多定子永磁直线同步电机绕组切换故障特性研究
2015-02-23张宏伟余发山王新环王福忠
张宏伟,余发山,王新环,王福忠
(河南理工大学电气工程与自动化学院,河南焦作 454000)
多定子永磁直线同步电机绕组切换故障特性研究
张宏伟,余发山,王新环,王福忠
(河南理工大学电气工程与自动化学院,河南焦作 454000)
针对多定子永磁直线同步电机(PMLSM)运行过程中绕组切换故障可能引起的失步问题,研究了绕组切换故障特性。在分析PMLSM推力功角特性的基础上,研究了频率对稳定运行区间的影响规律,建立了考虑出入端效应的多定子PMLSM推力模型,研究了绕组切换故障对稳定性的影响规律,利用样机进行了实验研究,得到了一台及两台绕组切换故障时,电机运行频率、运行方式对运行特性的影响规律。研究结果表明:低速PMLSM的电阻效应不能忽略,动子所受正向推力作用空间变小,负向推力作用空间增大。相同数量的绕组失电,提升运行时较易失步。失电绕组越多,剩余电机承担电流越大,越易引起失步。
永磁直线同步电机;多定子;推力功角特性;绕组切换故障
0 引言
永磁直线同步电机(permanent magnet linear synchronous motor,PMLSM)用于运输系统已成为国内外研究的热点,其基本形式有水平运输系统和垂直运输系统[1-7]。PMLSM被用于超高层建筑、超深矿井提升和航空母舰舰载升降机中将体现出突出的优越性:不需要提升钢丝绳,提升速度快,提升高度不受限制,可实现多罐笼(轿厢)同时升降,大大提高运输效率,易实现多种电气制动等[1-3]。
在长行程应用场合中,PMLSM通常采用电枢绕组作为定子、永磁体作为动子的结构,即长初级短次级型PMLSM[4-5]。为了降低每相绕组的电流等级、减小损耗、提高系统效率、方便安装维护,通常将定子电枢绕组分段设计,组成多定子PMLSM。绕组分段PMLSM(segmentwindingPMLSM,SWPMLSM)[7]只将初级绕组分段而初级铁心未分段,推力波动较小。在绕组分段PMLSM运行过程中,可能会出现绕组切换失败故障,引起绕组切换失败的原因主要有:
1)位置信号丢失或绕组切换执行机构故障导致即将预先接通的电机定子无法接通。
2)绕组切换执行机构故障导致运行过程中已经投入运行的电机定子突然失电。
绕组切换失败将产生较大的推力波动,直接影响电机的稳定运行。因此,需要研究SW-PMLSM绕组切换失败时的故障特性,研究运行频率、运行方式、失电定子数量对运行特性的影响规律,为SWPMLSM的稳定运行控制提供理论基础及实验数据。
文献[8]分析了垂直运动PMLSM的运行特性,讨论了垂直运动PMLSM的动力制动特性、能耗制动特性,其结论对PMLSM的设计和垂直运行控制策略研究具有指导价值。文献[9]分析了垂直运动PMLSM稳定性,提出了功角控制策略,将直线电机的稳定控制引入到最大推力控制中,实现直线电机的速度控制。文献[3-4,10-11]研究了定子分段PMLSM垂直提升系统的建模、仿真及实验方法。文献[12-15]研究了SW-PMLSM的控制方法,提出了基于电流误差矢量的电流预测控制,优化段间推力。文献[16-17]研究了多定子直线感应电动机的建模、控制方法、调度策略及故障模式下的电流过载特性。文献[18]针对分段供电直线感应电机提出了一种快速诊断电机分段供电状态的检测算法。
关于多定子PMLSM绕组切换故障对运行特性影响的研究较少,本文针对SW-PMLSM提升系统,研究低速PMLSM推力功角特性,探讨绕组切换对电机运行特性的影响,以及绕组切换失败的故障特性,并进行实验研究。为SW-PMLSM的稳定运行控制提供理论基础及实验数据。
1 低速PMLSM推力功角特性
PMLSM与旋转永磁同步电机一样有功角的概念,表示定子绕组电压与励磁电势之间的电角度。推力功角特性是永磁电机的重要特性,PMLSM的电磁推力可以表示为[8]:

式中,Us为定子绕组电压,E0为励磁电势,vs为同步速度,rs为电枢相电阻,XT为同步电抗,θ为功角。一般情况下rs≪XT,忽略rs影响时的电磁推力为:

式(2)为一正弦变化的曲线,θ=90°对应最大电磁推力,最大电磁推力为:

对于低速PMLSM,当运行频率较低时,电枢电阻压降作用会显著增大。本文研究的SW-PMLSM额定运行频率为23 Hz,XT=16.6Ω,rs=13.4Ω,此时电阻作用已不能忽略。考虑电阻作用的电磁推力如式(4),特性曲线如图1所示。


图1 推力功角特性曲线Fig.1Characteristic of thrust power angle
从图1可以看出,考虑到电阻效应时,推力为0时的功角减小为负值,最大推力对应的功角也减小,正向推力作用区间小于负向推力作用区间。
对实验样机单元PMLSM的推力功角特性进行了有限元仿真。通过改变端电压初始相位来改变功角θ,求取不同功角下的稳态推力[10],单元PMLSM的推力功角特性仿真曲线如图2所示。

图2 单元PMLSM推力功角特性仿真曲线Fig.2Simulation of thrust power angle for unit PMLSM
从图2可以看出,仿真结果与理论分析一致,低速PMLSM的运行频率较低时,电枢电阻的压降作用显著增加,具有大电阻小电抗的特点,推力为0时的功角减小为负值,最大推力对应的功角也减小,正向推力作用区间小于负向推力作用区间。在提升过程中遇到绕组切换故障,将更容易引起电机出现失步故障。
2 频率对PMLSM推力功角特性的影响
文献[8-9]分析了V/f控制方式下频率变化对PMLSM推力的影响规律,指出若电源频率和电压同时变化K倍,则最大电磁推力不变,但最大电磁功率变化到原来的K倍,上述文献未考虑电阻的影响。对于低速PMLSM,当其运行频率较低时,电枢电阻的压降作用显著增加。因此需要分析当电阻不能忽略时,采用V/f控制方式下频率变化对PMLSM推力的影响规律。
设额定频率为f时,电源电压、励磁电势、同步速度和同步电抗分别为Us、E0、vs、XT,假定频率和电压同时被减少到Kf和KUs,则E0、vs和XT将分别变为KE0、Kvs和KXT,电枢电阻rs不变,频率和电压变化后对应的电磁推力为:


对单元PMLSM在不同运行频率下的推力功角特性进行了仿真,仿真图如图3所示。
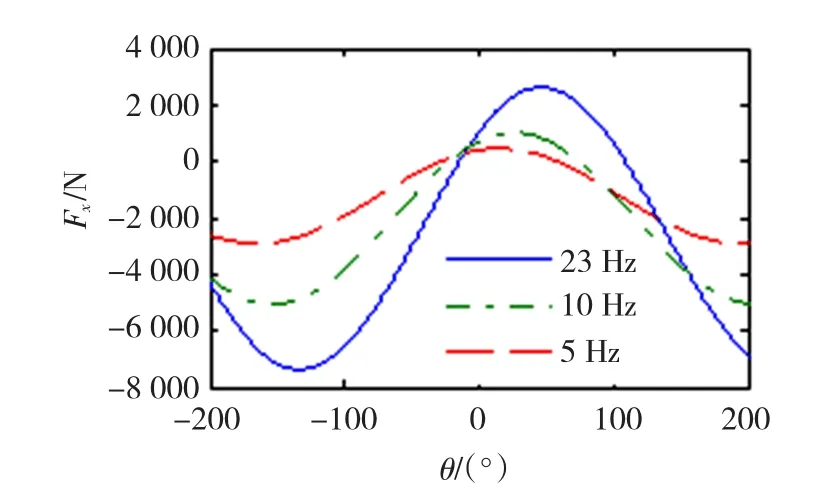
图3 不同频率下的推力功角特性曲线Fig.3Characteristic curves of thrust power angle under different frequency
额定频率运行时,f=23 Hz,vs=1.03 m/s,XT= 16.6 Ω,rs=13.4 Ω,E0=166 V,Us=220 V,α= arctan(rs/XT)=0.68,对应的电磁推力为:

从图3可以看出,运行频率越低,电阻作用越明显。随着频率的降低,正向最大推力及推力作用空间减小;负向最大推力及推力作用空间增大。为了改变低频推力特性,需要提高PMLSM低频运行时的输出电压,即进行推力补偿,以产生足够的推力,防止正向运行(提升)时发生失步故障。
3 绕组切换故障对多定子PMLSM推力的影响规律
本文研究的SW-PMLSM为U型长初级短次级隐极型PMLSM,主要用于垂直提升系统。PMLSM的初级定子由三相绕组及轭部组成,采用分段结构;次级由磁体粘附在次级轭部钢板上组成。U型PMLSM结构示意图如图4所示。
在SW-PMLSM运行过程中,单元电机绕组采用递推方式切换,根据动子位置信号,控制绕组切换执行机构提前将动子耦合的单元绕组通电,实现SWPMLSM的分段供电。为保证连续可靠运行,需要提前接通一台单元电机定子绕组。对于动子长度等于N台定子长度的SW-PMLSM,在其运行过程中将有一台定子绕组逐渐退出与永磁体动子的耦合,一台定子绕组逐渐进入永磁体励磁磁场,N-1台定子完全与永磁体励磁磁场耦合。

图4 U型SW-PMLSM结构示意图Fig.4Structure diagram of U-type SW-PMLSM
在忽略铁心饱和时,PMLSM的气隙磁场可以等效为电枢反应磁场和永磁励磁磁场的叠加,当PMLSM的动子永磁体位于x0
位置时,PMLSM的气隙磁场可以表示为:

假设A、B、C三相电枢绕组电流均匀分布于相应槽口中间位置,可以得到电机推力表达式为:

式中,l为绕组有效长度,s为永磁动子与初级电枢耦合部分的纵向长度,ia(t)、ib(t)、ic(t)为t时刻A、B、C三相绕组电流。
对于动子与绕组完全耦合的单元电机,推力基本不变;对于绕组逐渐退出动子永磁体励磁磁场的单元电机来讲,动子永磁体与定子电枢的耦合面积逐渐减小,所以电磁推力也逐渐减小;而对于电枢绕组逐渐进入动子永磁体励磁磁场的单元电机来说,电磁推力逐渐增大[11]。
为了精确地分析出入端效应对电磁推力的影响规律,需要经过严格的公式推导与证明。为了简化计算,以整距绕组平板PMLSM为例,分析动子退出一台定子,同时进入另一台定子所受到合力的变化情况。绕组切换示意图如图5所示,动子以速度v离开1#定子并进入3#定子。

图5 SW-PMLSM定子绕组切换示意图Fig.5Sketch of SW-PMLSM windings switching
设三相电流为iA、iB、iC,1#定子和3#定子的感应电动势分别为eA1、eB1、eC1,eA3、eB3、eC3。1#定子、3#定子作用给动子的电磁推力分别为:

式中,上标代表线圈标号。
在图5所示位置,1#、3#定子中各线圈的感应电势可以分别用式(15)、(16)计算:

式(17)与式(18)相等,同理可以证明B、C相也同样存在上述关系,说明此时刻1#、3#两台定子与完全耦合的2#定子对动子的作用效果相同。因此,在不考虑绕组切换时,SW-PMLSM可看成一个长初级短次级型PMLSM。
根据失电定子绕组的数量可以分为1台定子失电、2台定子失电等,根据失电定子所在位置,可以分为三种情况:逐渐进入动子永磁体励磁磁场的定子失电、逐渐离开动子永磁体励磁磁场的定子失电、完全耦合的定子失电。根据前文分析,逐渐进入和逐渐退出动子励磁磁场的定子对电机推力的贡献较小,其切换故障产生的扰动较小,因此本文只分析完全耦合的定子失电时对运行特性的影响。
假设SW-PMLSM动子长度等于N台定子长度,SW-PMLSM总电磁推力为各段电机推力之和,

式中,i为绕组切换位置,Fi、Fi+N分别为逐渐退出和逐渐进入动子永磁体励磁磁场的定子产生的推力,其大小随动子位置而变化。
当完全耦合的一台定子绕组失电时,总推力减少1/N,两台定子失电时,总推力突然减少2/N,上述故障将引起电机推力功角特性的改变。假设正常运行及故障状态下的推力功角特性曲线如图6所示,Fl为负载力。

图6 稳定运行及故障状态下的力功角特性曲线Fig.6Thrust-angle curve of stable and failing mode
当完全耦合的一台定子绕组失电时,推力功角特性曲线变为曲线2,如果特性曲线2对应的最大电磁推力仍大于负载力,由于动子惯性,功角θ角不能突变,仍为θ1,运行点将由a转移到曲线2上的b点,由于此时电磁推力小于负载力,动子将减速,θ角增大,由b点沿曲线2向c点运动,当运行到c点时,Fx=Fl,经过衰减振荡后,电机可以稳定运行在a点。
当完全耦合的两台定子绕组失电时,推力功角特性曲线变为曲线3,如果特性曲线3对应的最大电磁推力小于负载力,根据垂直运行PMLSM暂态稳定性,电机将不能稳定运行,导致失步。
因此,对于垂直运动的多定子PMLSM,如果提升载荷越大,失电电机数量越多时,将越容易引起失步。同时,根据前文分析,由于低速PMLSM的电阻效应不能忽略,反向(下降)稳定运行区间大于正向(提升)稳定运行区间。对于同样的载荷,相对于正向运行,反向运行时不易引起失步。
4 实验验证
为了验证理论分析的正确性,我们利用图7所示的SW-PMLSM提升系统样机进行了实验研究。测试SW-PMLSM以不同频率提升、下降时,绕组切换故障模式下的运行特性。

图7 样机实物图Fig.7Photograph of the prototype machine
样机参数如下:额定功率35 kW,额定载荷3 000 kg,额定运频率23 Hz,额定速度1.03 m/s,单台定子长度360 mm,定子分段数量50台,动子长度3 600 mm。
SW-PMLSM定子绕组采用并联方式,由一台变频器供电,变频器工作在V/f控制模式。绕组切换采用递推方式,根据动子位置信号将与动子耦合的单元电机定子绕组通电。运行过程中,10台定子绕组完全处于动子永磁体励磁磁场范围内。
1)正常运行
SW-PMLSM载荷1 000 kg,绕组切换无故障,以10 Hz频率提升时的电机运行速度、变频器输出侧电流(有效值)波形如图8所示。10 Hz对应的运行速度为0.44 m/s。

图8 10Hz提升过程速度和电流曲线Fig.8Curve of speed and current lifting with 10 Hz
从图8中可以看出,在正常运行情况下,速度波形较为平稳,电流有周期性的波动。电流周期性波动主要是由于单元电机定子绕组切换引起的。
2)10 Hz提升过程中,1台定子绕组切换故障
在SW-PMLSM提升运行频率达到10 Hz时,切除中间一台已经耦合的电机定子绕组,此时电机速度及变频器输出侧电流(有效值)的波形如图9所示。
从图9可以看出,10 Hz提升运行过程中1台电机失电时的电机运行速度、电流波动较小。

图9 10Hz提升过程1台失电时的速度和电流曲线Fig.9Curve of speed and current lifting with 10Hz when one winding switching failure
3)10 Hz提升过程中,2台定子绕组切换故障
在提升运行频率达到10 Hz时,切除中间2台已耦合的电机定子绕组,此时电机速度及变频器输出侧电流(有效值)的波形如图10所示。

图10 10Hz提升过程2台失电时的速度和电流曲线Fig.10Curve of speed and current lifting with 10 Hz when two windings switching failure
在SW-PMLSM10 Hz提升运行过程中2台电机失电时,其余8台电机分担原有10台电机的载荷,每台正常工作电机电流均增加约28%,扰动较大,将引起速度、电流的剧烈震荡。从图10中可以看出,速度、电流波动非常大,容易引起电机失步。需要采用相应的稳定运行控制措施。
4)10 Hz下降过程中,2台定子绕组切换故障
在下降运行频率达到10 Hz时,切除中间2台电机定子绕组,此时电机速度及变频器输出电流(有效值)的波形如图11所示。
对比图10和图11可以看出,在10 Hz下降运行过程中2台电机失电时速度波动小,电机可以稳定运行。实验结果和理论分析一致,由于低速PMLSM的电阻效应,反向运行时稳定区间较大,因此同样是2台电机失电,反向(下降)运行时电机速度、电流波动较小,不易引起电机失步。
5)5 Hz提升过程中,1台定子绕组切换故障
在提升运行频率达到5 Hz时,切除中间已经耦合的一台电机定子绕组,此时电机速度及变频器输出电流(有效值)的波形如图12所示。

图11 10Hz下降过程2台失电时的速度和电流曲线Fig.11Curve of speed and current descending with 10Hz when two windings switching failure

图125 Hz提升过程1台失电时的速度和电流曲线Fig.12Curve of speed and current lifting with 5 Hz when one winding switching failure
对比图9和图12可以看出,同样是提升过程中1台电机失电,5 Hz运行时电流及速度波动大。原因是5 Hz运行时的电阻效应比10 Hz时大,电机正向稳定运行区间小于10 Hz时的稳定运行区间。实验结果和理论分析一致。
5 结论
本文对低速PMLSM的推力功角特性进行了深入研究,详细分析了考虑电枢电阻作用下的供电频率、电阻对推力功角特性以及运行稳定性的影响,探讨了绕组切换故障对SW-PMLSM运行特性的影响规律,并进行了实验验证。研究结果表明:
1)低速PMLSM的运行频率较低时,电枢电阻的压降作用显著增加,电阻效应不能忽略,运行频率越低越容易引起失步,增加电机的运行频率,电抗增加,电阻效应减小,有助于防止失步。因此,设计电机时应提高低速PMLSM的额定运行频率。
2)由于低速PMLSM的电阻效应,永磁体动子所受正向推力的作用区间将变小,负向推力作用空间增大,即负向(下降)稳定运行区间大于正向(提升)稳定区间;相同数量的绕组失电,下降运行时较平稳,不易引起失步。低频运行时,需要对推力特性进行补偿。
3)电机失电绕组数量越多,剩余电机承担电流越大,扰动越大,越容易引起失步。需要采取容错控制方法,在电机绕组切换故障时,补偿剩余电机的推力,保证SW-PMLSM的稳定运行。
[1]GIERAS J F,PIECH Z J,TOMCZUK B.Linear Synchronous Motors:Transportation and Automation Systems[M].Second Edition.CRC Press,2012:367-384.
[2]TAKAHASHI N,YAMADA T,MIYAGI D,et al.Basic study of optimal design of linear motor for rope-less elevator[C]//IET 7th International Conference on Computation in Electromagnetics,Brighton,UK.2008,537CP:202-203.
[3]WANG Xudong,FENG Haichao,XU Baoyu,et al.Research on rope-less hoist system driven by PMLSM[J].Advanced Materials Research,2011,216:539-543.
[4]王淑红,熊光煌.垂直运动分段式永磁直线同步电动机建模[J].中国电机工程学报,2009(S1):205-209.
WANG Shuhong,XIONG Guangyu.Modeling of permanent magnet linear synchronous motor for segmental primary and vertical movement[J].Proceedings of the CSEE,2009(S1):205-209.
[5]GURBUZ C,KAZAN E,ONAT A,et al.Linear motor for multi-car elevators,design and position measurement[J].Turk.J.Elec.Eng.&Comp.Sci.,2011,19:827-838.
[6]WIELER J G,THORNTON R D.Linear synchronous motor elevators become a reality[J].Elevator world,2012,60(5):140-143.
[7]洪俊杰.绕组分段永磁直线同步电机电流预测控制的研究[D].哈尔滨:哈尔滨工业大学,2010.
[8]焦留成,袁世鹰.垂直运动永磁直线同步电动机运行特性分析[J].中国电机工程学报,2002,22(4):37-40.
JIAO Liucheng,YUAN Shiying.Study on operating characteristics of permanent magnet linear synchronous motor for vertical movement[J].Proceedings of the CSEE,2002,22(4):37-40.
[9]张宏伟,焦留成,王新环,等.永磁直线同步电动机功角控制策略的研究[J].煤炭学报,2005,30(4):529-533.
ZHANG Hongwei,JIAO Liucheng,WANG Xinhuan,et al.Research on the control strategy of power angle of permanent magnet linear synchronous motor[J].Journal of China Coal Society,2005,30(4):529-533.
[10]WANG Xudong,FENG Haichao,XU Baoyu,et al.Research on permanent magnet linear synchronous motor for rope-less hoist system[J].Journal of Computers,2012,7(6):1361-1368.
[11]上官璇峰,励庆孚,袁世鹰,等.不连续定子永磁直线同步电动机运行过程分析[J].西安交通大学学报,2004,38(12): 1292-1295.
SHANGGUAN Xuanfeng,LI Qingfu,YUAN Shiying,et al.Analysis on running process of permanent linear synchronous motors with discontinuous stators[J].Journal of Xi’an Jiaotong University,2004,38(12):1292-1295.
[12]李立毅,祝贺,刘家曦,等.初级绕组分段永磁直线电机段间推力优化控制[J].电机与控制学报,2014,18(4):80-87.
LI Liyi,ZHU He,LIU Jiaxi,et al.Optimal inter-segment thrust control applied in primary winding segmented PMLSM[J].Electric Machines and Control,2014,18(4):80-87.
[13]HONG Junjie,PAN Donghua,ZONG Zhijian.Comparison of the two current predictive-control methods for a segment-winding permanent-magnet linear synchronous motor[J].IEEE Transactions on Plasma Science,2013,41(5):1167-1173.
[14]李鹏.初级绕组分段结构永磁直线同步电机的研究[D].哈尔滨:哈尔滨工业大学,2008.
[15]洪俊杰,李立毅.基于电流误差矢量的绕组分段永磁直线同步电机电流预测控制[J].中国电机工程学报,2011,31(30): 77-84.
HONG Junjie,LI Liyi.Current error vector based prediction control of currents in segment winding permanent magnet linear synchronous motor[J].Proceedings of the CSEE,2011,31(30): 77-84.
[16]马名中,马伟明,王公宝,等.多定子直线感应电动机任务交班控制策略[J].电机与控制学报,2012,16(3):1-7.
MA Mingzhong,MA Weiming,WANG Gongbao,et al.Assignment alternating strategy of multiple primaries linear induction motor[J].Electric Machines and Control,2012,16(3):1-7.
[17]马名中,马伟明,张育兴,等.多定子直线感应电机故障模式下的电流过载特性[J].中国电机工程学报,2013,33(8):96-102.
MA Mingzhong,MA Weiming,ZHANG Yuxing,et al.Phase current overload characteristics of multi-primary linear induction motors under failure modes[J].Proceedings of the CSEE,2013,33(18):96-102.
[18]崔小鹏,王公宝,马伟明,等.直线电机分段供电故障诊断研究[J].电机与控制学报,2013,17(8):46-51.
CUI Xiaopeng,WANG Gongbao,MA Weiming,et al.Research on fault diagnosis of segment-powered linear induction motor[J].Electric Machines and Control,2013,(08):9-14.
(编辑:张诗阁)
Research on characteristics of multi-primary permanent magnet linear synchronous motors under switching failure modes
ZHANG Hong-wei,YU Fa-shan,WANG Xin-huan,WANG Fu-zhong
(School of Electrical Engineering&Automation,Henan Polytechnic University,Jiaozuo 454000,China)
Since the windings of multi-primary permanent magnet linear synchronous motor(PMLSM) switching failure may cause motor lose step,characteristics of windings switching failure was researched.On the analysis of thrust power angle characteristic of PMLSM,the influence of frequency on stable operation area was researched.The thrust model with entry and exit effect of multi-primary PMLSM was constructed and the influence of windings switching failure on stable characteristic was researched.A multiprimary PMLSM prototype was applied to experiments.The influence of motor operating frequency and operation mode on running characteristics was obtained when one or two primary windings switching fails.The research results show that the impact of primary resistance is not negligible when the operating frequency of PMLSM is low.The forward thrust stable operation region is reduced and downward stable operation region is increased.If the stator windings switch failed when going upward,the motor is easy to out of step.The more number of switching failure windings is,the greater current of residual windings is,and the easier of the PMLSM is out of step.
permanent magnet linear synchronous motor;multi-primary;thrust angle characteristic; winding switching failure
10.15938/j.emc.2015.03.006
TM 359.4
A
1007-449X(2015)03-0030-07
2014-01-20
国家自然科学
(61240049);河南省高等学校控制工程重点学科开放实验室项目(KG2014-05);河南省教育厅项目(13B413025)
张宏伟(1980—),男,博士研究生,副教授,研究方向为直线电机控制;
余发山(1952—),男,硕士,教授,博士生导师,研究方向为直线电机控制、工业过程控制;
王新环(1979—),女,硕士,副教授,研究方向为机电装备控制;
王福忠(1961—),男,博士,教授,研究方向为智能控制。
张宏伟
