多波长激振模式的螺纹副驱动型超声电机
2015-02-23程廷海王良高焓包钢王英廷
程廷海,王良,高焓,包钢,王英廷
(1.长春工业大学机电工程学院,吉林长春 130012;2.哈尔滨工业大学机电工程学院,黑龙江哈尔滨 150080)
多波长激振模式的螺纹副驱动型超声电机
程廷海1,王良1,高焓2,包钢2,王英廷1
(1.长春工业大学机电工程学院,吉林长春 130012;2.哈尔滨工业大学机电工程学院,黑龙江哈尔滨 150080)
为了提高螺纹副驱动型超声电机的输出力,改善定子与输出轴间的接触驱动状态,将12片压电片粘贴至筒状金属弹性体外表面构成定子,激发定子产生一个沿圆周方向行进的波长数为3的驱动行波,实现对螺纹输出轴的驱动,提出一种多波长激振模式的螺纹副驱动型超声电机。给出了电机的设计结构,阐明了定子多波长激振模式的激励方法,利用有限元法对定子的振动模态进行了仿真分析,研制出一台定子尺寸长×宽×内径为36 mm×30 mm×M24 mm的原型样机。实验结果表明,采用多波长激振模式可以实现螺纹副驱动型超声电机的有效驱动,电机的输出速度与输出力随激励电压的增大而线性增大。样机工作频率为52.1 kHz,在激励电压有效值42 V时,最大输出力可达40 N。
超声电机;螺纹;行波;多波长;输出力
0 引言
超声电机是近年来迅速发展起来的一种新型驱动器,主要是将压电元件与金属弹性体复合构成定子(也称超声振子),利用逆压电效应激发金属弹性体产生微幅超声振动(一般大于16 kHz),通过定子与动子间的摩擦耦合实现运动输出。与传统的电磁电机相比,超声电机具有低速大力矩、动态响应快、定位精度高、无电磁干扰等特点[1-2]。
螺纹副驱动超声电机作为目前诸多输出类型超声电机中的一种,其定子与输出轴间主要采用螺纹副进行运动传递。这种驱动方式一方面可以实现输出轴的旋转与直线两自由度运动输出,另一方面通过采用高精度传动螺纹副可实现高定位精度与高输出力的目的。目前螺纹副驱动超声电机已在医疗器械与精密驱动控制机构中得到了成功应用[3-5]。
美国的Henderson等利用自由约束的中空方柱型金属定子空间上相互正交的一阶弯曲振动耦合,先后研制出定子长×宽×螺纹直径为20 mm×8 mm ×M4.75 mm与6 mm×1.55 mm×M 0.9 mm两种尺寸的压电片贴片式螺纹副驱动超声电机。其中前者的工作频率约为40 kHz,可以产生0.5 N的输出力,位置分辨率可达20 nm[6-7]。中国学者赵淳生院士等人通过动力学分析推导出该类电机定子驱动点的空间运动轨迹方程,据此揭示了电机的运行机理,研制出同类样机,实现了该电机的较好驱动[8-9]。清华大学的周铁英教授等人利用薄壁圆筒的面内弯曲振动模态实现了一种多棱面螺纹副驱动型超声电机,并将其应用于光学调焦控制系统中[10-11]。本文作者则对利用柱状定子的二阶弯曲振动模态的驱动机理进行了初步探索[12]。已有文献表明,螺纹副驱动型超声电机的输出力一般为数牛级,因此如何提高电机的输出力,成为当前研究的热点与难点。
为了提高螺纹副驱动型超声电机的输出力,改善电机定子与螺纹输出轴间的接触驱动状态,本文提出了一种采用多波长激振模式的螺纹副驱动型超声电机。文中给出了电机的整体设计结构,分析了多波长激振模式的实现方法,利用有限元软件对电机定子的振动模态进行了仿真研究,研制出原型样机,测试了样机的输出特性,完成了实验验证。
1 电机结构
图1所示为本文提出的多波长激振模式螺纹副驱动型超声电机的结构示意图。电机主要包括金属弹性体、压电片与螺纹输出轴三部分。其中电机定子由中空筒状金属弹性体与压电片通过环氧树脂胶粘接构成。中空筒状金属弹性体采用黄铜材料,外形尺寸长36 mm,外径30 mm;外表面加工有十二个相同尺寸的平面,平面宽度为8.2 mm;内孔加工有M24×1.5 mm的螺纹副。压电片沿厚度方向极化,利用d31振动模式,材料为PZT-4,每片尺寸长×宽×厚为16 mm×6 mm×1 mm,共12片。输出轴采用黄铜材料,具有M24×1.5 mm的外螺纹结构,总长50 mm,电机有效行程为14 mm。
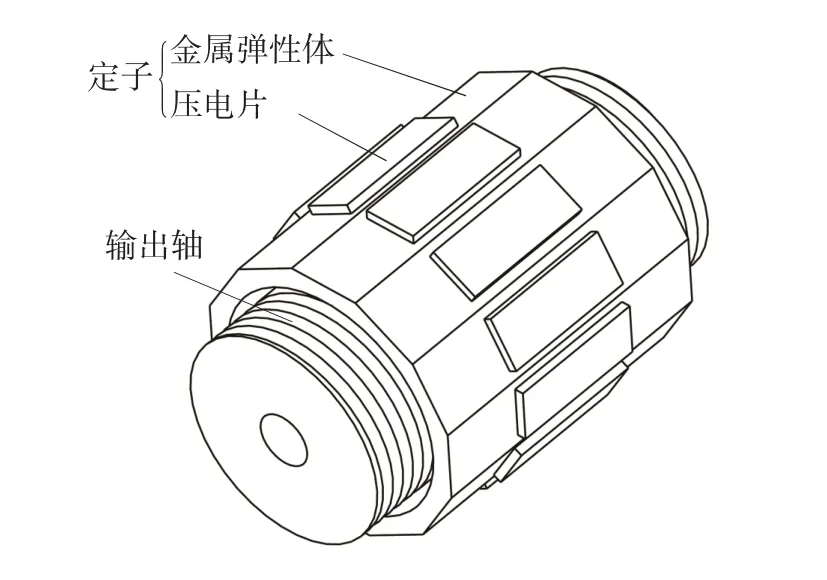
图1 超声电机的结构示意图Fig.1Structure sketch of ultrasonic motor
图2所示为研制出的一种多波长激振模式的螺纹副驱动型超声电机样机的实物照片。
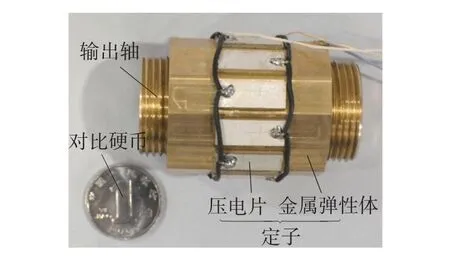
图2 样机实物照片Fig.2Photograph of the motor prototype
2 激励模式与仿真
2.1 定子激励模式分析
图3所示为多波长激振模式螺纹副驱动型超声电机定子中压电片的布片方式与激励方法示意图。
为了激发定子产生一个沿圆周方向行进的波长数为3的驱动行波,本文采用12片压电片进行激振。具体为压电片A1~A6构成激振组A,通以与定子轴向一阶弯曲模态频率相吻合的U0sinωt交流电信号,激发出一个沿定子圆周方向分布的具有3个波长的驻波振动SA;压电片B1~B6构成激振组B,通以与定子轴向一阶弯曲模态频率相吻合的U0sin (ωt+φ)交流电信号,同样激发出一个沿定子沿圆周方向分布的具有3个波长的驻波振动SB,金属弹性体接地。图中P表示压电片的极化方向。
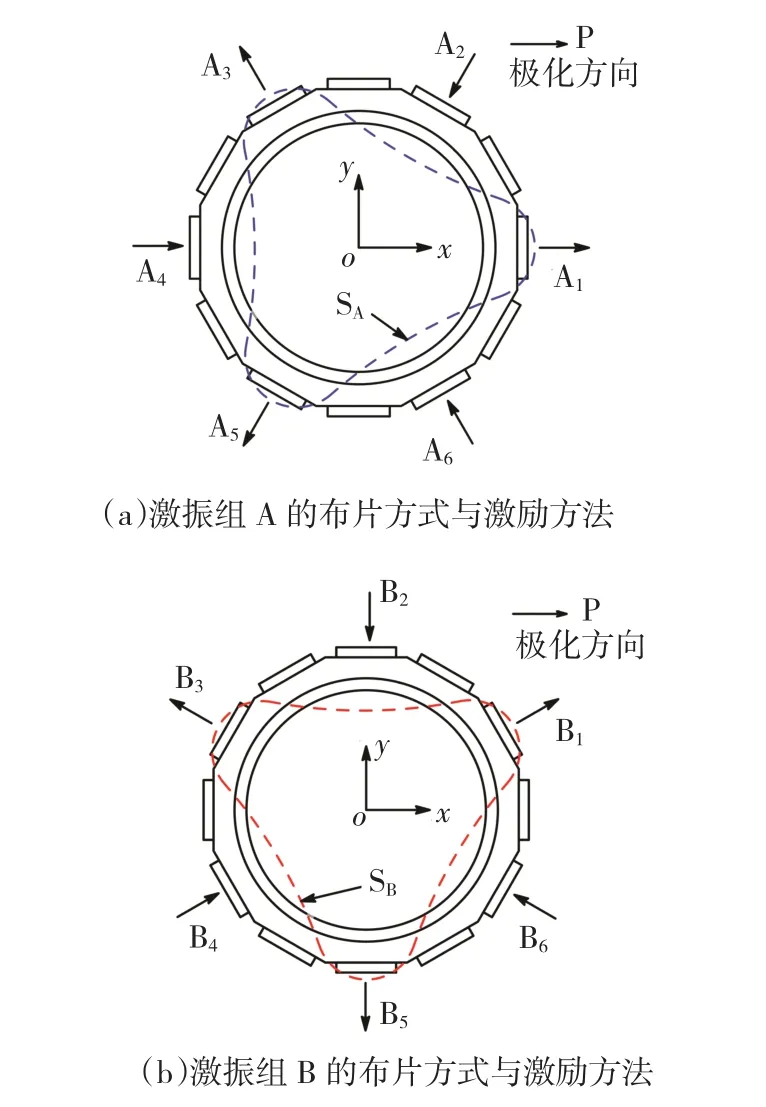
图3 定子布片方式与激励方法示意图Fig.3Sketch for the polarization and exciting mode of stator
由文献[13-15]可知,当激振组A与激振组B间的激励电信号相位差φ为90°时,驻波振动SA与驻波振动SB可以合成一个波长数为3的驱动行波,通过螺纹副实现输出轴的运动输出;而当相位差φ改变为270°时,合成驱动行波反向运行,即可实现对输出轴的反向驱动。
2.2 定子振动模态仿真
根据图1中所示多波长激振模式螺纹副驱动型超声电机定子的设计结构,利用有限元分析软件ANSYS建立定子有限元仿真模型,并对其进行模态仿真分析。开展有限元仿真分析时,金属弹性体选用Solid 45单元,采用自由的网格划分方式;压电片选用Solid 5单元,采用扫掠的网格划分方式。定子模态仿真分析结果如图4所示。
模态分析结果表明,在定子谐振频率为47.58 kHz时,定子存在轴向为一阶弯曲振动,圆周方向为3个波长振动分布的振动模态。由此证明了本文提出的多波长激振模式在理论上是可行的。
有限元仿真时,黄铜金属弹性体的弹性模量设置为90 GPa,泊松比为0.33,密度为8 900 kg/m3,压电片的密度为7 500 kg/m3。由于压电材料属性为各项异性,故有限元仿真时采用矩阵的方式进行参数输入。具体包括压电片的介电系数矩阵[ε]、压电应力矩阵[e]和弹性系数矩阵[c],参数取值情况见表1。
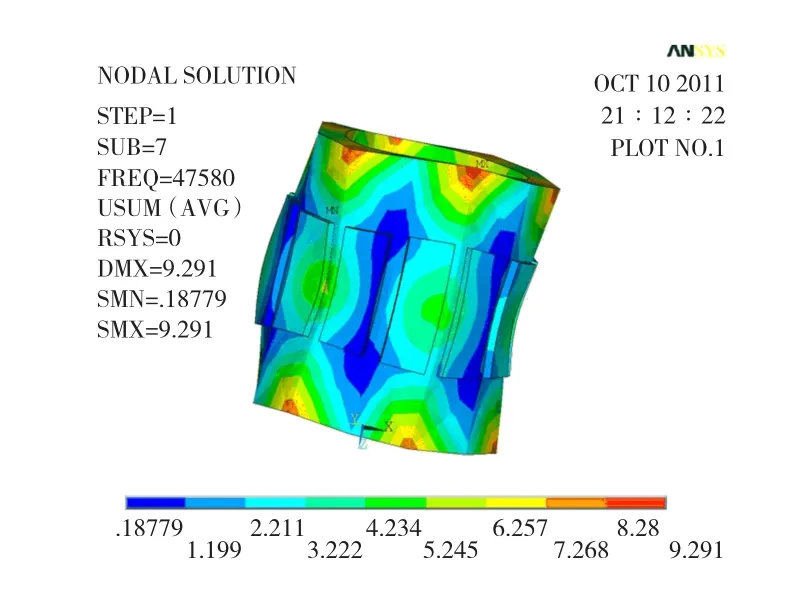
图4 定子振动模态仿真Fig.4The vibration mode simulation of stator
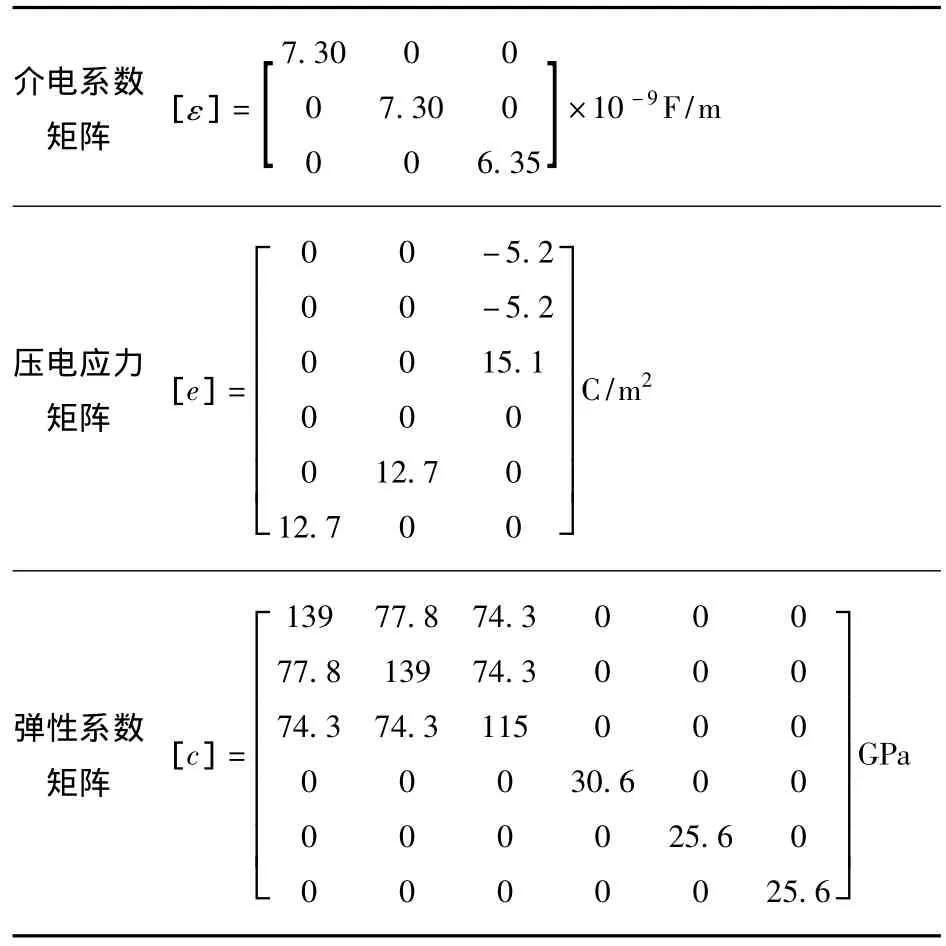
表1 压电片的性能参数Table 1Parameters of the PZT plates
3 样机测试
在开展多波长激振模式螺纹副驱动型超声电机的特性测试实验研究之前,首先利用阻抗分析仪(型号:PV70A)对定子与整机的阻抗特性进行测试,测试结果如图5所示。
根据前文有限元仿真结果,设置扫描激振频率fc的扫描测试范围为49~55 kHz。测试结果表明,定子与整机的共振频率fss与fsm分别为51.88 kHz和51.93 kHz,反共振频率fps与fpm分别52.40 kHz与52.54 kHz。其中定子的共振频率测试结果略大于前述利用有限元法仿真所得结果,但总体吻合情况较好。
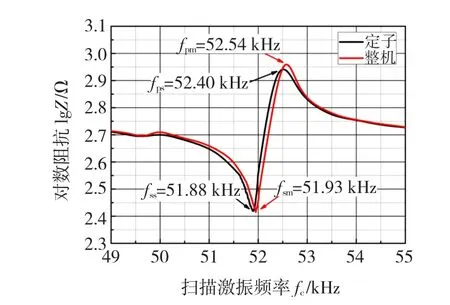
图5 定子与整机的阻抗特性测试结果Fig.5Impedance characteristics testing results of the stator and prototype motor
利用文献[16]中所搭建的基于虚拟仪器技术的超声电机测试系统,对样机的基本特性进行测试。固定负载力Fn为2 N(质量块0.2 kg),激振组A与激振组B两路激励电信号的相位差φ为90°,在激励电压有效值Vrms分别为32 V、42 V与53 V的条件下,在51.8~52.4 kHz测试范围,调节激振频率f大小,得到样机固定负载力下的调频特性测试结果如图6所示。
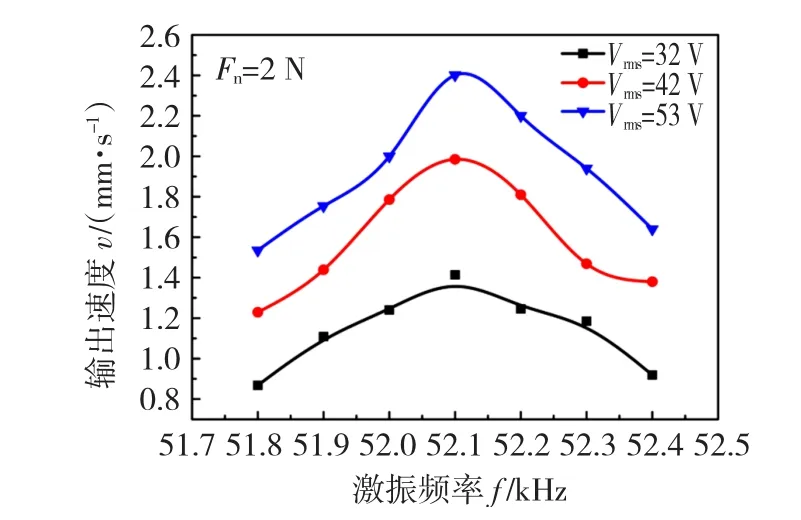
图6 固定负载力下的调频特性Fig.6Frequency modulation characteristics under the constant load force
固定激励电压的有效值Vrms为42 V,仍然保持两组激励电信号的相位差φ为90°,选择三组不同的负载力Fn,负载力Fn分别为2 N、7 N与12 N,激振频率f的测试范围仍为51.8~52.4 kHz。得到样机固定激励电压下的调频特性测试结果如图7所示。
由图6与图7的测试结果可知,在激振频率51.8~52.4 kHz范围内,样机均可实现较好的工作,这与前文利用有限元法仿真以及阻抗特性所得结果吻合较好。因此,本文在后续实验研究中,选定激振频率f为52.1 kHz作为样机的工作频率。
保持负载力Fn为2 N,激励频率f为52.1 kHz,激励电压有效值Vrms为42 V,在0~360°范围内调节激振组A与激振组B两路激励电信号的相位差φ,测试得到样机的调相位差特性曲线,测试结果如图8所示。
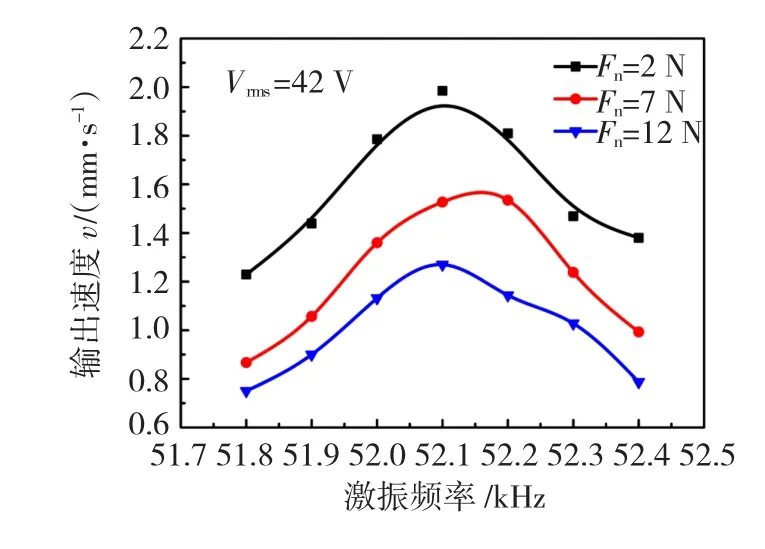
图7 固定激励电压下的调频特性Fig.7Frequency modulation characteristics under the constant exciting voltage
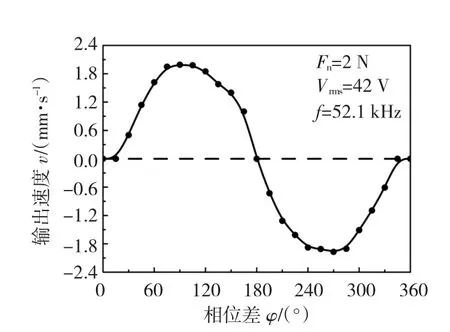
图8 调相位差特性测试结果Fig.8Testing results of different phase characteristics
可以看出,电机的输出速度与相位差基本呈正弦规律变化,比较理想的工作相角范围为60°~120°与240°~300°之间。图中输出速度的正负仅表示输出轴的运动方向相反。
图9所示为样机在2 N负载力下的输出速度υ及电机最大输出力Fmax随激励电压变化情况。激振频率f为52.1 kHz保持不变,两路激励电信号的相位差φ为90°,激励电压有效值Vrms的测试范围为14~56 V。
由图9可知,电机的输出速度与最大输出力随激励电压的增大而增大,且满足较好的线性关系。这一特性为开展电机伺服控制策略的研究带来方便。
图10所示为激励电压有效值Vrms为42 V下的样机负载特性测试结果。测试条件仍选为激振频率f为52.1 kHz,两路激励电信号相位差φ为90°。
负载特性表明,随着负载力的增大,电机输出速度近似成线性规律降低,电机的最大输出力可达40 N。
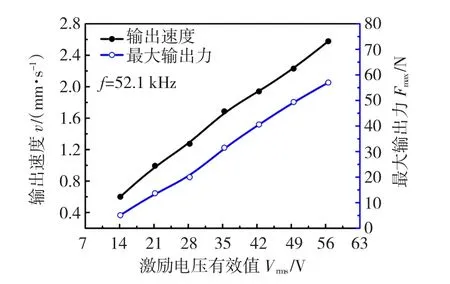
图9 调压特性测试结果Fig.9Testing results of voltage modulation characteristics
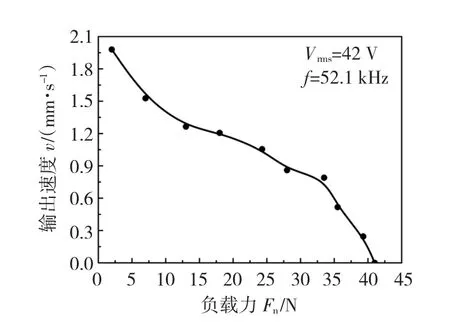
图10 样机的负载特性Fig.10Load characteristics of the prototype
4 结论
提出了一种多波长激振模式的螺纹副驱动型超声电机。电机主要由定子与螺纹输出轴组成,其中定子通过将12片压电片粘贴至筒状金属弹性体外表面构成。电机工作时,激发定子产生沿圆周方向分布的一个波长数为3的驱动行波,以此增大定子与螺纹输出轴间的接触驱动区域,提高电机的输出性能。研制出一台定子尺寸长×宽×内径为36 mm ×30 mm×M24 mm的原型样机,进行了实验验证。测试结果表明,采用本文提出的多波长驱动模式可以实现电机的有效驱动,样机工作频率为52.1 kHz,在激励电压有效值42 V时,样机2 N负载下的输出速度为2.0 mm/s,最大输出力可达40 N,具有中小负载工况下驱动与定位能力。
[1]UCHINO K.Piezoelectric actuators-expansion from IT/robotics to ecological/energy applications[J].Journal of Electroceramics,2008,20(3):301-311.
[2]WATSON B,FRIEND J,YEO L.Piezoelectric ultrasonic micromilli scale actuators[J].Sensors and Actuators A:Physical,2009,152(5):219-233.
[3]TUROWSKI S G,SESHADRI M,LOECHER M,et al.Performance of a novel piezoelectric motor at 4.7 T:applications and initial tests[J].Magnetic Resonance Imaging,2008,26(3):426-432.
[4]PATRONIK N A,OTA T,ZENATI M A,et al..A miniature mobile robot for navigation and positioning on the beating heart[J].IEEE Transactions on Robotics,2009,25(5):1109-1124.
[5]PATRONIK N A,OTA T,ZENATI M A,et al.Synchronization of epicardial crawling robot with heartbeat and respiration for improved safety and efficiency of locomotion[J].International Journal of Medical Robotics and Computer Assisted Surgery,2012,8 (1):97-106.
[6]HENDERSON D A.Simple ceramic motor,inspiring smaller products[C]//10th International Conference on New Actuators,June 14-16,2006,Bremen,Germany.2006:1-4.
[7]HENDERSON D A.Novel piezo motor enables positive displacement micro-fluidic pump[C]//2007 NSTI Nanotechnology Conference and Trade Show,May 20-24,2007,Santa Clara,USA.2007:272-275.
[8]ZHANG J T,HUANG W Q,ZHU H,et al.Lead screw linear ultrasonic motor using bending vibration modes[J].Transactions of Nanjing University of Aeronautics&Astronautics,2009,26(2): 89-94.
[9]ZHANG J T,ZHU H,ZHAO C S.Contact analysis and modeling of a linear ultrasonic motor with a threaded output shaft[J].Journal of Electroceramics,2012,29(4):254-261.
[10]周铁英,张筠,陈宇,等.螺母型超声电机及其在透镜调焦中的应用[J].科学通报,2008,53(11):1251-1256.
ZHOU Tieying,ZHANG Yun,CHEN Yu,et al.A nut-type ultrasonic motor and its application in the focus system[J].Chinese Science Bulletin,2008,53(11):1251-1256.
[11]ZHOU T Y,CHEN Y,LU C Y.Integrated lens auto-focus system driven by a nut-type ultrasonic motor(USM)[J].Science in China Series E:Technological Sciences,2009,52(9):2591-2596.
[12]程廷海,郭向东,包钢.中空柱状定子二阶弯振的旋转-直线超声电机[J].电机与控制学报,2013,17(3):8-12.
CHENG Tinghai,GUO Xiangdong,BAO Gang.Rotary-linear ultrasonic motor based on second bending vibration mode of hollow cylindrical stator[J].Electric Machines and Control,2013,17(3): 8-12.
[13]朱华,陈超,赵淳生.一种微型柱体超声电机的研究[J].中国电机工程学报,2006,26(12):128-133.
ZHU Hua,CHEN Chao,ZHAO Chunsheng.Investigation on a cylindrical ultrasonic micromotor[J].Proceedings of the CSEE,2006,26(6):128-133.
[14]BEKIROGLU E.Ultrasonic motors:their models,drives,controls and applications[J].Journal of Electroceramics,2008,20 (3-4):277-286.
[15]IULA A,BOLLINO G.A travelling wave rotary motor driven by three pairs of langevin transducers[J].IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control,2012,59(1): 121-127.
[16]程廷海,黄鹞,包钢,等.基于LabVIEW的超声电机测试系统[J].传感器与微系统,2011,30(4):114-116.
CHENG Tinghai,HUANG Yao,BAO Gang,et al..A measurement system for ultrasonic motor based on LabVIEW[J].Transducer and Microsystem Technologies,2011,30(4):114-116.
(编辑:张诗阁)
Screw type ultrasonic motor utilizing multi-wavelength exciting mode
CHENG Ting-hai1,WANG Liang1,GAO Han2,BAO Gang2,WANG Ying-ting1
(1.School of Mechatronic Engineering,Changchun University of Technology,Changchun 130012,China; 2.School of Mechatronics Engineering,Harbin Institute of Technology,Harbin 150080,China)
To increase the output force and improve the contact driving status between stator and output shaft of screw type ultrasonic motor,a cylindrical stator by attaching 12 PZT plates on a metal elastomer was presented.A traveling wave with the 3 wavelengths processing along the circumference of stator was excited to drive the screw output shaft.And a novel screw type ultrasonic motor utilizing the multi-wavelength exciting mode was proposed.The design of ultrasonic motor was given out.The exciting method of multi-wavelength exciting mode was clarified.A vibration mode simulation of stator was carried out by the finite element method.A prototype of screw type ultrasonic motor utilizing the multi-wavelength exciting mode was developed.The dimension of stator is 36 mm×30 mm×M24 mm(length×width×inner diameter).The testing results indicate that the prototype utilizing the multi-wavelength exciting mode can be driven availably.The output velocity and force increase linearly as the exciting voltage rises.A maximum output force 40 N can be obtained at a 52.1 kHz working frequency and an exciting voltage of effective value 42 V.
ultrasonic motor;screw;traveling wave;multi-wavelength;output force
10.15938/j.emc.2015.03.005
TM 356
A
1007-449X(2015)03-0025-05
2014-05-13
国家自然科学基金资助项目(51075080)
程廷海(1983—),男,博士,讲师,研究方向为基于压电效应的智能结构与系统设计;
王良(1990—),男,硕士研究生,研究方向为压电马达的结构设计与仿真;
高焓(1986—),男,博士研究生,研究方向为超声驱动技术与仿真;
包钢(1960—),男,博士,教授,博士生导师,研究方向为新型气动元件与气动伺服系统;
王英廷(1990—),男,硕士研究生,研究方向为压电装置的结构设计与仿真。
程廷海
