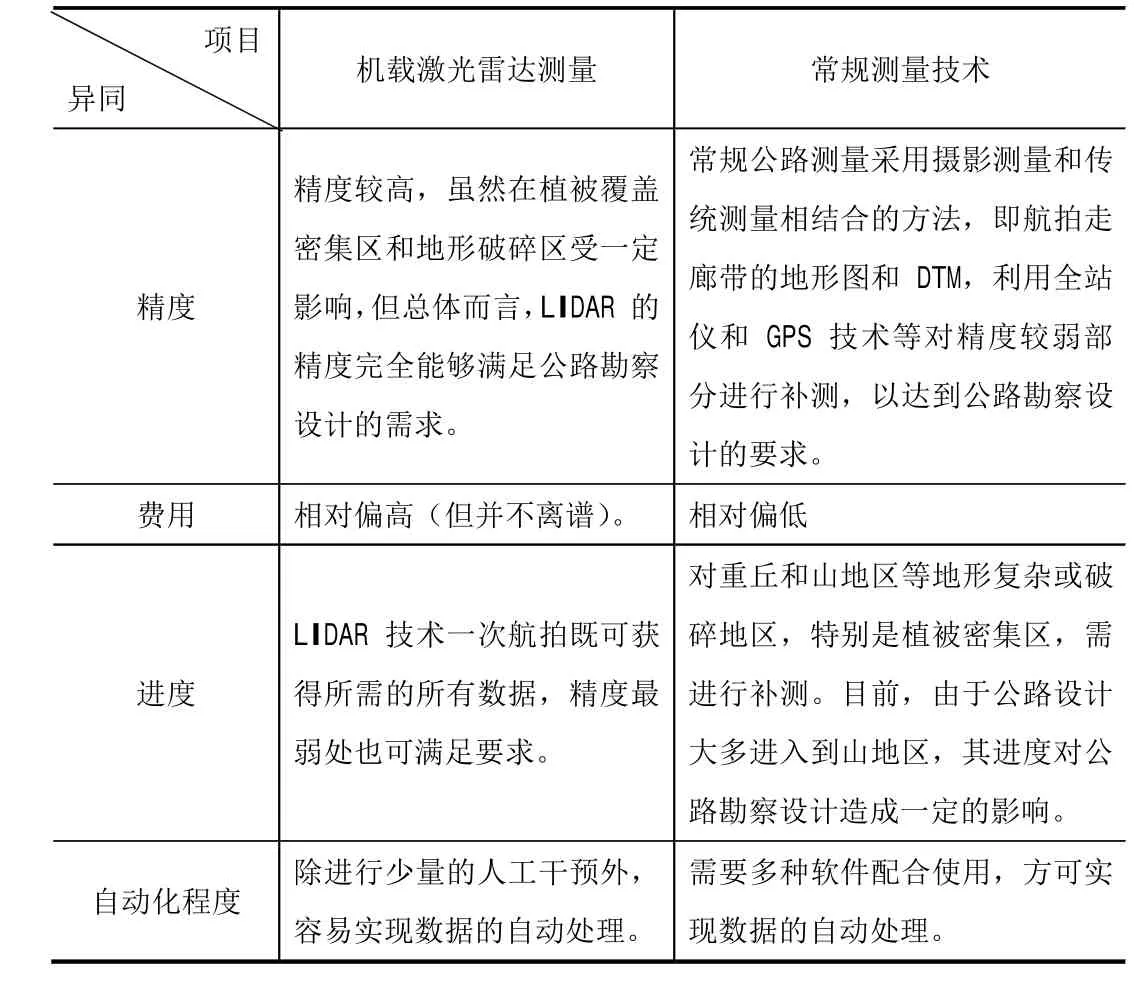
项目异同 机载激光雷达测量 常规测量技术精度精度较高,虽然在植被覆盖密集区和地形破碎区受一定影响,但总体而言,LIDAR 的精度完全能够满足公路勘察设计的需求。常规公路测量采用摄影测量和传统测量相结合的方法,即航拍走廊带的地形图和 DTM,利用全站仪和 GPS 技术等对精度较弱部分进行补测,以达到公路勘察设计的要求。费用 相对偏高(但并不离谱)。 相对偏低进度LIDAR 技术一次航拍既可获得所需的所有数据,精度最弱处也可满足要求。对重丘和山地区等地形复杂或破碎地区,特别是植被密集区,需进行补测。目前,由于公路设计大多进入到山地区,其进度对公路勘察设计造成一定的影响。自动化程度 除进行少量的人工干预外,容易实现数据的自动处理。需要多种软件配合使用,方可实现数据的自动处理。
3 无人机机载激光雷达测量系统组成
机载激光雷达测量系统的主要组成部分:(1)动态差分GPS接收机:确定激光雷达信号发射参考点空间位置;(2)INS:测定扫描装置的主光轴姿态参数;(3)激光测距仪:测定激光雷达信号发射参考点到地面激光脚点间的距离。

图1 机载激光雷达测量系统组成
无人机机载激光雷达对地定位原理:
LIDAR对地定位原理如下:若空间有一向量S,其模为S,方向为(a,b,c),如能测出该向量起点Os的坐标(Xs,Ys,Zs),则该向量另一端点P的坐标(X,Y,Z)可唯一确定。对于机载激光测量系统来说,起点Os为遥感器光学系统的投影中心,起点坐标(Xs,Ys,Zs)可利用动态差分GPS或精密单点定位技术测定;向量S的模是由激光测距系统测定的机载激光测距仪参考中心到地面激光脚点间的距离;姿态参数(a,b,c)可利用高精度姿态测量装置获得。如今,高精度的动态差分GPS和惯性导航系统已成为可能,通过对一系列影响机载激光雷达测量技术的误差(如激光测距光学参考中心相对于GPS天线相位中心的偏差、激光扫描仪机架三个安装角的误差、惯性导航测量系统机体同载体坐标轴系间的不平行等)进行误差处理,获得高精度的激光点云数据就成为了可能。
机载激光雷达测量系统通过动态差分GPS精确测定传感器在空中的位置,通过POS测定传感器的姿态参数与通过激光扫描仪测得传感器到地面目标精确距离的方法实现对地定位。惯性测量技术、GPS定位技术与激光测距技术的迅速发展和集成实现了机载激光雷达测量系统对地定位。
机载激光雷达对地定位的坐标转换顺序是:瞬时激光束坐标系→激光扫描参考坐标系→载体坐标系→惯性平台参考坐标系→WGS-84坐标系。各坐标系之间的转换关系如图2。
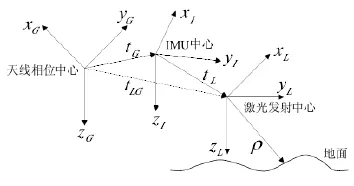
图2 机载LIDAR系统中坐标系之间的转换关系
4 无人机搭载激光雷达数据处理流程
4.1 DLG、DEM、DOM成图流程
无人机载激光雷达在公路勘察设计中的具体工作流程见图3。在飞行作业前,要先进行详细的飞行计划安排,包括飞行的航线、航带间的重叠度、飞行高度、飞行速度等。此外还要进行飞行前的参数检测,然后按预定的航线进行航飞,测完后,还要进行飞行后的参数检较。

图3 无人机载激光雷达在公路勘察设计中的具体工作流程图
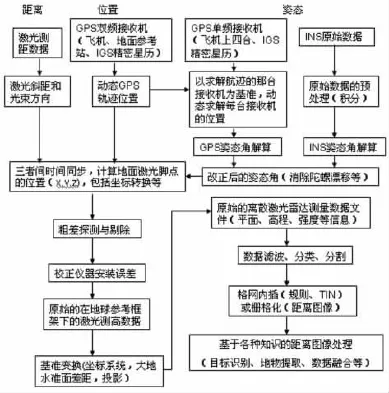
图4 lidar点云和pos数据预处理的具体流程图
4.2 lidar点云和pos数据预处理流程
完成野外飞行任务后,可得到两组数据:飞机位置和姿态数据以及瞬时扫描角的激光距离测量值。其中,lidar点云和pos数据预处理的具体流程见图4。
5 LIDAR在公路勘察设计中的应用
5.1 数字地形图和数字正射影像图测绘
通过对LIDAR获取的点云数据和其他附属数据进行后处理后,可提供数字正射影像图和数字地形图。数字地形图比例尺通常为1∶500,数字正射影像图分辨率通常为0.05 m以上,满足公路勘察设计的可行性研究、初步设计和施工图设计等各个阶段的需求。同时,数字正射影像图提供了走廊带的一种直观影像,与其他遥感影像数据和地理数据融合后,即可进行公路勘察、不良地质路段勘察、公路遥感选线等工作,极大地提高了传统公路勘察选线的速度。针对公路行业,目前数字地形图和数字正射影像图的获取主要通过摄影测量技术进行。
5.2 数字地面模型测绘
数字地面模型(Digital Terrain Model:DTM)在公路勘察设计中的应用主要集中在提供纵、横断面数据和为三维公路辅助设计提供基础地理数据。数字地面模型有3种数据源:摄影测量、地形图数字化和野外实测。地形图数字化由于受地形原图精度、扫描矢量化精度等影响,精度和速度都远远达不到现行公路勘察设计的速度。野外实测无疑是精度最高的一种测量方法,但由于受其测量速度的影响,特别是进入重丘和山地等地形复杂地区,该方法并非首选。摄影测量技术无论在提供带状地形图还是数字地面模型方面是目前工作的主流,其精度和速度在一定程度上满足要求,但摄影测量技术不但受天气影响,而且在植被密集区和破碎地形区,精度受一定影响。LIDAR技术的出现,能够很好地解决摄影测量技术存在的问题,但由于出现的时间短,受价格等多方面因素的影响,其推广还有一定的难度。
5.3 其他应用
通过机载LIDAR获取的DTM与0.05m高分辨率影像进行叠加,建立工程区域真实地形地貌三维显示,遥感解译人员可直接对滑坡、崩坍、岩溶等不良地质的形状、大小、边界、表面形态等地形地貌要素能直接进行遥感分析和信息采集,极大提高了不良地质遥感解译的精确度、准确度与可信度。同时,DTM和高分辨率正射影像还可为三维辅助公路设计提供基础地理数据,使得公路设计人员能够直观地进行选线,以及桥梁、隧道、涵洞等构造物的设置。
6 结语
无人机搭载载LIDAR提供的1∶500数字地面模型、1∶500地形图和数字正射影像图的平面及高程精度满足 《公路勘测规范》(JTGC10—2007)要求,但由于其施测过程不需要太多首级控制点,故需布设施测或加密首级控制网并进行相应等级水准测量。由于机载激光雷达数据作为一项新技术,国家并未出台相关的规范和标准,数据精度评定仍需参照传统相关规范。
P217[文献码]B
1000-405X(2015)-10-235-2
